图像处理笔试面试题整理1
1、图像处理笔试面试题(1)
https://blog.csdn.net/m0_37407756/article/details/78800709
1.1、给定0-1矩阵,求连通域
二值图像分析最重要的方法就是连通区域标记,它是所有二值图像分析的基础,它通过对二值图像中白色像素(目标)的标记,让每个单独的连通区域形成一个被标识的块,进一步的我们就可以获取这些块的轮廓、外接矩形、质心、不变矩等几何参数。
连通域;连通区域的标记;
基于行程的标记(算法思路明白!;代码实现?);基于轮廓的标记(算法思路明白?;代码实现?)
2、图像处理算法工程师面试题
2.1、常用的图像空间
RGB/CMY/HSV/HSI/YUV(YCrCb)/Lab
HSL/HSB/Ycc/XYZ
https://blog.csdn.net/baidu_18891025/article/details/81742905
https://blog.csdn.net/skyereeee/article/details/7265415
HSV和HSI区别:
a 定义:
HSV:
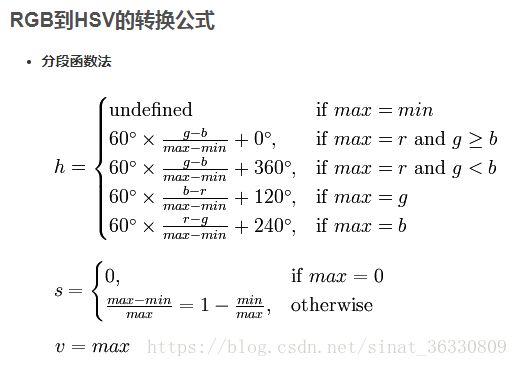
HSI:
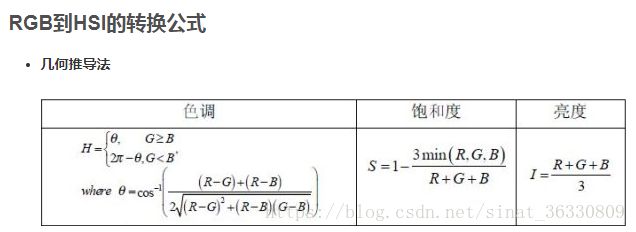
b 数学模型:
HSV: HSI:


https://blog.csdn.net/wxb1553725576/article/details/45827923
https://blog.csdn.net/jolinxia/article/details/27963675
YCrCb:
YCrCb即YUV, 其中“Y”表示明亮度(Luminance或Luma),也就是灰阶值;而“U”和“V” 表示的则是色度(Chrominance或Chroma),作用是描述影像色彩及饱和度,用于指定像素的颜色。
“色度”则定义了颜色的两个方面─色调与饱和度,分别用Cr和CB来表示。其中,Cr反映了RGB输入信号红色部分与RGB信号亮度值之间的差异。而CB反映的是RGB输入信号蓝色部分与RGB信号亮度值之间的差异。
采用YUV色彩空间的重要性是它的亮度信号Y和色度信号U、V是分离的。如果只有Y信号分量而没有U、V分量,那么这样表示的图像就是黑白灰度图像。彩色电视采用YUV空间正是为了用亮度信号Y解决彩色电视机与黑白电视机的兼容问题,使黑白电视机也能接收彩色电视信号。
肤色YCbCr颜色空间是一种常用的肤色检测的色彩模型,其中Y代表亮度,Cr代表光源中的红色分量,Cb代表光源中的蓝色分量。人的肤色在外观上的差异是由色度引起的,不同人的肤色分布集中在较小的区域内。
2.2.简述你熟悉的聚类算法并说明其优缺点。
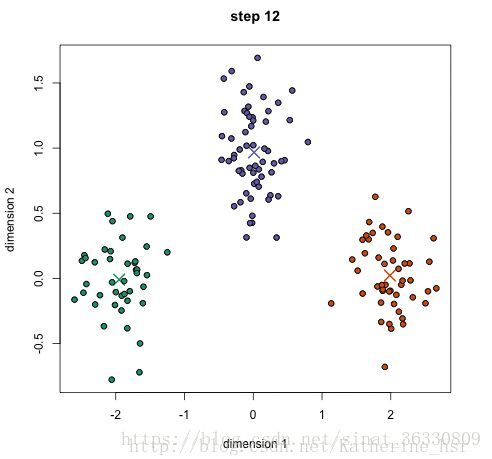
1. K-Means(K均值)聚类
https://blog.csdn.net/Katherine_hsr/article/details/79382249
https://blog.csdn.net/guoziqing506/article/details/59057427
优点:
1)原理简单,容易实现
2)可解释度较强
缺点:
1)K值很难确定
2)局部最优
3)对噪音和异常点敏感
4)需样本存在均值(限定数据种类)
5)聚类效果依赖于聚类中心的初始化
6)对于非凸数据集或类别规模差异太大的数据效果不好
7)K-Means的缺点在于对聚类中心均值的简单使用。
https://blog.csdn.net/baidu_33566882/article/details/79886598
2. 均值漂移聚类
https://blog.csdn.net/Katherine_hsr/article/details/79382249
优点:(1)不同于K-Means算法,均值漂移聚类算法不需要我们知道有多少类/组。
(2)基于密度的算法相比于K-Means受均值影响较小。
缺点:(1)窗口半径r的选择可能是不重要的。
3. 基于密度的聚类方法(DBSCAN)
密度:统计某一半径内的点数,直到找到最大点数位置。
4. 用高斯混合模型(GMM)的最大期望(EM)聚类
相对应K-Means假设数据点是圆形的,使用高斯混合模型(GMM)做聚类首先假设数据点是呈高斯分布的,高斯分布(椭圆形)给出了更多的可能性。我们有两个参数来描述簇的形状:均值和标准差。所以这些簇可以采取任何形状的椭圆形,因为在x,y方向上都有标准差。因此,每个高斯分布被分配给单个簇。
5. 凝聚层次聚类
6. 图团体检测(Graph Community Detection)
参考:
https://blog.csdn.net/Katherine_hsr/article/details/79382249
https://blog.csdn.net/abc200941410128/article/details/78541273?locationNum=1&fps=1
http://blog.chinaunix.net/uid-10289334-id-3758310.html
https://www.jianshu.com/p/2fa67f9bad60
2.3.请描述以下任一概念:SIFT/SURF LDA/PCA