UWB中TOF测距法的公式推导
UWB中TOF测距法的公式推导
UWB常用测距方法有两种:飞行时间测距法(TOF)和到达时间差法(TDOA)。这里说一下TOF。网上很多地方都给了公式,但是缺了过程推导,这里补上,有像我一样纠结公式是怎么来的同学可以参考。
TOF
飞行时间法(Time of Flight,TOF)是一种双向测距技术,它通过测量UWB信号在基站与标签之间往返的飞行时间来计算距离。根据数学关系,一点到已知点的距离为常数,那么这点一定在以已知点为圆心,以该常数为半径的圆上。有两个已知点,就有两个交点。以三个已知点和距离作三个圆,他们交于同一个点,该点就是标签的位置。
TOF定位方式需要基站和标签往返通信,因此就造成了TOF功耗大大提高,续航时间相对较短.
TOF又分为两种:单边双向测距和双边双向测距。
单边双向测距
单边双向测距(Single-sided Two-way Ranging: SS-TWR)是对单个往返消息时间上的简单测量,设备A主动发送数据到设备B,设备B返回数据响应设备A。如下图所示:
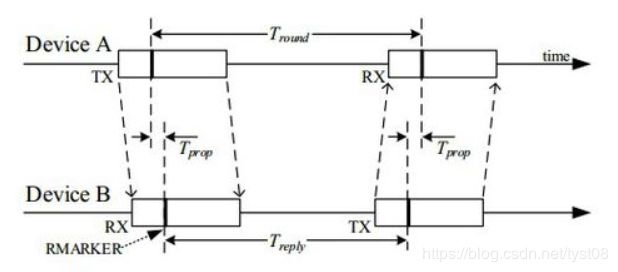
单边双向测距的流程是这样的:设备A(Device A)主动发送(TX)数据,同时记录发送时间戳,设备B(Device B)接收到之后记录接收时间戳;延时 T r e p l y T_{reply} Treply 之后,设备B发送数据,同时记录发送时间戳,设备A接收数据,同时记录接收时间戳。
所以可以拿到两个时间差数据,设备A的时间差 T r o u n d T_{round} Tround 和设备B的时间差 T r e p l y T_{reply} Treply ,最终得到无线信号的飞行时间 T p r o p T_{prop} Tprop 如下:
T p r o p = 1 2 ( T r o u n d − T r e p l y ) T_{prop} = \frac{1}{2}(T_{round}-T_{reply}) Tprop=21(Tround−Treply)
两个差值时间都是基于本地的时钟计算得到的,本地时钟误差可以抵消,但是不同设备之间会存在微小的时钟偏移,假设设备A和B的时钟偏移分别为 e A e_A eA 和 e B e_B eB,则飞行时间测量值为:
T ^ p r o p = 1 2 [ T r o u n d ( 1 + e A ) − T r e p l y ( 1 + e B ) ] \hat{T}_{prop} = \frac{1}{2}[T_{round}(1+e_A)-T_{reply}(1+e_B)] T^prop=21[Tround(1+eA)−Treply(1+eB)]
于是测距误差如下:
E r r o r = T ^ p r o p − T p r o p = 1 2 ( T r o u n d ⋅ e A − T r e p l y ⋅ e B ) = 1 2 T r e p l y ( e A − e B ) + T p r o p ⋅ e A Error = \hat{T}_{prop} - T_{prop} = \frac{1}{2}(T_{round}\cdot e_A-T_{reply}\cdot e_B) = \frac{1}{2}T_{reply}(e_A-e_B) + T_{prop}\cdot e_A Error=T^prop−Tprop=21(Tround⋅eA−Treply⋅eB)=21Treply(eA−eB)+Tprop⋅eA
因为 T r e p l y > > T p r o p T_{reply} >> T_{prop} Treply>>Tprop, 所以可以忽略后一项,得到
E r r o r = T ^ p r o p − T p r o p ≈ 1 2 T r e p l y ( e A − e B ) Error = \hat{T}_{prop} - T_{prop} \approx \frac{1}{2}T_{reply}(e_A-e_B) Error=T^prop−Tprop≈21Treply(eA−eB)
由此可以看出,随着 T r e p l y T_{reply} Treply 和时钟偏移的增加,会增加飞行时间的误差,从而使得测距不准确。因此单边双向测距(SS-TWR)并不常用,但对于特定的应用,如果对于精度要求不是很高,但是需要更短的测距时间可以采用。注意 T r e p l y T_{reply} Treply 不仅仅是设备B接收到发送的时间,也包括装载数据和发送数据耗费的时间(UWB除了支持定位之外,也可以传输数据,标准可以装载128字节,扩展模式可以装载1024字节数据)。
