拟合与优化——利用Scipy包的optimize模块
目录
- chap 0 对数组的操作
- 0.1 python中的数组创建
- 0.2 对数组的四则运算
- 0.3 各种ufunc函数
- chap 1 非线性方程组求解
- 1.1 基础版(不引入Jacobi矩阵 )
- 1.2 优化版(引入Jacobi矩阵)
- chap 2 最小二乘拟合[^1]
- 2.1 以线性函数 y=kx+b 为例
- 2.2 以三角函数 y=Asin(2 π \pi πk+ θ \theta θ)为例
- chap 3 求函数局域最优解
- chap 4求全域最优解
chap 0 对数组的操作
0.1 python中的数组创建
无论matlab中还是在python中数组都是参与运算的重要甚至是唯一载体,在python的各种科学计算库中都是围绕ndarray对象展开的。尤其是在对数组中的各个元素进行运算的时候,数组像是一个数的集合,在定义函数时,是数和数之间的运算,实际传入参数时又可灵活地选择数组,当然原本返回的是一个数,现在也返回一个数组。故而,博主的python科学计算之旅也从数组开始。
但是,这只是小白的学习笔记,而不是本科全书式的字典,并不求全面,只求掌握内核与精髓(会用就行,暂且先做个APIboy)。
1 利用 numpy 的array()的函数
np.array(list)
import numpy as np
a = np.array([1,2,3,4])
b = np.array([5,6,7,8])
# 二维数组类似于list的嵌套
c = np.array([1,2,3],
[2,3,4],
[4,5,6])
故而可以用各种方式(简单赋值,range(),列表推导式等等)来先生成一个list,在用array函数即可。
2 利用numpy库自身的创建数组的函数
2.1 利用arange()函数
np.arange(start,end,step) (左闭右开)
np.arange(0,1,0.1)
# 生成了 array([0,0.1,0.2,0.3,0.4,0.5,0.6,0.7,0.8,0.9])
2.2 利用 linspace()函数
np.linspace(start,end,numOfNumbers)
np.linsapce(0,5,6)
# array([0,1,2,3,4,5])
linspace()与 arange()的区别在于,前者关心个数,后者关心增量
2.3 利用logspace()
np.logspace(start,end,numOfNumbers) 默认以 10 为底
np.logspace(0,2,5)
# array([1,3.16227766,10,31.622766,100])
0.2 对数组的四则运算
python是动态类型语言,事先无需声明变量的类型,为我们的创建与使用提供了方便(当然这也带来了负面影响)。这种灵活性的优势在数组的运算中可见一斑。
x = np.arange(1,100,2)
y = np.arange(0,99,2)
c = x+y
# 这种数组之间的运算,实际上是对数组对应的每一个元素进行运算,并且生成一个新的数组,本质上就是循环操作。
这种简洁性让正在学Java的博主感到很不适应。╮(╯▽╰)╭
诸如此类的 + - * / // 等等照搬过来即可
0.3 各种ufunc函数
ufunc 即 universal function的缩写,它是能对数组的每一个元素进行运算的的函数。
for example:
x = np.linspace(0,2*np.pi,10)
y = np.sin(x)
比如常用的sum函数
x=np.array([1,2,3])
np.sum(x)
# 6
凡此种种,不再列举。
chap 1 非线性方程组求解
求解非线性方程组,当然没有通用的解析方法,只能采取数值解法,本质上就是不断的猜测可能的一组解,带入方程对应的函数,使函数值逐渐逼近于0,所以这本质上也就是一个最优化的问题—— 使一个 向量值函数值 等于 零向量,即 f ⃗ \vec f f ( x ⃗ \vec x x) = 0 ⃗ \vec 0 0
1.1 基础版(不引入Jacobi矩阵 )
我们的工具 fsolve()函数
optimize.fsolve(func,x0)
func 即为误差函数(也就是方程组对应的那个向量值函数),x0 是初始设定的一组解,返回值即为方程组的解(一个数组)。
内部实现(博主的猜测):传入一组初值,计算误差,根据误差,调整 x ⃗ \vec x x,再次计算误差,直到误差小于阈值,然后终止循环,返回方程组的解 x ⃗ \vec x x。
我们以下面的非线性方程组为例,
{ 5 x 2 + 3 = 0 4 x 1 2 − 2 s i n ( x 2 x 3 ) = 0 x 2 x 3 − 1.5 = 0 \left\{ \begin{array}{c} 5x_2+3=0 \\ 4x_1^2-2sin(x_2x_3)=0\\ x_2x_3-1.5=0 \end{array} \right. ⎩⎨⎧5x2+3=04x12−2sin(x2x3)=0x2x3−1.5=0
代码实现
from scipy import optimize
import numpy as np
def func(x):
x1,x2,x3=x.tolist()
return np.array([5*x2+3 , 4*x1*x1-2*np.sin(x2*x3) , x2*x3-1.5])
result = optimize.fsolve(func,[1,1,1])
