单片机 BMP280(GY-BM E/P 280模块)大气压强与温度传感器使用详解
单片机 BMP280大气压强与温度传感器使用详解
最近实习中一个项目要用到多种传感器,其中就包括BMP280模块,但是发现网上有用的资料非常少,只好从头看datasheet,使用过程中也算积累了相关的知识,分享给大家。在这里也给各位一个建议,使用一个芯片之前最好还是多看看datasheet,写datasheet的人就是制造芯片的人,他们的操作手册比任何人都有权威性。废话不多说,开始正题:
目录
- 单片机 BMP280大气压强与温度传感器使用详解
- 目录
- 模块引脚及相关参数
- 相关寄存器说明
- 数据处理基本过程
- 测量的基本流程
- STC8A8K64S4A12单片机程序(51单片机,STM32等改一下就行了)
- 目录
模块引脚及相关参数
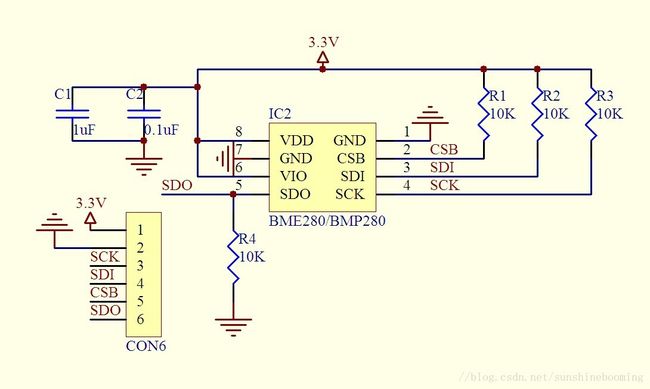
- 本次使用的模块型号为GY-BM E/P 280,淘宝上到处可以买到,这是对德国博世公司的BMP280芯片的一个应用封装(实物图片和封装基本电路都放在下面)。采用的主控芯片为STC8A8K64S4A12单片机,所以写的代码都是最底层的,比较适合小白看(代码贴在后面)。
- 引脚说明:
Pin1:VCC(3.3V供电)
Pin2:GND
Pin3:SCL(I2C通信模式时钟信号)
Pin4:SDA(I2C通信模式数据信号)
Pin5:CSB(SPI通信模式下用到的引脚,本次没用到,可以悬空)
Pin6:SDO(传感器地址控制位,接GND的时候I2C中器件地址为0xEC,接高电平为0xEC+ 1,本次接GND) - 传感器测试范围:
温度:-45℃~+85℃
大气压强:0~20000hPa(百帕) - 测量主要模式:
Sleep Mode:作电流达到uA级别,典型值为0.1uA,最大值为0.3uA,所有测量工作都停止。
Normal Mode: 正常工作,相关工作间隔时间可以通过寄存器控制。
Forced Mode:主控发起一次采集命令,传感器采集一次信号,然后进入Sleep Mode,等待下次唤起(本次没用到)。

相关寄存器说明
BMP280传感器内部所有寄存器及其地址如下图所示:

- 测量控制寄存器(ctrl_meas)(0xF4):
Bit7~Bit5:osrs_t[2:0] 控制温度采样模式,主要是采样数据的位数(位数越大,精度越高),具体配置如下(本次三位都配置为1,最大采样位数20Bit):

Bit4~Bit2:osrs_p[2:0] 控制大气压强采样模式,主要是采样数据的位数(位数越大,精度越高),具体配置如下(本次三位都配置为1,最大采样位数20Bit):

Bit1~Bit0:mode[1:0] 传感器工作模式控制,00为Sleep Mode,01/10为Forced Mode,11为 Normal Mode(本次配置为11)。 - 配置寄存器(config)(0xF5):
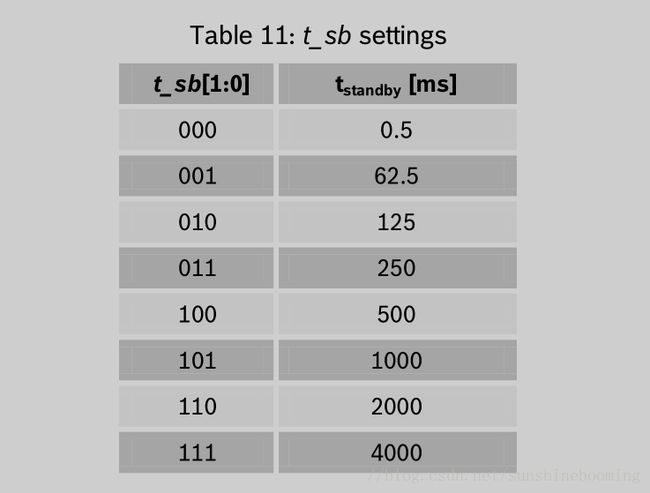
Bit7~Bit5:t_sb[2:0] 设置Normal Mode下的转换间隔时间,具体配置如下(本次配置为000,0.5ms转换一次)
Bit4~Bit2:filter[2:0] 设置传感器接收外界信号时的,前端滤波电路的滤波系数的,我也没仔细研究,就设置了个000,有兴趣的童鞋可以自己研究一下,datasheet上说和稳定度有关,可以有效减少外界环境的干扰:

Bit0:spi3w_en 与SPI模式有关,本次没用到,没设置。 - 身份编号寄存器(id)(0xD0):
寄存器内固定值为0x58,读取0xD0数据的时候,传感器返回0x58,代表身份辨认完毕。 - 复位寄存器(reset)(0xE0):
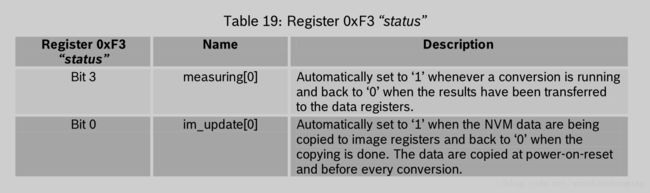
写入0xB6时,所有寄存器(除身份编号寄存器)数据全部清零。 - 状态寄存器(status)(0xF3):
具体定义如下,感兴趣的童鞋自己研究,本次没用到:
数据处理基本过程
该传感器是使用测量值和校准值(初始化中获得),通过公式计算得出的,相关公式在datasheet中已经贴出了,还给了样本数据(公式挺复杂的,建议先把公式抄到程序中,然后用样本数据传进去,测试一遍结果对不对,保证公式没抄错)。
数据处理中有个坑,请注意,就是读取补偿值数据的时候,下图的数据存储位是LSB/MSB,即数据是反过来存储的,低位字节在前,高位字节在后,所以处理数据的时候要注意,具体可以见我的代码中bmp280_MultipleReadTwo()函数:

公式的话,datasheet中也很模糊,就贴了一张自己代码中的,配合datasheet中的图片,凑合看吧:
long bmp280_GetValue(void)
{
long adc_T;
long adc_P;
long var1, var2, t_fine, T, p;
adc_T = bmp280_MultipleReadThree(BMP280_TEMP_ADDR);
