小白菜的opencv学习(8)边缘检测和渐变
这一节我们主要来学习边缘检测以及轮廓查找
对着代码讲故事:
import cv2
import numpy as np
img = cv2.imread('HSV.jpg')
cv2.imshow('img',img)
#laplacian = cv2.Laplacian(img,cv2.CV_64F)
#sobelx = cv2.Sobel(img,cv2.CV_64F,1,0,ksize=5)
#sobely = cv2.Sobel(img,cv2.CV_64F,0,1,ksize=5)
#cv2.imshow('laplacian',laplacian)
#cv2.imshow('sobelx',sobelx)
#cv2.imshow('sobely',sobely)
edges = cv2.Canny(img,100,200)
cv2.imshow('Edges',edges)
cv2.waitKey(0)
cv2.destroyAllWindows()
程序中注释掉的三行就是图像的渐变,是用来检测图像方向的强度。额,我没搞懂什么意思,另外目前也没有用到,所以不做深入的了解。
接下来就是图像的边缘检测,用到了cv2.Canny()函数,很简单,参数有图片和两个阀值。
先用大阀值进行处理,一般情况下处理出来的都是断断续续的,所以再用小阀值进行连接。
可以看到,边缘识别是有了,但是咱们的这张图中边缘很多,所以效果可能并不好。那么如果我要识别其中辣椒的边缘,那么我可以用到之前颜色过滤的内容:
import cv2
import numpy as np
img = cv2.imread('HSV.jpg')
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
cv2.imshow('img',img)
lower_red1 = np.array([160,50,0])
upper_red1 = np.array([179,255,255])
lower_red2 = np.array([0,50,0])
upper_red2 = np.array([10,255,255])
mask1 = cv2.inRange(hsv, lower_red1, upper_red1)
mask2 = cv2.inRange(hsv, lower_red2, upper_red2)
mask = mask1 + mask2
res = cv2.bitwise_and(img,img, mask = mask)
cv2.imshow('res',res)
edges = cv2.Canny(res,150,300)
cv2.imshow('Edges',edges)
cv2.waitKey(0)
cv2.destroyAllWindows()
可以看到效果比较好。
接下来我们来了解轮廓查找。
唉嘿?轮廓和边缘不一样么?其实这两者之间从字面上来讲差距不大。但是在opencv中,边缘检测是根据像素间的差异来检测出轮廓边界的像素并标出来,但是并没有将轮廓作为一个整体进行处理。可以将这些像素点合成轮廓,opencv提供了一个这样的函数:cv2.findContours()
cv2.findContours()处理的对象可以是Canny()之后的有边缘像素的图像,也可以是threshold()之后的二值图像。当然,这两者是有一定区别的,这个后面介绍。
先看代码:
import cv2
import numpy as np
img = cv2.imread('HSV.jpg')
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
lower_red1 = np.array([160,50,0])
upper_red1 = np.array([179,255,255])
lower_red2 = np.array([0,50,0])
upper_red2 = np.array([10,255,255])
mask1 = cv2.inRange(hsv, lower_red1, upper_red1)
mask2 = cv2.inRange(hsv, lower_red2, upper_red2)
mask = mask1 + mask2
res = cv2.bitwise_and(img,img, mask = mask)
cv2.imshow('res',res)
mask,contours, hierarchy = cv2.findContours(mask,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
cv2.drawContours(img,contours,-1,(0,255,255),2)
cv2.imshow('img',img)
print(contours)
print(hierarchy)
cv2.waitKey(0)
cv2.destroyAllWindows()
可以看到,我们通过cv2.findContours()在颜色过滤后的mask中找到了一些点集,然后用cv2.drawContours()画了出来。
这个图比较复杂,我们来找一张比较简单的图片来进行示范:
 .
.
可以看到,这里图片的轮廓被圈了起来。这里要注意不能套用上面的代码。因为图像简单,所以只需要把图像简单的二值化就可以了。
这里contours和hierarchy的值变得简单,其中contours是轮廓转角的坐标,而hierarchy中的个数则是轮廓的个数。
[[[-1 -1 1 -1]
[ 2 -1 -1 0]
[-1 1 3 0]
[ 4 -1 -1 2]
[-1 3 -1 2]]]
这里有5个轮廓,每个轮廓用一个含有四个整数的元素代替,每个元素含义如下表:
| 索引 | 含义 |
|---|---|
| 0 | 同级的下一个轮廓 |
| 1 | 同级的上一条轮廓 |
| 2 | 下级的第一个子节点 |
| 3 | 上级的父节点 |
那么我们可以通过得到的数据判断有多少条轮廓以及之间的关系如何。针对这次得到的数据可以得到这样的图:
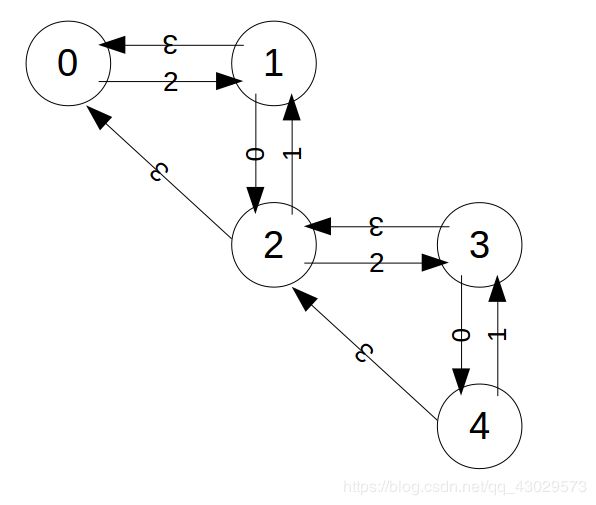
其中圆圈和中间的数字n表示第(n+1)条轮廓,n从0开始。
箭头和上面的数字n表示由箭头出发处的轮廓对应数组中第(n+1)个数据对应箭头指向的轮廓,这两个是相等的。
这点比较难理解,可以自己尝试根据这几组数据来重新画一张这样的图。