wucha =func(result)
print("结果",result,"\n","误差",wucha)
结果 [-0.70622057 -0.6 -2.5 ]
误差 [ 0.00000000e+00 -9.12603326e-14 5.32907052e-15]
1.2 优化版(引入Jacobi矩阵)
fsolve()函数的一个可选参数为 fprime=jacobi (prime有导数的意思)
我们知道,向量值函数的导数是一个矩阵,此矩阵便是雅各比矩阵,记为J

而向量值函数的微分在某点处的微分即为
d f ⃗ \vec f f ( x ⃗ \vec x x) = Jd x ⃗ \vec x x。
然后,就没有然后了。。。因为博主并没有对fsolve的代码实现进行分析,但是我们可以相信,传入函数的导数,可以根据导函数的走向更方便的逼近正确解。
def jac(x):
x1,x2,x3=x.tolist()
return np.mat([[0,5,0],
[8*x1,-2*x3*cos(x2*x3),-2*x2*cos(x2*x3)],
[0,x3,x2]
])
better_result = optimize.fsolve(func,[1,1,1],fprime=jac)
print("结果",better_result,"\n","误差",func(better_result))
结果 [-0.70622057 -0.6 -2.5 ]
误差 [ 0.00000000e+00 -9.12603326e-14 5.32907052e-15]
(╮(╯▽╰)╭,发现结果并没有什么差异)
但,fprime参数的传递可以更快的进行求解,尤其是在方程组的未知量很多的时候(50个以上,嗯,确实够多的……),求解速度可以提高好几倍。
chap 2 最小二乘拟合1
所谓拟合,就是有一组实验数据(离散的),我们猜测它们应该满足某种函数关系,比如线性关系,对数关系等,然后我们需要确定这个函数的一些参数(比如线性函数的斜率k和纵截距b),不妨用 p ⃗ \vec p p来表示这样的一组参数( p ⃗ \vec p p就实现为数组)。但我们用函数来刻画这种关系,当然希望误差最小,而这误差总要有一个标准。
标准可以是,找一个 p使得下式最小:
S ( p ) = ∑ i = 1 m ( y i − f ( x i , p ) ) 2 S(p) = \sum_{i = 1} ^m(y_i -f(x_i,p))^2 S(p)=i=1∑m(yi−f(xi,p))2
x i , y i x_i ,y_i xi,yi即为已知的一组实验数据,所以,S(p)即为关于p的一个函数(实际上是个多元数量值函数)。
基于这种标准的拟合就是 最小二乘拟合。
2.1 以线性函数 y=kx+b 为例
现在,我们发现拟合问题又转化为一个 求一组解,使函数值最小的问题了,
我们的工具 leastsq()函数,而它可以做到 求
sum((ydata - f(xdata, params))**2) 的minimum
于是optimize模块又可大显神通。
我们的工具
将要拟合的函数(p为待定值):
def func(x,p):
return
x,y可传递为数组,则wucha()也返回一个数组
def wucha(p,x,y):
return y-func(x,p)
X,Y为实验数据 ; p0初始化
result = optimize.leastsq(wucha,p0,args=(X,Y))
下面以线性函数为例:
import numpy as np
from scipy import optimize
"""
实验给定的一组数据,我们猜测其为线性关系
"""
X = np.array([8.19,2.72,6.39,8.71,4.7,2.66,3.78])
Y = np.array([7.01,2.78,6.47,6.71,4.1,4.23,4.05])
def wucha(p,x,y):
k,b = p # python的及其简洁的语法,一度让我很不适应
return y-(k*x+b)
result = optimize.leastsq(wucha,[1,0],args=(X,Y))
k,b = result[0];
# result 实际上为 (array([0.61349535, 1.79409254]), 1)
print('k=',k,'b=',b)
k= 0.6134953491930442 b 1.794092543259387
可视化分析:发现拟合情况非常好,绿线与黄线几乎重合
ps: [1,0],X,Y分别作为实参赋值给wucha(p,x,y)的形参p,x,y,wuch()会返回一个误差数组,leastsq函数对此求和,然后,根据返回值,调整p,循环往复,直到值最小,此时的p便是我们所求(还是和上面的一样,对optimize的实现不清楚,只能瞎说说了)
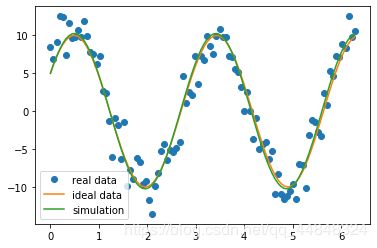
2.2 以三角函数 y=Asin(2 π \pi πk+ θ \theta θ)为例
下面我们以带有噪声的一组数据为例:
一个波,我们猜测它为一个正弦波参杂了噪声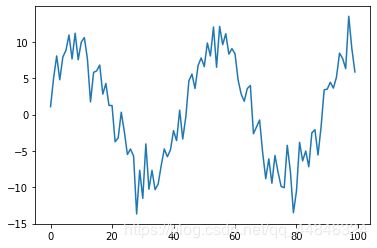
# -*- coding: utf-8 -*-
import numpy as np
import scipy as sp
import matplotlib.pylab as pl
def target(x,p):
A,k,theta = p
