OpenCV学习笔记(十六)角点检测
角点检测:
图像像素区域的兴趣点区域对于目标检测/目标跟踪有着重要的意义。当兴趣点周围存在方形区域时,最易形成角点。对于兴趣点检测,角点反应的是图像中局部最大值或者最小值的孤立点,可理解为 区域领域的小方块,存在于不同方向的主边缘处。窗口向任意方向的移动都会导致图像灰度的明显变换,形成的点集称为角点。
1. moravec角点
moravec角点是最早的角点检测算法之一,常用于立体匹配。moravec角点的原理是通过滑动窗口像素变化来实现角点检测,首先计算窗口像素的兴趣值,即以当前像素为中心像素点,取一个正方形窗口wxw,计算0°,45°,90°,135°四个方向灰度差的平方和,取其中的最小值作为兴趣像素点的兴趣值。
moravec角点检测器对每一个兴趣中心点进行划窗遍历,计算其相关8-领域方向的特征关系,窗口的变化可以取3x3,5x5,7x7。moravec角点检测与其他同类型角点检测相比有不足之处。
(1)非均匀性响应。很容易受到邻近特性的影响,一般在实验前,先进行平滑处理操作。moravec对45°响应很强,这是因为只考虑了每隔45°的方向变化,而没有在全部方向上。
(2)噪声响应。由于窗口函数是一个二值函数,不管像素点离中心点的距离是多少,均赋予一样的权重,致使其对应的噪声也有很强的响应。一般在进行角点检测前,先对图像兴趣区域采用较大的窗口或者先进行平滑操作。
程序体现:
#include
#include
#include
#include
#include
using namespace cv;
using namespace std;
Mat MoravecCorners(Mat srcImage, int kSize, int threshold)
{
Mat resMorMat = srcImage.clone();
//获取初始化参数信息
int r = kSize / 2;
const int nRows = srcImage.rows;
const int nCols = srcImage.cols;
int nCount = 0;
CvPoint *pPoint = new CvPoint[nRows * nCols];
//图像遍历
for (int i = r; i < srcImage.rows - r; i++)
{
for (int j = r; j < srcImage.cols - r; j++)
{
int wV1, wV2, wV3, wV4;
wV1 = wV2 = wV3 = wV4 = 0;
//计算水平方向窗内的兴趣值
for (int k = -r; k < r; k++)
wV1 += (srcImage.at(i, j + k) - srcImage.at(i, j + k + 1))*
(srcImage.at(i, j + k) - srcImage.at(i, j + k + 1));
//计算垂直方向窗内的兴趣值
for (int k = -r; k < r; k++)
wV2 += (srcImage.at(i + k, j) - srcImage.at(i + k + 1, j))*
(srcImage.at(i + k, j) - srcImage.at(i + k + 1, j));
//计算45方向窗内兴趣值
for (int k = -r; k < r; k++)
wV3 += (srcImage.at(i + k, j + k) - srcImage.at(i + k + 1, j + k + 1))*
(srcImage.at(i + k, j + k) - srcImage.at(i + k + 1, j + k + 1));
//计算135方向窗内的兴趣值
for (int k = -r; k < r; k++)
wV3 += (srcImage.at(i + k, j - k) - srcImage.at(i + k + 1, j - k - 1))*
(srcImage.at(i + k, j - k) - srcImage.at(i + k + 1, j - k - 1));
//选取其中的最小值作为该像素点的最终兴趣值
int value = min(min(wV1, wV2), min(wV3, wV4));
//若兴趣值大于阈值,则将点的坐标存入数组中
if (value > threshold)
{
pPoint[nCount] = cvPoint(j, i);
nCount++;
}
}
}
//绘制兴趣点
for (int i = 0; i < nCount; i++)
circle(resMorMat, pPoint[i], 5, Scalar(255, 255, 255), 1, 8, 0);
return resMorMat;
}
int main()
{
Mat srcImage = imread("D:\\Projects\\4.jpg");
if (!srcImage.data)
return -1;
Mat srcGray;
cvtColor(srcImage, srcGray, CV_BGR2GRAY);
Mat resMorMat = MoravecCorners(srcGray, 5, 10000);
imshow("srcImage", srcImage);
imshow("resMorMat", resMorMat);
waitKey(0);
return 0;
} 2. harris角点
harris角点在moravec角点的基础上进行了改进,对比moravec角点的连续平方求和,它引入了局部变化因子,利用高斯权重函数进行角点检测。
将实对称矩阵对角化处理后,对应项可以理解为旋转因子,经过对角化处理后,根据两个正交方向的变化分量计算其相应的特征值。如果两个特征值均较大且数值相当,则图像窗口在所有方向上的移动都将产生明显的灰度变化,可判断其将形成角点。如果仅有一个特征值较高且远远大于另一特征值,则可以得到相应边缘,其他情况下可以得到稳定区域。基于上述特征值特性,harris角点理论提出了相应的角点相应函数
C(i,j)=det(M)-k(trace(M))x(trace(M)); M是2x2的局部结构矩阵。k是常量因子,通常情况取值为0.04~0.06;对图像窗口内数据进行求和加权,实际上可以更好地刻画窗口中心特性。harris角点检测器还是目前应用最广泛的角点检测器之一,它检测率高,且可得到重复响应。harris角点检测算法的实现步骤:
(1) 利用水平与竖直差分算子对图像进行卷积操作,然后根据实对称矩阵M的组成,计算对应矩阵元素的值。
(2) 利用高斯函数对矩阵M进行平滑操作,得到新的M矩阵,步骤1和步骤2可以交换顺序,也可先对图像进行高斯滤波,再求相应方向上的梯度大小。
(3) 对每一像素和给定的领域窗口,计算局部特征结果矩阵M的特征值和相应的函数
C(i,j)=det(M)-k(trace(M))x(trace(M));
(4) 选取响应函数C的阈值,根据非极大值抑制原理,同时满足阈值及某领域内的局部极大值为候选角点。
利用cornerHarris()函数实现harris角点检测:
void cornerHarris(InputArray src, OutputArray dst, int blockSize, int apertureSize, double k, int borderType=BORDER_DEFAULT )
- src – Input single-channel 8-bit or floating-point image.