双边双向测距
双边双向测距(Double-sided Two-way Ranging)是单边双向测距的一种扩展测距方法,记录了两个往返的时间戳,最后得到飞行时间,虽然增加了响应的时间,但会降低测距误差。
双边双向测距分为两次测距,设备A主动发起第一次测距消息,设备B响应,当设备A收到数据之后,再返回数据,最终可以得到如下四个时间差: T r o u n d 1 T_{round1} Tround1、 T r e p l y 1 T_{reply1} Treply1、 T r o u n d 2 T_{round2} Tround2、 T r e p l y 2 T_{reply2} Treply2,如下图所示:

双边双向测距飞行时间计算方法:
由单边双向测距方法可得
T p r o p = 1 2 ( T r o u n d 1 − T r e p l y 1 ) T_{prop} = \frac{1}{2}(T_{round1}-T_{reply1}) Tprop=21(Tround1−Treply1)
T p r o p = 1 2 ( T r o u n d 2 − T r e p l y 2 ) T_{prop} = \frac{1}{2}(T_{round2}-T_{reply2}) Tprop=21(Tround2−Treply2)
所以
T r o u n d 1 × T r o u n d 2 = ( 2 T p r o p + T r e p l y 1 ) ( 2 T p r o p + T r e p l y 2 ) = 4 T p r o p 2 + 2 T p r o p ( T r e p l y 1 + T r e p l y 2 ) + T r e p l y 1 T r e p l y 2 T_{round1} \times T_{round2} = (2T_{prop}+T_{reply1})(2T_{prop}+T_{reply2}) \\ = 4T_{prop}^2+2T_{prop}(T_{reply1}+T_{reply2})+T_{reply1}T_{reply2} Tround1×Tround2=(2Tprop+Treply1)(2Tprop+Treply2)=4Tprop2+2Tprop(Treply1+Treply2)+Treply1Treply2
T r o u n d 1 × T r o u n d 2 − T r e p l y 1 T r e p l y 2 = 4 T p r o p 2 + 2 T p r o p ( T r e p l y 1 + T r e p l y 2 ) = T p r o p ( 4 T p r o p + 2 T r e p l y 1 + 2 T r e p l y 2 ) = T p r o p ( T r o u n d 1 + T r o u n d 2 + T r e p l y 1 + T r e p l y 2 ) T_{round1} \times T_{round2} - T_{reply1}T_{reply2} = 4T_{prop}^2+2T_{prop}(T_{reply1}+T_{reply2}) \\ = T_{prop}(4T_{prop}+2T_{reply1}+2T_{reply2}) \\ = T_{prop}(T_{round1} + T_{round2} + T_{reply1} + T_{reply2}) Tround1×Tround2−Treply1Treply2=4Tprop2+2Tprop(Treply1+Treply2)=Tprop(4Tprop+2Treply1+2Treply2)=Tprop(Tround1+Tround2+Treply1+Treply2)
于是可以得到如下计算 T p r o p T_{prop} Tprop 的公式:
T p r o p = T r o u n d 1 × T r o u n d 2 − T r e p l y 1 × T r e p l y 2 T r o u n d 1 + T r o u n d 2 + T r e p l y 1 + T r e p l y 2 T_{prop} = \frac{T_{round1} \times T_{round2} - T_{reply1} \times T_{reply2}}{T_{round1} + T_{round2} + T_{reply1} + T_{reply2}} Tprop=Tround1+Tround2+Treply1+Treply2Tround1×Tround2−Treply1×Treply2
