机器人模型导入MATLAB(二):导入Simscape URDF格式
一.准备
URDF(Unified Robot Description Format)是ROS中使用的一种机器人描述文件,它以HTML的形式定义一个机器人。包含的内容有:连杆、关节名称,运动学参数、动力学参数、可视化模型、碰撞检测模型等。
ROS目前提供了SolidWorks转URDF的插件,叫做sw_urdf_exporter。
官网下载地址:http://wiki.ros.org/sw_urdf_exporter。
安装好SolidWorks后,再安装这个插件,重新打开SW,查看插件你就会发现里面多了一个叫做SW2URDF的插件,勾选启用此插件。

二.机器人模型导出URDF
1.SW模型建立与配置
(1)对每个连杆组件须建立零件坐标系。
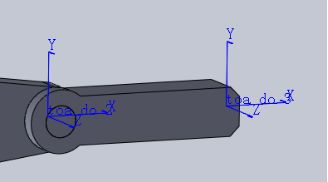
(2)在装配体中把装配体的坐标系和全局坐标系一致或在装配体中建立装配体的基座坐标系,也可不建后续自动生成。
(3)将机器人的各零部件,按照DH坐标系的全零位姿排列好并添加正确的配合关系。
2.导出
(1)点击 工具 —>File—>Export as URDF
定义关节类型,可选项有:
revolute - 旋转关节,其极限位置由 upper and lower limits 决定
continuous - 旋转关节,无位置限制
prismatic - 滑动关节,其极限位置由 upper and lower limits 决定
fixed - 虚拟关节,关节不可运动
floating - 六自由度关节
planar - 平面关节
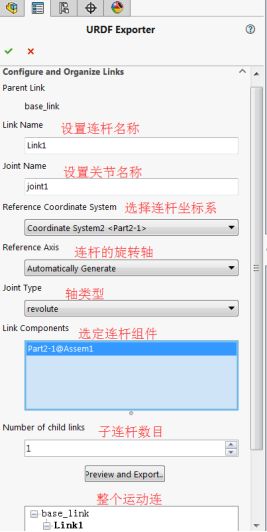
(2)可以设置每个连杆、关节名称、参考坐标系(可以采用自己预先定义的坐标系,也可以自动生成),选择轴类型,选择对应的连杆组件,设置运动连等等。
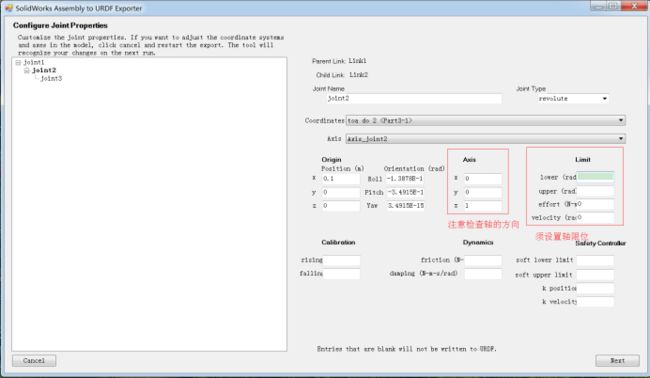
(3)检查各参数是否正确。
a.SW中建立的参考轴只有方向而没有正负。如果Axis=(0,0,1)则运动方向沿Joint frame Z轴正方向,在导出之前需检查每个轴的方向是否正确(若参考坐标系是之前设置的零件坐标系,则轴的方向均为 [0 0 1])。
b.如果是prismatic或revolute这种非continuous类型的关节,需要在Limit中设置关节限位,否则在ROS中使用时会出现警告。
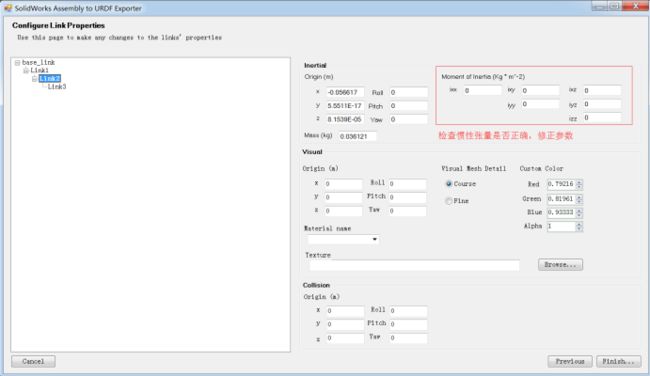
c.Texture 选项处可以添加零部件的纹理信息文件,也可不添加。
d.质心处惯性张量,质心均基于零件坐标系描述,质心坐标系对齐零件坐标系;检查这些参数是否一致。也可在此处输入数据,修改为新的参数。
e.检查质量等其他参数是否正确。
之后,便会生成一个package,包含launch文件,每个连杆STL文件,URDF文件。
三.导入Simulink :Simscape Multibody
MATLAB指令:smimport('xxxxxxx.urdf')
注:此处使用版本MATLAB 2017b