- dst – Image to store the Harris detector responses. It has the type CV_32FC1 and the same size as src .
- blockSize – Neighborhood size (see the details on cornerEigenValsAndVecs() ).
- apertureSize – Aperture parameter for the Sobel() operator.
- k – Harris detector free parameter. See the formula below. 公式中的k值
- boderType – Pixel extrapolation method. See borderInterpolate()
程序实现:
#include
#include
#include
#include
using namespace cv;
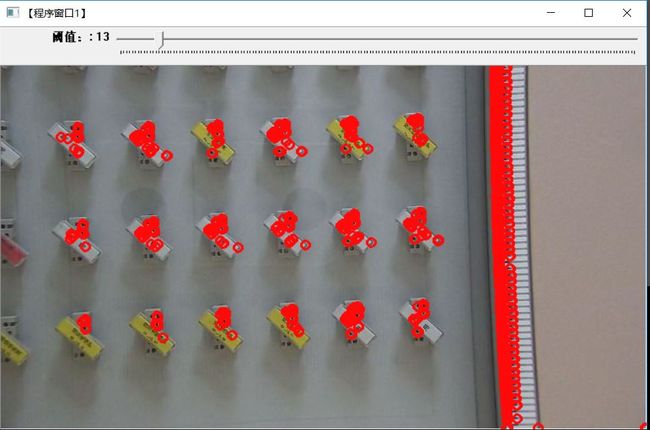
#define WINDOW_NAME1 "【程序窗口1】"
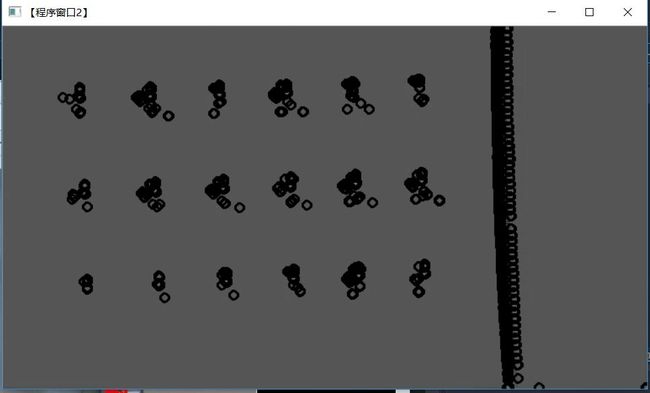
#define WINDOW_NAME2 "【程序窗口2】"
Mat g_srcImage, g_srcImage1, g_grayImage;
int thresh = 30;
int max_thresh = 175;
void on_CornerHarris(int, void*);
int main()
{
g_srcImage = imread("D:\\Projects\\3.jpg");
if (!g_srcImage.data)
return -1;
imshow("g_srcImage", g_srcImage);
g_srcImage1 = g_srcImage.clone();
cvtColor(g_srcImage1, g_grayImage, COLOR_BGR2GRAY);
namedWindow(WINDOW_NAME1, WINDOW_AUTOSIZE);
createTrackbar("阈值:", WINDOW_NAME1, &thresh, max_thresh, on_CornerHarris);
on_CornerHarris(0, 0);
waitKey(0);
return 0;
}
void on_CornerHarris(int, void*)
{
Mat dstImage;
Mat normImage;
Mat scaledImage;
dstImage = Mat::zeros(g_srcImage.size(), CV_32FC1);
g_srcImage1 = g_srcImage.clone();
//进行角点检测
cornerHarris(g_grayImage, dstImage, 2, 3, 0.04, BORDER_DEFAULT);
//归一化与转换
normalize(dstImage, normImage, 0, 255, NORM_MINMAX, CV_32FC1);
convertScaleAbs(normImage, scaledImage);
for (int j = 0; j < normImage.rows; j++)
{
for (int i = 0; i(j, i)>thresh + 80)
{
circle(g_srcImage1, Point(i, j), 5, Scalar(10, 10, 255), 2, 8, 0);
circle(scaledImage, Point(i, j), 5, Scalar(0, 10, 255), 2, 8, 0);
}
}
}
imshow(WINDOW_NAME1, g_srcImage1);
imshow(WINDOW_NAME2, scaledImage);
} 
3. Shi-Tomasi角点
a,b分别是M矩阵的两个特征值,Shi-Tomasi角点检测则选取了不同的角点响应函数,C(i,j)=min(a,b);
Shi-Tomasi角点检测划分相关一对一匹配对,依据图像的角点特征,图像灰度和位置信息,采用最大互相函数进行相似度计算,最终实现角点检测。OpenCV中利用goodFeaturesToTrack()实现角点检测算法。
void goodFeaturesToTrack(InputArray image, OutputArray corners, int maxCorners, double qualityLevel, double minDistance, InputArray mask=noArray(), int blockSize=3, bool useHarrisDetector=false, double k=0.04 )
- image – Input 8-bit or floating-point 32-bit, single-channel image.
