利用OpenCV检测特定颜色的物体
下载本文PDF 版本:链接:https://pan.baidu.com/s/1rXHySccGioWhNYLMmgi5BQ
提取码:73ey
1. 需求
利用摄像头实时检测一个红色的小球
2. 原料/前期准备
装有OpenCV的树莓派(OpenCV2.4.9)
树莓派摄像头模块(可以用罗技的USB摄像头代替)
3. 原理/实施步骤
a、最初的头文件和定义两个命名空间cvstd
#include
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
using namespace cv;
using namespace std;
b、为了实时检测小球的位置,我们首先需要打开树莓派的摄像头(PiCamera)
VideoCapture cap(0); //capture the video from web cam
if ( !cap.isOpened() ) // if not success, exit program
{
cout << "Cannot open the cam" << endl;
return -1;
}
如果使用的是USB摄像头,需要将VideoCapturecap(0)中的0改1。
如果opencv提供的cvCaptureFromCAM(0)函数无法找到Pi Cam但是换上普通usb摄像头之后就可以打开摄像头。运行起来就会发现找不到/dev/video0设备,但是树莓派官方自带的raspistill却能够用起来,这怎么回事呢?
树莓派中的camera module是放在/boot/目录下以固件的形式加载的,不是一个标准的v4l2的摄像头ko驱动,所以加载起来之后会找不到/dev/video0的设备节点,这是因为这个驱动是在底层的,v4l2这个驱动框架还没有加载,所以要在/etc/下面的modules-load.d/rpi-camera.conf里面添加一行bcm2835-v4l2,这句话意思是在系统启动之后会加载这个文件中模块名,这个模块会在树莓派系统的/lib/modules/xxx/xxx/xxx下面,添加之后重启系统,就会在/dev/下面发现video0设备节点了。这个文件名可能不是叫modules-load.d/rpi-camera.conf,也有可能直接就是/etc/modules,我用的是树莓派2,就是/etc/modules。
https://wiki.archlinux.org/index.php/Raspberry_Pi,这里讲了很多关于启动的问题,其中Raspberry Pi camera module这一章节就是说如何起camera。
修改/etc/modules,加上一行: bcm2835-v412
如下:
snd-bcm2835
bcm2835-v4l2
(v4l2是l 不是1 )
然后重启, ls -l /dev/video0,应该能找到。
c、从摄像头中实时取图
Mat imgOriginal;
bool bSuccess = cap.read(imgOriginal); // read a new frame from video
if (!bSuccess) //if not success, break loop
{
cout << "Cannot read a frame from video stream" << endl;
}
这里声明了一个Mat型的图像imgOriginal,之后有一个名为bSuccess的bool变量,用于判断取图是否成功。
d、识别红色
通过控制RGB通道很难找到红色的准确范围,于是我们选用HSV空间。HSV(Hue, Saturation,Value)是根据颜色的直观特性而创建的一种颜色空间,
H:色调 S:饱和度 V:明度
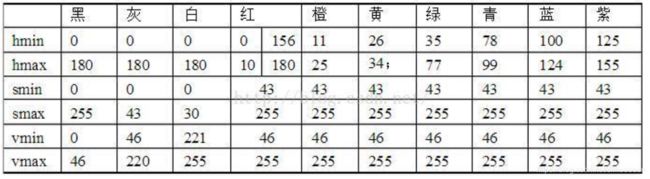
这是一个模糊范围,把部分紫色归为红色
|
|
imgHSV是将imgOriginal的RGB空间转换为HSV空间后的得到的图像,之后是分离HSV三通道。cvEqualizeHist函数用于将直方图均衡化,可以将比较淡的图像变换为比较深的图像(即增强图像的亮度及对比度)。cvMerge:把几个单通道图像合并为一个多通道图像,这样我们就获得了一个HSV空间的图像。并且通过调节HSV的值基本可以滤掉所有非红色区域。
e、二值化
二值化是将彩色图片转换文纯黑纯白,cvCvtColor可以将图片转为灰度图,但是不是二值图。CvThreshold是二值化函数。获得的图片原红色部分是白色,其余部分是黑色。
f、对红色区域画圆
|
|
首先用霍夫圆变换检测圆:cvHougeCircles函数有这样几个参数:第一个是输入图片,第二个是内存,第三个是方式、算法,第
四个是分辨率:设为1的时候分辨率相同,2分辨率为一般,第五个是让算法能明显区分的两个圆之间的最小距离。之后两个是阈值,
之后是能发现的圆的半径最大值和最小值。cvPoint是OpenCV中的数据类型,表示二维中的点。center是圆心。其实绘制圆心和绘
制圆是一回事,用的都是cvCircle函数,只是绘制的圆半径为0的时候,就变成了绘制圆心。
g、其他
由于不同时间光线条件不同,最好能有一个控制界面实时调节HSV使得识别红色的效果达到最好。OpenCV有专门的图形界面编写函数,写起来也很方便。
4.代码
|
|
5.一些注意事项
要先识别颜色再识别形状。
树莓派的摄像头存在打不开的情况,首选重启(reboot)。
窗口显示有延迟。
6.扫描二维码有惊喜