adc_P = bmp280_MultipleReadThree(BMP280_PRESS_ADDR);
if(adc_P == 0)
{
return 0;
}
//Temperature
var1 = (((double)adc_T)/16384.0-((double)dig_T1)/1024.0)*((double)dig_T2);
var2 = ((((double)adc_T)/131072.0-((double)dig_T1)/8192.0)*(((double)adc_T)
/131072.0-((double)dig_T1)/8192.0))*((double)dig_T3);
t_fine = (unsigned long)(var1+var2);
T = (var1+var2)/5120.0;
//Pressure
var1 = ((double)t_fine/2.0)-64000.0;
var2 = var1*var1*((double)dig_P6)/32768.0;
var2 = var2 +var1*((double)dig_P5)*2.0;
var2 = (var2/4.0)+(((double)dig_P4)*65536.0);
var1 = (((double)dig_P3)*var1*var1/524288.0+((double)dig_P2)*var1)/524288.0;
var1 = (1.0+var1/32768.0)*((double)dig_P1);
p = 1048576.0-(double)adc_P;
p = (p-(var2/4096.0))*6250.0/var1;
var1 = ((double)dig_P9)*p*p/2147483648.0;
var2 = p*((double)dig_P8)/32768.0;
p = p+(var1+var2+((double)dig_P7))/16.0;
return p;
}测量的基本流程
- 初始化
包括I2C初始化(和传感器通信用),串口初始化(和上位机通信用,查看数据),传感器初始化,两个通信协议就不说了,不会的童鞋可以先去看看相关教程,下面主要说说传感器初始化:
- 数据全部清零:写数据0xB6到地址0xE0;
- 读芯片ID:读地址0xD0;
- 设置测量控制寄存器:写数据0xFF到地址0xF4(测量数据位20Bit,Normal Mode);
- 设置配置寄存器:写数据0x00到地址0xF5(测量间隔时间0.5ms,滤波器我没仔细看,感兴趣童鞋自己研究);
- 读取补偿值数据
- I2C循环读取传感器参数,代入公式计算获得结果,并且将结果通过串口输出到上位机。
STC8A8K64S4A12单片机程序(51单片机,STM32等改一下就行了)
注意串口通信引脚用的RXD:P3.0,TXD:P3.1(波特率9600,8位数据位,1位停止位,无奇偶校验位),I2C引脚用的SCL:P1.5,SDA:P1.4,芯片供电电源用的3.3V。
#include "intrins.h"
#include "stc8.h"
#define BMP280_ADDR 0xec
#define BMP280_TEMP_ADDR 0xfa
#define BMP280_PRESS_ADDR 0xf7
unsigned short dig_T1;
short dig_T2;
short dig_T3;
unsigned short dig_P1;
short dig_P2;
short dig_P3;
short dig_P4;
short dig_P5;
short dig_P6;
short dig_P7;
short dig_P8;
short dig_P9;
#define FOSC 11059200UL
#define BRT (256 - FOSC / 9600 / 32)
bit Uart1_BusyFlag;
char bufferPtr;
char Uart1Buffer[16];
void delay_ms(int x)
{
unsigned char i, j;
while(x-- > 0)
{
i = 15;
j = 90;
do
{
while (--j);
} while (--i);
}
}
void Uart1Int() interrupt 4 using 1
{
if(TI)
{
TI = 0;
Uart1_BusyFlag = 0;
}
if(RI)
{
RI = 0;
Uart1Buffer[bufferPtr++] = SBUF;
}
}
void Uart1Init()
{
SCON = 0x50;
TMOD = 0x20;
TL1 = BRT;
TH1 = BRT;
AUXR = 0x40;
TR1 = 1;
bufferPtr = 0;
Uart1_BusyFlag = 0;
}
void Uart1SendByte(char dat)
{
while(Uart1_BusyFlag);