- corners – Output vector of detected corners.
- maxCorners – Maximum number of corners to return. If there are more corners than are found, the strongest of them is returned.
- qualityLevel – Parameter characterizing the minimal accepted quality of image corners. The parameter value is multiplied by the best corner quality measure, which is the minimal eigenvalue (see cornerMinEigenVal() ) or the Harris function response (see cornerHarris()). The corners with the quality measure less than the product are rejected. For example, if the best corner has the quality measure = 1500, and the qualityLevel=0.01 , then all the corners with the quality measure less than 15 are rejected.
- minDistance – Minimum possible Euclidean distance between the returned corners. 取0.01
- mask – Optional region of interest. If the image is not empty (it needs to have the type CV_8UC1 and the same size as image ), it specifies the region in which the corners are detected. Mat()
- blockSize – Size of an average block for computing a derivative covariation matrix over each pixel neighborhood. SeecornerEigenValsAndVecs() . 3
- useHarrisDetector – Parameter indicating whether to use a Harris detector (see cornerHarris()) or cornerMinEigenVal(). false
- k – Free parameter of the Harris detector. 0.04
程序实现:
#include
#include
#include
using namespace cv;
using namespace std;
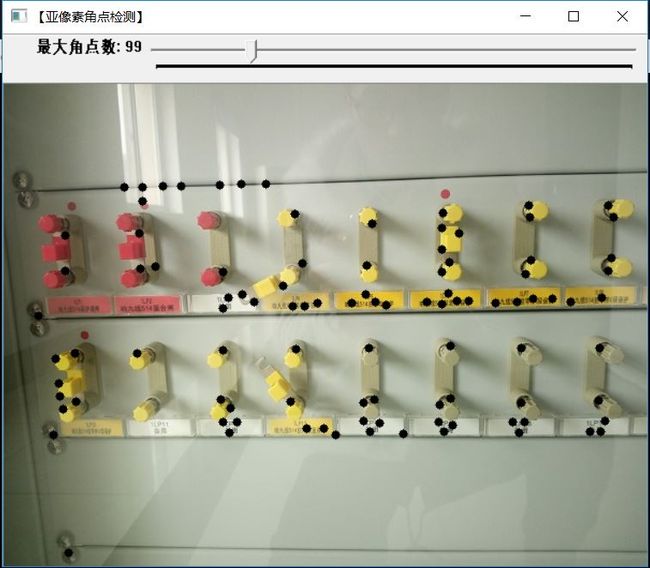
#define WINDOW_NAME "【亚像素角点检测】"
Mat g_srcImage, g_grayImage;
int g_maxCornerNumber = 33;
int g_maxTrackbarNumber = 500;
RNG g_rng(12345);
void on_GoodFeaturesToTrack(int, void*)
{
if (g_maxCornerNumber <= 1)
{
g_maxCornerNumber = 1;
}
vector corners;
double qualityLevel = 0.01;
double minDistance = 10;
int blockSize = 3;
double k = 0.04;
Mat copy = g_srcImage.clone();
goodFeaturesToTrack(g_grayImage, corners, g_maxCornerNumber, qualityLevel, minDistance, Mat(), blockSize, false, k);
int r = 4;
for (unsigned int i = 0; i < corners.size(); i++)
{
circle(copy, corners[i], r, Scalar(0,0,0),
-1, 8, 0);
}
imshow(WINDOW_NAME, copy);
}
int main()
{
g_srcImage = imread("D:\\Projects\\6.jpg");
if (!g_srcImage.data)
return -1;
cvtColor(g_srcImage, g_grayImage, COLOR_BGR2GRAY);
namedWindow(WINDOW_NAME, WINDOW_AUTOSIZE);
createTrackbar("最大角点数", WINDOW_NAME, &g_maxCornerNumber, g_maxTrackbarNumber, on_GoodFeaturesToTrack);
on_GoodFeaturesToTrack(0, 0);
waitKey(0);
return 0;
} 显示结果: