ROS 编译错误以及解决方案
错误一:Could NOT find Bullet (missing: BULLET_DYNAMICS_LIBRARY
BULLET_COLLISION_LIBRARY BULLET_MATH_LIBRARY BULLET_SOFTBODY_LIBRARY
BULLET_INCLUDE_DIR)

解决办法:
sudo apt-get install libbullet-dev错误二:Could NOT find SDL (missing: SDL_LIBRARY SDL_INCLUDE_DIR)

解决办法:
sudo apt-get install libsdl1.2-dev错误三:Could NOT find SDL_image (missing: SDL_IMAGE_LIBRARIES
SDL_IMAGE_INCLUDE_DIRS)

解决办法:
sudo apt-get install libsdl-image1.2-dev错误四:Could not find a package configuration file provided by "move_base_msgs"
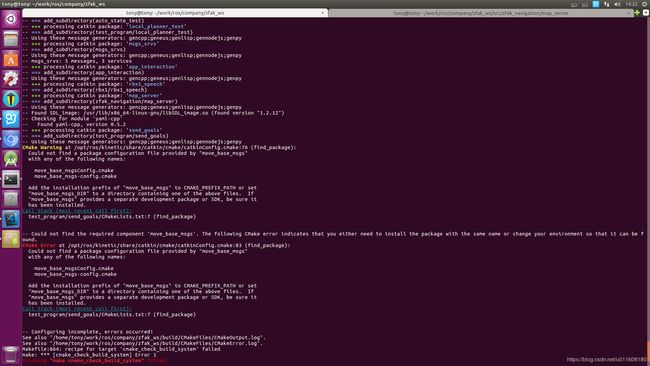
解决办法:
sudo apt-get install ros-kinetic-move-base-msgs错误五:No package 'orocos-bfl' found

解决办法:
sudo apt-get install ros-kinetic-bfl错误六:Could not find libg2o!

解决办法:
sudo apt-get install ros-kinetic-libg2o错误七: Unable to find SuiteSparse
解决办法:
sudo apt-get install libsuitesparse-dev错误八:No package 'yaml-cpp' found
sudo apt-get install libyaml-cpp-dev错误九:Could not find a package configuration file provided by "cv_bridge" with
sudo apt-get install ros-kinetic-cv-bridge错误十:Could not find the required component 'image_transport'.
sudo apt-get install ros-kinetic-image-transport错误十一:Could not find the required component 'pcl_conversions'.
sudo apt-get install ros-kinetic-pcl-conversions错误十二: Could not find the required component 'pcl_ros'.
sudo apt-get install ros-kinetic-pcl-ros
错误十三:Could not find the required component 'angles'.
sudo apt-get install ros-kinetic-angles错误十四:Could not find the required component 'diagnostic_updater'.
sudo apt-get install ros-kinetic-diagnostic-updater错误十五:Could not find a package configuration file provided by "roslint"
sudo apt-get install ros-kinetic-roslint错误十六:Could not find the required component 'laser_geometry'.
sudo apt-get install ros-kinetic-laser-geometry错误十七:Could not find the required component 'map_msgs'.
sudo apt-get install ros-kinetic-map-msgs错误十八:Could not find the required component 'interactive_markers'.
sudo apt-get install ros-kinetic-interactive-markers错误十九:Could not find the required component 'tf_conversions'.
sudo apt-get install ros-kinetic-tf-conversions错误二十:Could not find the required component 'ecl_threads'.
sudo apt-get install ros-kinetic-ecl-threads