Uart1_BusyFlag = 1;
SBUF = dat;
}
void Uart1SendStr(char *p)
{
while(*p)
{
Uart1SendByte(*p++);
}
}
void I2C_Wait()
{
while(!(I2CMSST & 0x40));
//Uart1SendStr("i2c wait...\r\n");
I2CMSST &= ~0x40;
}
void I2C_Start()
{
I2CMSCR = 0x01;
I2C_Wait();
}
void I2C_SendData(char dat)
{
I2CTXD = dat;
I2CMSCR = 0x02;
I2C_Wait();
}
void I2C_RecvACK()
{
I2CMSCR = 0x03;
I2C_Wait();
}
char I2C_RecvData()
{
I2CMSCR = 0x04;
I2C_Wait();
return(I2CRXD);
}
void I2C_SendACK()
{
I2CMSST = 0x00;
I2CMSCR = 0x05;
I2C_Wait();
}
void I2C_SendNAK()
{
I2CMSST = 0x01;
I2CMSCR = 0x05;
I2C_Wait();
}
void I2C_Stop()
{
I2CMSCR = 0x06;
I2C_Wait();
}
void I2C_Init()
{
P_SW2 = 0x80;
I2CCFG = 0xe0;
I2CMSST = 0x00;
}
void printHex(unsigned char i)
{
unsigned char j;
for(j = 0;j < 8;j++)
{
if(j == 4)
{
Uart1SendByte(' ');
}
if(i & 0x80)
{
Uart1SendByte('1');
}
else
{
Uart1SendByte('0');
}
i <<= 1;
}
Uart1SendByte(' ');
}
unsigned char bmp280_ReadByte(unsigned char addr)
{
unsigned char temp;
I2C_Start();
I2C_SendData(BMP280_ADDR);
I2C_RecvACK();
I2C_SendData(addr);
I2C_RecvACK();
I2C_Start();
I2C_SendData(BMP280_ADDR + 1);
I2C_RecvACK();
temp = I2C_RecvData();
I2C_SendNAK();
I2C_Stop();
return temp;
}
void bmp280_WriteByte(unsigned char addr, unsigned char dat)
{
I2C_Start();
I2C_SendData(BMP280_ADDR);
I2C_RecvACK();
I2C_SendData(addr);
I2C_RecvACK();
I2C_SendData(dat);
I2C_RecvACK();
I2C_Stop();
}
long bmp280_MultipleReadThree(unsigned char addr)
{
unsigned char msb, lsb, xlsb;
long temp = 0;
msb = bmp280_ReadByte(addr);
lsb = bmp280_ReadByte(addr + 1);
xlsb = bmp280_ReadByte(addr + 2);
temp = (long)(((unsigned long)msb << 12)|((unsigned long)lsb << 4)|((unsigned long)xlsb >> 4));
return temp;
}
short bmp280_MultipleReadTwo(unsigned char addr)
{
unsigned char msb, lsb;
short temp = 0;
lsb = bmp280_ReadByte(addr);
msb = bmp280_ReadByte(addr + 1);
temp = (short)msb << 8;
temp |= (short)lsb;
return temp;
}
void bmp280_Init(void)
{
unsigned char temp = 0;
//状态全部清零
bmp280_WriteByte(0xe0, 0xb6);
//读取ID的时候不知道为啥读不出来了,索性跳过去了
// temp = bmp280_ReadByte(0xd0);
// if(temp == 0x58)
// Uart1SendStr("bmp280 id is right...\r\n");
// else
// Uart1SendStr("bmp280 id is error...\r\n");
