锁机制及CAS实现原理
文章目录
- 锁机制
- 悲观锁
- 乐观锁
- 锁机制存在的问题
- 两种锁总结
- CAS(Compare & Set/Compare & Swap)
- CAS算法原理描述
- C/C++程序中,CAS的各种实现版本
- 基于链表的非阻塞堆栈实现
- 无锁队列的链表实现
- CAS的ABA问题
- 解决ABA问题
- CAS的问题
锁机制
常用的锁机制有两种:悲观锁、乐观锁
悲观锁
- 假定会发生并发冲突,屏蔽一切可能违反数据完整性的操作。
- 悲观锁的实现,往往依靠底层提供的锁机制。
- 悲观锁会导致其它所有需要锁的线程挂起,等待持有锁的线程释放锁。
乐观锁
-
假设不会发生并发冲突,每次不加锁而是假设没有冲突而去完成某项操作,只在提交操作时检查是否违反数据完整性。
-
如果因为冲突失败就重试,直到成功为止。
-
乐观锁大多是基于数据版本记录机制实现。
-
为数据增加一个版本标识,比如在基于数据库表的版本解决方案中,一般是通过为数据库表增加一个 “version” 字段来实现。读取出数据时,将此版本号一同读出,之后更新时,对此版本号加一。
-
此时,将提交数据的版本数据与数据库表对应记录的当前版本信息进行比对,如果提交的数据版本号大于数据库表当前版本号,则予以更新,否则认为是过期数据。
-
乐观锁的缺点是不能解决脏读的问题。
-
在实际生产环境里边,如果并发量不大且不允许脏读,可以使用悲观锁解决并发问题。
-
如果系统的并发非常大的话,悲观锁定会带来非常大的性能问题,所以我们就要选择乐观锁定的方法。
锁机制存在的问题
- 在多线程竞争下,加锁、释放锁会导致比较多的上下文切换和调度延时,引起性能问题。
- 一个线程持有锁会导致其它所有需要此锁的线程挂起。
- 如果一个优先级高的线程等待一个优先级低的线程释放锁会导致优先级倒置,引起性能风险。
volatile是不错的机制,但是volatile不能保证原子性。因此对于同步最终还是要回到锁机制上来。
两种锁总结
- 独占锁是一种悲观锁,synchronized就是一种独占锁,会导致其它所有需要锁的线程挂起,等待持有锁的线程释放锁。
- 所谓乐观锁就是,每次不加锁而是假设没有冲突而去完成某项操作,如果因为冲突失败就重试,直到成功为止。
CAS(Compare & Set/Compare & Swap)
CAS是解决多线程并行情况下使用锁造成性能损耗的一种机制。
- CAS操作包含三个操作数——内存位置(V)、预期原值(A)、新值(B)。
- 如果内存位置的值与预期原值相匹配,那么处理器会自动将该位置值更新为新值。
- 否则,处理器不做任何操作。
- 无论哪种情况,它都会在CAS指令之前返回该位置的值。
- CAS有效地说明了“我认为位置V应该包含值A;如果包含该值,则将B放到这个位置;否则,不要更改该位置,只告诉我这个位置现在的值即可。
一个 CAS 涉及到以下操作:
假设内存中的原数据V,旧的预期值A,需要修改的新值B
- 比较 A 与 V 是否相等
- 如果比较相等,将 B 写入 V
- 返回操作是否成功
CAS算法原理描述
- 在对变量进行计算之前(如 ++ 操作),首先读取原变量值,称为 旧的预期值 A
- 然后在更新之前再获取当前内存中的值,称为 当前内存值 V
- 如果 A==V 则说明变量从未被其他线程修改过,此时将会写入新值 B
- 如果 A!=V 则说明变量已经被其他线程修改过,当前线程应当什么也不做。
- 用C语言来描述该操作
看一看内存*reg里的值是不是oldval,如果是的话,则对其赋值newval。
int compare_and_swap (int* reg, int oldval, int newval)
{
int old_reg_val = *reg;
if (old_reg_val == oldval)
*reg = newval;
return old_reg_val;
}
- 变种为返回bool值形式的操作
返回 bool值的好处在于,调用者可以知道有没有更新成功
bool compare_and_swap (int *accum, int *dest, int newval)
{
if ( *accum == *dest )
{
*dest = newval;
return true;
}
return false;
}
C/C++程序中,CAS的各种实现版本
- GCC的CAS,GCC4.1+版本中支持CAS的原子操作。
1)bool __sync_bool_compare_and_swap (type *ptr, type oldval, type newval, ...)
