使用RTThread和TouchGFX实现DIY数字仪表(二)——把TouchGFX移植到RTThread系统
目录:
1.使用RTThread和TouchGFX实现DIY数字仪表(一)——使用STM32CUBMX5.6移植touchGFX4.13
2.使用RTThread和TouchGFX实现DIY数字仪表(二)——把TouchGFX移植到RTThread系统
3.使用RTThread和TouchGFX实现DIY数字仪表(三)——获取温湿度传感器数据
4.使用RTThread和TouchGFX实现DIY数字仪表(四)——同步网络时间
5.使用RTThread和TouchGFX实现DIY数字仪表(五)——同步天气信息
6.使用RTThread和TouchGFX实现DIY数字仪表(六)——链接阿里云物联网平台
7.使用RTThread和TouchGFX实现DIY数字仪表(七)——使用MQTT.fx模拟手机设备进行M2M设备间通信
8.使用RTThread和TouchGFX实现DIY数字仪表(八)——开发微信小程序
9.使用RTThread和TouchGFX实现DIY数字仪表(九)——TouchGFX控件使用教程
实验平台:
硬件: 野火挑战者STM32F767 V1开发版
软件: TouchGFXDesigner v4.13和 STM32CubeMX v5.6.0,MDK v5.29,RT-Thread env 工具
实验前准备工作:
1.准备一套 野火挑战者STM32F767 开发版或其他核心板
2.安装 TouchGFXDesigner v4.13
3.安装STM32CubeMX v5.6.0和X_CUBE_TOUCHGFX软件包
4.安装 MDK v5.27以上版本
5.下载 RTThread源码包https://gitee.com/rtthread/rt-thread
下载:
代码持续更新中:github代码下载地址https://gitee.com/Aladdin-Wang/hellotouchGFX.git
联系作者:
关注公众号,加入技术交流群共同学习

移植RT-Thread的BSP模板:
1.学习RT-Thread系统(学过的可以跳过此步骤)
- 通读RT-Thread系统官方学习文档,https://www.rt-thread.org/document/site/
- 快速了解RT-Thread系统的内核,下载安装Env开发工工具
- 了解设备和驱动的使用方法:
2.移植BSP
- 参考官方使用 Env 创建 RT-Thread 项目工程的教程
- 选择 BSP
获取 RT-Thread 源代码后需要根据自己手上的开发板型号找到对应的 BSP,我实验所使用的是野火的STM32F767 V1开发板,所以可以选择别人已经做好的stm32f767-fire-challenger的DSP,在此DSP的基础上移植touchgfx,首先找到如下目录:…\rt-thread-v4.0.2\rt-thread\bsp\stm32\stm32f767-fire-challenger。 - 搭建项目框架
打开 Env 工具进入 stm32f767-fire-challenger 目录,运行scons --dist 命令。使用此命令会在 stm32f767-fire-challenger 目录下生成 dist 目录,这便是开发项目的目录结构,RT-Thread 源码位于项目文件夹内,仅包含stm32f767-fire-challenger 的 BSP,可以随意拷贝此 BSP 到任何目录下使用。

进入dist目录下,把工程里面的 stm32f767-fire-challenger压缩包拷贝到你的项目目录下待使用。 - 制作BSP
也可以自己重新制作对应自己板子的DSP,可以参考官方教程
- 选择 BSP
3.替换工程里CubeMX_Config文件夹
把RT-Thread 系统实现DIY数字仪表(一)工程的以下文件拷贝到BSP模版CubeMX_Config文件夹中,替换掉原先的文件,打开demo1重新生成工程。
4.更改操作系统的接口文件
拷贝OSWrappers.cpp,重命名为OSWrappers_RTT.cpp文件
![]()
更改代码
/**
******************************************************************************
* File Name : OSWrappers.cpp
******************************************************************************
* @attention
*
* © Copyright (c) 2020 STMicroelectronics.
* All rights reserved.
*
* This software component is licensed by ST under Ultimate Liberty license
* SLA0044, the "License"; You may not use this file except in compliance with
* the License. You may obtain a copy of the License at:
* www.st.com/SLA0044
*
******************************************************************************
*/
#include 5.新建touchgfx的应用例程文件
![]()
添加代码如下:
#include 6.移植qspi flash地址映射驱动文件
从上一个工程拷贝或新建以下文件到ports文件夹
qspi驱动代码如下:
/*
* Copyright (c) 2006-2018, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2018-11-27 zylx first version
*/
#include 触摸驱动gt9xx.c需要更改中断,使用rtthread的pin设备接口

7.编辑 board/KConfig


8.编辑 board/SConscript


9.新建 board/CubeMX_Config/SConscript
import os
import rtconfig
from building import *
cwd = GetCurrentDir()
# add general drivers
src = Split('''
Src/sample_touchgfx.c
Src/OSWrappers_RTT.cpp
Src/STM32DMA.cpp
Src/STM32TouchController.cpp
Src/TouchGFXGPIO.cpp
Src/TouchGFXConfiguration.cpp
Src/TouchGFXGeneratedHAL.cpp
Src/TouchGFXHAL.cpp
Src/app_touchgfx.c
''')
path = [cwd + '/Src']
path += [cwd + '/Middlewares/ST/touchgfx/framework/include']
if rtconfig.CROSS_TOOL == 'gcc':
src += [cwd + '/Middlewares/ST/touchgfx/lib/core/cortex_m7/gcc/libtouchgfx.a']
elif rtconfig.CROSS_TOOL == 'keil':
src += [cwd + '/Middlewares/ST/touchgfx/lib/core/cortex_m7/Keil/touchgfx_core.lib']
elif rtconfig.CROSS_TOOL == 'iar':
src += [cwd + '/Middlewares/ST/touchgfx/lib/core/cortex_m7/IAR8.x/touchgfx_core.a']
group = DefineGroup('TouchGFX_app', src, depend = [''], CPPPATH = path)
# add TouchGFX generated
genSrc = Glob('./Src/generated/fonts/src/*.cpp')
genSrc += Glob('./Src/generated/gui_generated/src/*/*.cpp')
genSrc += Glob('./Src/generated/images/src/*.cpp')
genSrc += Glob('./Src/generated/texts/src/*.cpp')
genPath = [cwd + '/Src/generated/fonts/include']
genPath += [cwd + '/Src/generated/gui_generated/include']
genPath += [cwd + '/Src/generated/images/include']
genPath += [cwd + '/Src/generated/texts/include']
group = group + DefineGroup('TouchGFX_generated', genSrc, depend = [''], CPPPATH = genPath)
# add TouchGFX resource
resSrc = Glob('./Src/generated/images/src/*/*.cpp')
group = group + DefineGroup('TouchGFX_resource', resSrc, depend = [''])
# add TouchGFX gui
guiSrc = Glob('./Src/gui/src/*/*.cpp')
guiPath = [cwd + '/Src/gui/include']
group = group + DefineGroup('TouchGFX_gui', guiSrc, depend = [''], CPPPATH = guiPath)
Return('group')
10.编辑libraries/STM32F7xx_HAL/SConscript

11.修改工程模版

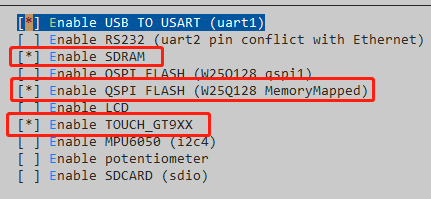
12.配置 Menuconfig
13.生成工程
使用scons --target=mdk5 命令生成 MDK工程

14.更改sdram_port.h
SDRAM的前2M空间用于touchgfx,后边的空间给rtthread系统分配内存使用。

15.添加触摸软件包
15.1 获取软件包
使用 gt9147 软件包需要在 RT-Thread 的包管理中选中它,具体路径如下:
RT-Thread online packages —>
peripheral libraries and drivers —>
touch drivers —>
gt9147: touch ic gt9147 for rt-thread
Version (latest) —>
15.2 使用软件包
gt9147 软件包初始化函数如下所示:
int rt_hw_gt9147_init(const char *name, struct rt_touch_config *cfg)
该函数需要由用户调用,函数主要完成的功能有,
- 设备配置和初始化(根据传入的配置信息,配置接口设备和中断引脚);
- 注册相应的传感器设备,完成 gt9147 设备的注册;
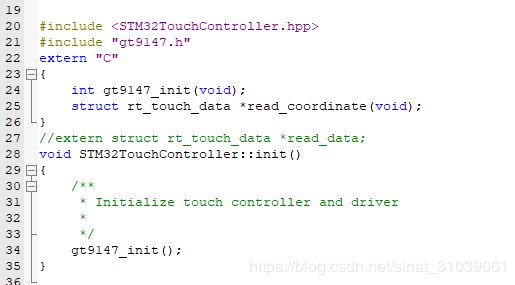
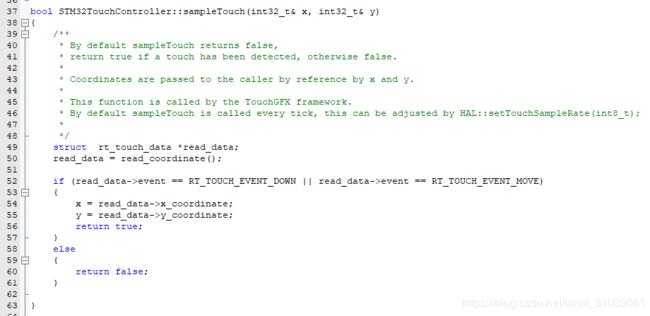
15.2 移植
开启软件I2C1

新建gtxx_ccollect.c文件,添加一下内容
#include 更改TouchGFXConfiguration.cpp文件如下
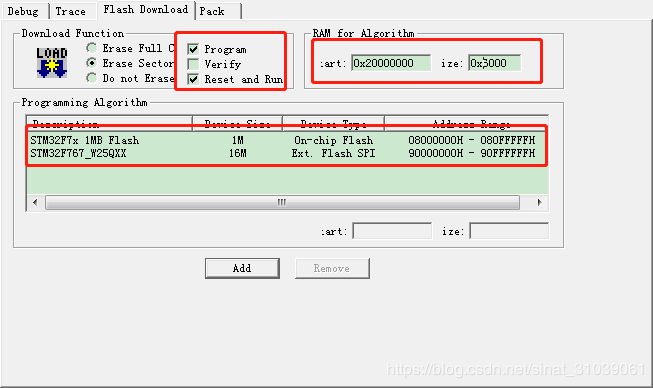
16.编译并下载运行
此工程地址
hellotouchGFX/ 3_STM32F767_RTThread_TouchGFX / 3_rtthread_TouchGFX_transplant / stm32f767-fire-challenger

还需改进的地方
1 qspi flash 地址映射驱动待整合
qspi flash 地址映射的驱动使用的依然是上一版的代码,没有使用rtthread的源码包里提供的qspi驱动,这个也可以整合进去
2 待制作成RTThread的TouchGFX软件包
TouchGFX本身就是一个与硬件和操作系统无关的软件包,完全可以整合成RTThread的一个软件包来使用,此次移植的依然是通过cubmx生成的TouchGFX工程,没有制作成RTThread的通用软件包
参考文章:https://blog.csdn.net/baidu_33429980/article/details/104248352