以上测距的机制是非对称的测距方法,因为他们对于响应时间不要求是相同的。下面分析双边双向测距飞行时间的误差:
T ^ p r o p = T r o u n d 1 ( 1 + e A ) × T r o u n d 2 ( 1 + e B ) − T r e p l y 1 ( 1 + e B ) × T r e p l y 2 ( 1 + e A ) T r o u n d 1 ( 1 + e A ) + T r o u n d 2 ( 1 + e B ) + T r e p l y 1 ( 1 + e B ) + T r e p l y 2 ( 1 + e A ) = ( 4 T p r o p 2 + 2 T p r o p ( T r e p l y 1 + T r e p l y 2 ) ) ( 1 + e A ) ( 1 + e B ) 4 T p r o p + 2 ( T r e p l y 1 + T r e p l y 2 ) + ( 2 T p r o p + T r e p l y 1 + T r e p l y 2 ) ( e A + e B ) = 2 ( 1 + e A ) ( 1 + e B ) ( 1 + e A ) + ( 1 + e B ) T p r o p \hat{T}_{prop} = \frac{T_{round1}(1+e_A) \times T_{round2}(1+e_B) - T_{reply1}(1+e_B) \times T_{reply2}(1+e_A)}{T_{round1}(1+e_A) + T_{round2}(1+e_B) + T_{reply1}(1+e_B) + T_{reply2}(1+e_A)} \\ = \frac{(4T_{prop}^2+2T_{prop}(T_{reply1}+T_{reply2}))(1+e_A)(1+e_B)} {4T_{prop}+2(T_{reply1}+T_{reply2})+(2T_{prop}+T_{reply1}+T_{reply2})(e_A+e_B)}\\ =\frac{2(1+e_A)(1+e_B)}{(1+e_A)+(1+e_B)}T_{prop} T^prop=Tround1(1+eA)+Tround2(1+eB)+Treply1(1+eB)+Treply2(1+eA)Tround1(1+eA)×Tround2(1+eB)−Treply1(1+eB)×Treply2(1+eA)=4Tprop+2(Treply1+Treply2)+(2Tprop+Treply1+Treply2)(eA+eB)(4Tprop2+2Tprop(Treply1+Treply2))(1+eA)(1+eB)=(1+eA)+(1+eB)2(1+eA)(1+eB)Tprop
于是
T p r o p = ( 1 + e A ) + ( 1 + e B ) 2 ( 1 + e A ) ( 1 + e B ) T ^ p r o p T_{prop} = \frac{(1+e_A)+(1+e_B)}{2(1+e_A)(1+e_B)}\hat{T}_{prop} Tprop=2(1+eA)(1+eB)(1+eA)+(1+eB)T^prop
E r r o r = T ^ p r o p − T p r o p = ( 1 − ( 1 + e A ) + ( 1 + e B ) 2 ( 1 + e A ) ( 1 + e B ) ) T ^ p r o p = e A + e B + 2 e A e B 2 ( 1 + e A ) ( 1 + e B ) T ^ p r o p Error = \hat{T}_{prop} - T_{prop} = \left(1-\frac{(1+e_A)+(1+e_B)}{2(1+e_A)(1+e_B)}\right)\hat{T}_{prop} \\ = \frac{e_A+e_B+2e_A e_B}{2(1+e_A)(1+e_B)}\hat{T}_{prop} Error=T^prop−Tprop=(1−2(1+eA)(1+eB)(1+eA)+(1+eB))T^prop=2(1+eA)(1+eB)eA+eB+2eAeBT^prop
因为 e A < < 1 e_A << 1 eA<<1, e B < < 1 e_B << 1 eB<<1,略去高次项,可得