2)type __sync_val_compare_and_swap (type *ptr, type oldval, type newval, ...)
- C++11中的CAS,C++11中的STL中的atomic类的函数可以让你跨平台。
template< class T > bool atomic_compare_exchange_weak( std::atomic* obj,T* expected, T desired );
template< class T > bool atomic_compare_exchange_weak( volatile std::atomic* obj,T* expected, T desired );
- Windows的CAS
InterlockedCompareExchange ( __inoutLONGvolatile *Target,
__inLONGExchange,
__inLONGComperand);
基于链表的非阻塞堆栈实现
- 数据结构
template
class Stack {
typedef struct Node {
T data;
Node* next;
Node(const T& d) : data(d), next(0) { }
} Node;
Node *top;
public:
Stack( ) : top(0) { }
void push(const T& data);
T pop( ) throw (…);
};
- 在非阻塞堆栈中压入数据(push)
void Stack::push(const T& data)
{
Node *n = new Node(data);
while (1) {
n->next = top;
if (__sync_bool_compare_and_swap(&top, n->next, n)) { // CAS
break;
}
}
}
上述过程描述:
- 从单一线程的角度来看,创建了一个新节点,它的 next 指针指向堆栈的顶部。
- 接下来,调用 CAS 内置函数,把新的节点复制到 top 位置。
- 从多个线程的角度来看,完全可能有两个或更多线程同时试图把数据压入堆栈。
- 假设线程 A 试图把 20 压入堆栈,线程 B 试图压入 30,而线程 A 先获得了时间片。
- 但是,在 n->next = top 指令结束之后,调度程序暂停了线程 A。
- 现在,线程 B 获得了时间片(它很幸运),它能够完成 CAS,把 30 压入堆栈后结束。
- 接下来,线程 A 恢复执行,显然对于这个线程 *top 和 n->next 不匹配,因为线程 B 修改了 top 位置的内容。
- 因此,代码回到循环的开头,指向正确的 top 指针(线程 B 修改后的),调用 CAS,把 20 压入堆栈后结束。
- 整个过程没有使用任何锁。
- 从非阻塞堆栈弹出数据(pop)
T Stack::pop( )
{
while (1) {
Node* result = top;
if (result == NULL)
throw std::string(“Cannot pop from empty stack”);
if (top && __sync_bool_compare_and_swap(&top, result, result->next)) { // CAS
return result->data;
}
}
}
这样,即使线程 B 在线程 A 试图弹出数据的同时修改了堆栈顶,也可以确保不会跳过堆栈中的元素。