bmp280_WriteByte(0xf4, 0xff);
bmp280_WriteByte(0xf5, 0x00);
dig_T1 = bmp280_MultipleReadTwo(0x88);
dig_T2 = bmp280_MultipleReadTwo(0x8A);
dig_T3 = bmp280_MultipleReadTwo(0x8C);
dig_P1 = bmp280_MultipleReadTwo(0x8E);
dig_P2 = bmp280_MultipleReadTwo(0x90);
dig_P3 = bmp280_MultipleReadTwo(0x92);
dig_P4 = bmp280_MultipleReadTwo(0x94);
dig_P5 = bmp280_MultipleReadTwo(0x96);
dig_P6 = bmp280_MultipleReadTwo(0x98);
dig_P7 = bmp280_MultipleReadTwo(0x9A);
dig_P8 = bmp280_MultipleReadTwo(0x9C);
dig_P9 = bmp280_MultipleReadTwo(0x9E);
delay_ms(200);
}
// dig_T1 = 27504;
// dig_T2 = 26435;
// dig_T3 = -1000;
// dig_P1 = 36477;
// dig_P2 = -10685;
// dig_P3 = 3024;
// dig_P4 = 2855;
// dig_P5 = 140;
// dig_P6 = -7;
// dig_P7 = 15500;
// dig_P8 = -14600;
// dig_P9 = 6000;
// adc_T = 519888;
// adc_P = 415148;
long bmp280_GetValue(void)
{
long adc_T;
long adc_P;
long var1, var2, t_fine, T, p;
adc_T = bmp280_MultipleReadThree(BMP280_TEMP_ADDR);
adc_P = bmp280_MultipleReadThree(BMP280_PRESS_ADDR);
if(adc_P == 0)
{
return 0;
}
//Temperature
var1 = (((double)adc_T)/16384.0-((double)dig_T1)/1024.0)*((double)dig_T2);
var2 = ((((double)adc_T)/131072.0-((double)dig_T1)/8192.0)*(((double)adc_T)
/131072.0-((double)dig_T1)/8192.0))*((double)dig_T3);
t_fine = (unsigned long)(var1+var2);
T = (var1+var2)/5120.0;
var1 = ((double)t_fine/2.0)-64000.0;
var2 = var1*var1*((double)dig_P6)/32768.0;
var2 = var2 +var1*((double)dig_P5)*2.0;
var2 = (var2/4.0)+(((double)dig_P4)*65536.0);
var1 = (((double)dig_P3)*var1*var1/524288.0+((double)dig_P2)*var1)/524288.0;
var1 = (1.0+var1/32768.0)*((double)dig_P1);
p = 1048576.0-(double)adc_P;
p = (p-(var2/4096.0))*6250.0/var1;
var1 = ((double)dig_P9)*p*p/2147483648.0;
var2 = p*((double)dig_P8)/32768.0;
p = p+(var1+var2+((double)dig_P7))/16.0;
return p;
}
void main()
{
long temp;
unsigned char u8;
I2C_Init();
Uart1Init();
bmp280_Init();
ES = 1;
EA = 1;
while(1)
{
temp = bmp280_GetValue();
Uart1SendStr("test : ");
u8 = (temp >> 24) & 0xff;
printHex(u8);
u8 = (temp >> 16) & 0xff;
printHex(u8);
u8 = (temp >> 8) & 0xff;
printHex(u8);
u8 = (temp) & 0xff;
printHex(u8);
Uart1SendStr("\r\n\r\n\r\n");
delay_ms(500);
}
}