return A*np.sin(2*np.pi*k*x+theta)
def wucha(p,ydata,xdata):
return ydata - target(xdata,p)
"""
人工设置一组实验值,并且加上干扰值(否则拟合就没有意义了)
"""
xdata = np.linspace(0,2*np.pi,100)
p_real=[10,0.34,np.pi/6]
ydata_real= target(xdata,p_real)
np.random.seed(0)#设置一个种子值
ydata= ydata_real+ 2*np.random.randn(len(xdata))#真实数据
p0=[7,0.4,0]
result = sp.optimize.leastsq(wucha,p0,args=(ydata,xdata))
print("真实参数",p_real)
print("拟合参数",result[0])
#画个图,可视化一下
pl.plot(xdata,ydata,"o",label="real data")
pl.plot(xdata,ydata_real,label="ideal data")
pl.plot(xdata,target(xdata,result[0]),label="simulation")
pl.legend(loc="best")
真实参数 [10, 0.34, 0.5235987755982988]
拟合参数 [ 9.44553351 0.41676239 -0.04808953]
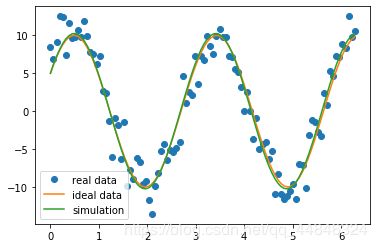
可视化分析:
chap 3 求函数局域最优解
在这里,会简单介绍一下利用optimize的minimize方法来求一个多元函数的操作方法,如前面的思想一样,只介绍怎么操作,不关心内部实现以及数学原理。
我们的工具:optimize.minimize
optimize.minimize(func,init_point,method,jac,hess)
以Rosenbrock函数为例:
f ( x , y ) = ( 1 − x ) 2 + 100 ( y − x 2 ) 2 f(x,y)=(1-x)^2+100(y-x^2)^2 f(x,y)=(1−x)2+100(y−x2)2
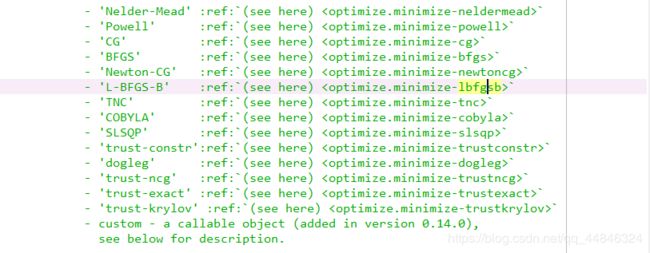
此函数很难搜索到最小值点,常用来检验各种算法(当然我们其实一眼就能看到其最小值在(1,1)处取得)
我们采用一种比较先进的算法 L-BFGS-B 2,当然还有其他多种,下图是博主截取的API文档
import numpy as np
from scipy import optimize
#目标导数
def target_function(p):
x,y =p.tolist()
z = (1-x)**2+100*(y-x**2)**2
return z
#一阶导数
def fjac(p):
x,y =p.tolist()
dx = -2+2*x-400*x*(y-x**2)
dy = 200*y-200*x**2
return np.array([dx,dy])
#二阶导数
def fhess(p):
x,y =p.tolist()
dxdx = 2*(600*x**2-200*y+1)
dxdy = -400*x
dydx = -400*x
dydy = 200
return np.array([dxdx,dxdy],[dydx,dydy])
# 初始猜测点
init_point = [-1,-1]
method = "L-BFGS-B"
result = optimize.minimize(target_function,init_point,
method=method,jac=fjac,hess=fhess)
print("极小值",result["fun"],"\n极小值点",result["x"])
极小值 6.521501346206669e-15
极小值点 [0.99999994 0.99999987]
ps:这里我们要求的就是一个极值点,所以在函数,一阶导,二阶导的参数必须是一个数组参数,否则会报错(target_function() missing 1 required positional argument)
chap 4求全域最优解
我们的工具:optimize.basinhopping
optimize.basinhopping(func,init_point,niter,minimizer_kwargs)
niter为迭代次数
下面简单的介绍一下optimize的basinhopping方法求函数的最小值,这里仍需用到搜索局部最小值的算法。
这里以一个的二元函数为例,
from scipy import optimize
import numpy as np
def target(p):
x,y=p
return (x-1)*(x-2)*(x-3)*(x-4)*(x-5)*(x-6)*np.sin(y)
result = optimize.basinhopping(target,[1,1],niter=10,
minimizer_kwargs={"method":"L-BFGS-B",
})
print("最值点",result["x"],"\n最小值",result["fun"])
最值点 [1.33655347 1.57079634]
最小值 -16.900894327379042
附上两篇很好的文章
关于最小二乘法 ↩︎
L-BFGS-B算法 ↩︎