无锁队列的链表实现
1.用CAS实现的入队操作
EnQueue(x)//进队列
{
//准备新加入的结点数据
q = newrecord();
q->value = x;
q->next = NULL;
do{
p = tail; //取链表尾指针的快照
}while( CAS(p->next, NULL, q) != TRUE); //如果没有把结点链上,再试
CAS(tail, p, q); //置尾结点
}
我们可以看到,程序中的那个 do- while 的 Re-Try-Loo。就是说,很有可能我在准备在队列尾加入结点时,别的线程已经加成功了,于是tail指针就变了,于是我的CAS返回了false,于是程序再试,直到试成功为止。
为什么我们的“置尾结点”的操作不判断是否成功:
- 如果有一个线程T1,它的while中的CAS如果成功的话,那么其它所有随后线程的CAS都会失败,然后就会再循环,
- 此时,如果T1 线程还没有更新tail指针,其它的线程继续失败,因为tail->next不是NULL了。
- 直到T1线程更新完tail指针,于是其它的线程中的某个线程就可以得到新的tail指针,继续往下走了。
这里有一个潜在的问题——如果T1线程在用CAS更新tail指针的之前,线程停掉了,那么其它线程就进入死循环了。下面是改良版的EnQueue()
EnQueue(x)//进队列改良版
{
q = newrecord();
q->value = x;
q->next = NULL;
p = tail;
oldp = p
do{
while(p->next != NULL)
p = p->next;
}while( CAS(p.next, NULL, q) != TRUE); //如果没有把结点链上,再试
CAS(tail, oldp, q); //置尾结点
}
我们让每个线程,自己fetch 指针 p 到链表尾。但是这样的fetch会很影响性能。而通实际情况看下来,99.9%的情况不会有线程停转的情况,所以,更好的做法是,你可以接合上述的这两个版本,如果retry的次数超了一个值的话(比如说3次),那么,就自己fetch指针。
- 用CAS实现的出队操作
DeQueue()//出队列
{
do{
p = head;
if(p->next == NULL){
returnERR_EMPTY_QUEUE;
}
while( CAS(head, p, p->next) != TRUE );
returnp->next->value;
}

DeQueue的代码操作的是 head->next,而不是head本身。这样考虑是因为一个边界条件,我们需要一个dummy的头指针来解决链表中如果只有一个元素,head和tail都指向同一个结点的问题,这样EnQueue和DeQueue要互相排斥了。
总结:上述我们设计了支持并发访问的数据结构。可以看到,设计可以基于互斥锁,也可以是无锁的。无论采用哪种方式,要考虑的问题不仅仅是这些数据结构的基本功能 — 具体来说,必须一直记住线程会争夺执行权,要考虑线程重新执行时如何恢复操作。目前,解决方案(尤其是无锁解决方案)与平台/编译器紧密相关。
CAS的ABA问题
ABA问题描述:
- 进程P1在共享变量中读到值为A
- P1被抢占了,进程P2执行
- P2把共享变量里的值从A改成了B,再改回到A,此时被P1抢占。
- P1回来看到共享变量里的值没有被改变,于是继续执行。
举例1:
比如上述的DeQueue()函数,因为我们要让head和tail分开,所以我们引入了一个dummy指针给head,当我们做CAS的之前,如果head的那块内存被回收并被重用了,而重用的内存又被EnQueue()进来了,这会有很大的问题。(内存管理中重用内存基本上是一种很常见的行为)
举例2:
-
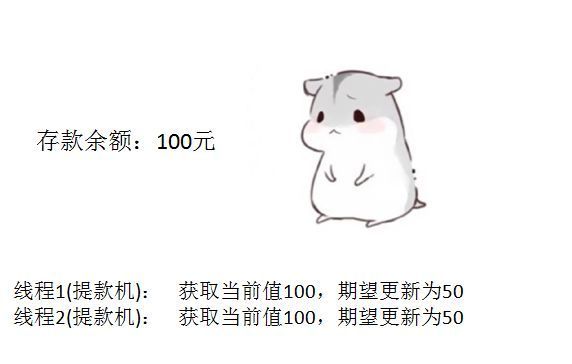
我们假设一个提款机的例子。假设有一个遵循CAS原理的提款机,小灰有100元存款,要用这个提款机来提款50元。

-
由于提款机硬件出了点问题,小灰的提款操作被同时提交了两次,开启了两个线程,两个线程都是获取当前值100元,要更新成50元。
-
理想情况下,应该一个线程更新成功,一个线程更新失败,小灰的存款值被扣一次。
-
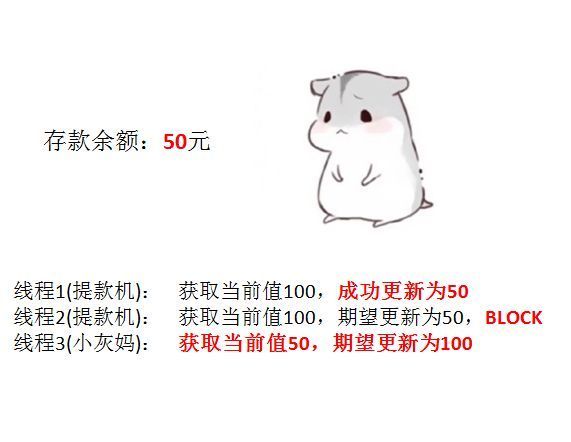
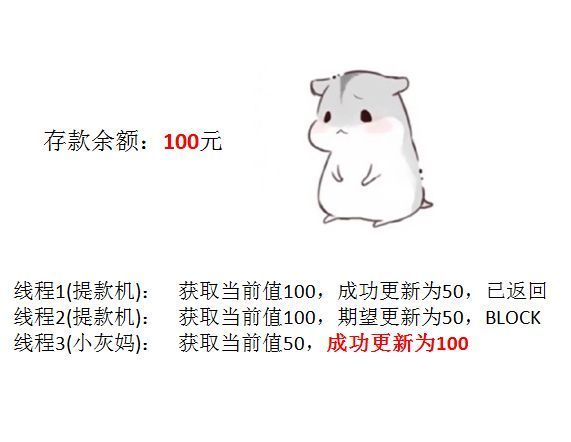
线程1首先执行成功,把余额从100改成50.线程2因为某种原因阻塞。这时,小灰的妈妈刚好给小灰汇款50元。
-
线程2仍然是阻塞状态,线程3执行成功,把余额从50改成了100。
-
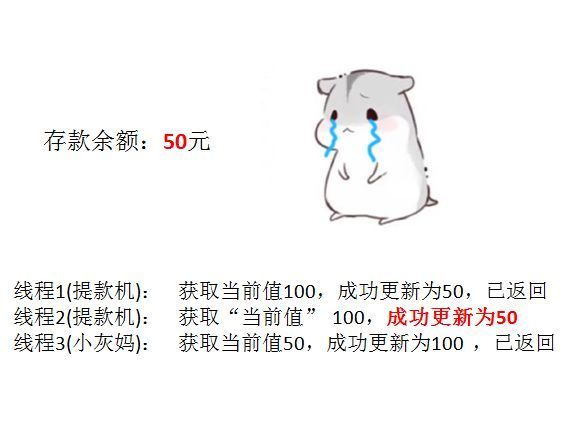
线程2恢复运行,由于阻塞之前获得了“当前值”100,并且经过compare检测,此时存款实际值也是100,所以会成功把变量值100更新成50。
-
原本线程2应当提交失败,小灰的正确余额应该保持100元,结果由于ABA问题提交成功了。
解决ABA问题
真正要做到严谨的CAS机制,我们在compare阶段不仅要比较期望值A和地址V中的实际值,还要比较变量的版本号是否一致。
举个栗子:
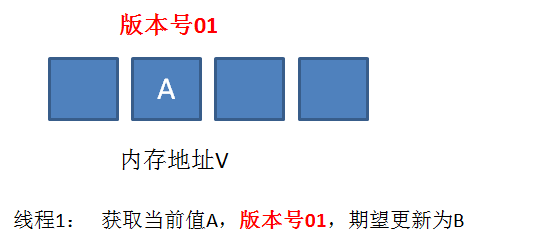
- 假设地址V中存储着变量值A,当前版本号是01。线程1获取了当前值A和版本号01,想要更新为B,但是被阻塞了。
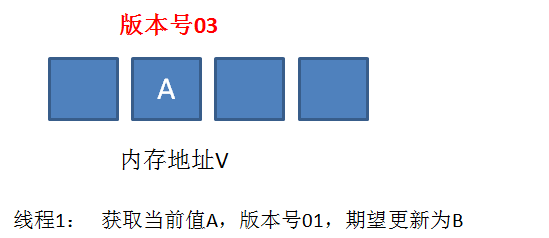
- 这时候,内存地址V中变量发生了多次改变,版本号提升为03,但是变量值仍然是A。
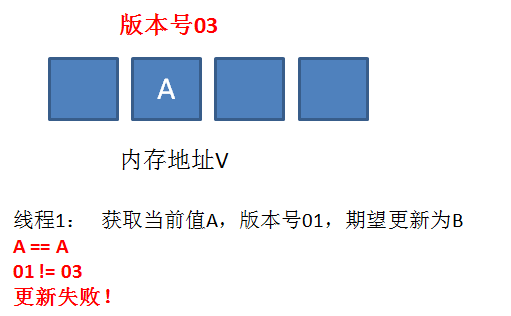
- 随后线程1恢复运行,进行compare操作。经过比较,线程1所获得的值和地址的实际值都是A,但是版本号不相等,所以这一次更新失败。
CAS的问题
- ABA问题
-
因为CAS需要在操作值的时候,检查值有没有发生变化,没有发生变化才去更新。
但是如果一个值原来是A变成了B,又变成了A,CAS检查会判断该值未发生变化,实际却变化了。 -
解决思路:增加版本号,每次变量更新时把版本号+1,A-B-A就变成了1A-2B-3A。JDK5之后的atomic包提供了AtomicStampedReference来解决ABA问题,它的compareAndSet方法会首先检查当前引用是否等于预期引用,并且当前标志是否等于预期标志。全部相等,才会以原子方式将该引用、该标志的值设置为更新值。
2. 时间长、开销大
- 自旋CAS如果长时间不成功,会给CPU带来非常大的执行开销。
3. 只能保证一个共享变量的原子操作
- 对一个共享变量执行操作时,可以循环CAS方式确保原子操作。
- 但是对多个共享变量,就不灵了。
- 这里可以使用锁,或把多个共享变量合并为1个共享变量,如i=2,j=a,合并为ij=2a。然后用CAS操作ij。在JDK5后,提供了AtomicReference类来保证对象间的原子性,可以把多个共享变量放在一个对象里进行CAS操作。