E r r o r ≈ e A + e B 2 T ^ p r o p Error \approx \frac{e_A+e_B}{2}\hat{T}_{prop} Error≈2eA+eBT^prop
由此可以看出,误差仅与钟漂和飞行时间有关。
假设一个使用场景:使用20ppm的晶体,UWB的工作距离范围为300m,则无线信号空中飞行时间大概为1 μ s \mu s μs,误差为
20 × 1 0 − 6 × 1 × 1 0 − 6 = 20 × 1 0 − 12 = 20 p s 20 \times 10^{-6} \times 1 \times 10^{-6} = 20 \times 10^{-12} = 20ps 20×10−6×1×10−6=20×10−12=20ps,时钟误差是在ps级别的,换算为距离之后仅为6mm。
注意:响应时间是不需要相等的,也就是 T r e p l y 1 T_{reply1} Treply1 不一定要等于 T r e p l y 2 T_{reply2} Treply2,这样对于MCU系统的处理带来了很多便利。
若双边双向测距方法响应时间对称,也就是 T r e p l y 1 T_{reply1} Treply1 和 T r e p l y 2 T_{reply2} Treply2 相等,飞行时间计算方法如下:
T p r o p = 1 4 ( T r o u n d 1 − T r e p l y 1 + T r o u n d 2 − T r e p l y 2 ) T_{prop} = \frac{1}{4}(T_{round1}-T_{reply1}+T_{round2}-T_{reply2}) Tprop=41(Tround1−Treply1+Tround2−Treply2)
这种方法比较简单,只是需要一些时间戳做加减法,但其难点在于,怎么保证 T r e p l y 1 T_{reply1} Treply1 和 T r e p l y 2 T_{reply2} Treply2 是相等的。
此种方法的误差分析如下:
T ^ p r o p = 1 4 [ T r o u n d 1 ( 1 + e A ) − T r e p l y 1 ( 1 + e B ) + T r o u n d 2 ( 1 + e B ) − T r e p l y 2 ( 1 + e A ) ] \hat{T}_{prop} = \frac{1}{4}\left[T_{round1}(1+e_A)-T_{reply1}(1+e_B)+T_{round2}(1+e_B)-T_{reply2}(1+e_A)\right] T^prop=41[Tround1(1+eA)−Treply1(1+eB)+Tround2(1+eB)−Treply2(1+eA)]
E r r o r = T ^ p r o p − T p r o p = 1 4 [ ( T r o u n d 1 − T r e p l y 2 ) e A + ( T r o u n d 2 − T r e p l y 1 ) e B ] = 1 4 [ 2 ( e A + e B ) T p r o p + ( e A − e B ) ( T r e p l y 1 − T r e p l y 2 ) ] Error = \hat{T}_{prop} - T_{prop} = \frac{1}{4}\left[(T_{round1}-T_{reply2})e_A +(T_{round2}-T_{reply1})e_B\right] \\ =\frac{1}{4}\left[2(e_A+e_B)T_{prop} +(e_A-e_B)(T_{reply1}-T_{reply2})\right] Error=T^prop−Tprop=41[(Tround1−Treply2)eA+(Tround2−Treply1)eB]=41[2(eA+eB)Tprop+(eA−eB)(Treply1−Treply2)]
因为 T r e p l y 1 − T r e p l y 2 > > T p r o p T_{reply1}-T_{reply2} >> T_{prop} Treply1−Treply2>>Tprop,可忽略 T p r o p T_{prop} Tprop 项,从而得到
E r r o r ≈ 1 4 ( e A − e B ) ( T r e p l y 1 − T r e p l y 2 ) Error \approx \frac{1}{4}(e_A-e_B)(T_{reply1}-T_{reply2}) Error≈41(eA−eB)(Treply1−Treply2)
可见此误差与响应时间差成正比。