Dynamic Routing Between Capsule论文阅读笔记
-
- Intro
- Main
- CapsNet
- 结构概述
- image to ReLU Conv1 to PrimaryCaps
- PrimaryCaps to DigitCaps & Dynamic Routing
- Dynamic Routing算法流程
- Reconstruction
- Total loss
- 实验
- CapsNet与tradictional neuron的对比
- 总结
- 代码阅读
- CapsNet
Intro
由于涉及比较多的公式,而github不支持MathJax或者LaTeX,所以如果想获得更好的阅读体验请安装chrome插件GitHub with MathJax,或者有更好的方法恳请告知。
本文记录了阅读论文《Dynamic Routing Between Capsules》以及naturomics的代码的理解与收获,若有错误欢迎指出([email protected]),转载请注明出处。
若想通过视频快速了解,可以看看下面两个链接,讲得比较生动易理解(不过还是推荐读论文):
- Capsule Networks教程(by Aurélie)
- 用Tensorflow实现Capsule(by Aurélie)
Main
CapsNet
结构概述
论文仅仅是提出了一个可行的方案,目的是为了证明Capsule这个思想的可行性,目前还较为粗略,有很多改进空间。论文有两个比较突出的创新点:
- 采用 routing-by-agreement mechainsm 决定两层capsule之间的连接以及参数 cij c i j 的更新方式
- 用向量输出替代标量输出
下图是论文中所采用的神经网络结构:
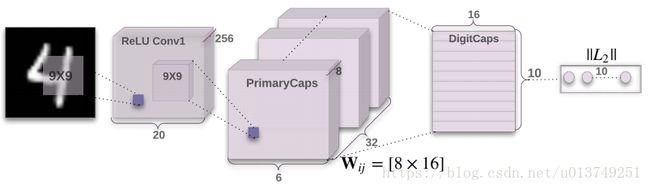
看完这幅图应该大概能理解CapsNet的结构。它先是对图像用了两次卷积得到PrimaryCaps,然后用Routing-By-Agreement Mechanism得到DigitCaps。最后,求DigitCaps中的10个向量的长度,比如说最长的是第4个向量,那么就意味着CapsNet识别出当前输入的图片是数字4。
看到这里,何为Capsule?在PrimaryCaps中,它指的是长度为8的向量,共6*6*32个。而在DigitCaps中,它指的是16维的向量,共10个。所以Capsule其实对应着传统神经网络的scalar,只是一个scalar能够表征的信息太少了,所以将其扩展为向量,这样它就能够表示更多的信息。有人说,之所以提出这种想法是因为Hinton观察到人的大脑不是像神经网络一样严格分层,而是一簇簇神经元作为一个整体的。
CapsNet的结构是Image(input)->Conv1->PrimaryCaps->DigitCaps(output)->Reconstruction,下文也会按照这个顺序来讲解
在下文中,若 i 指 layerl l a y e r l 的某一个capsule ,那么 j 就是指 layerl+1 l a y e r l + 1 的某一个capsule。
image to ReLU Conv1 to PrimaryCaps
论文使用的是MNIST手写识别数据集,每张图片的大小都是28*28。
流程:
image(28 * 28)
images → →
Conv(num_outputs=256, kernel_size=9, stride=1, padding='VALID') + ReLU→ → Conv1(256 * 20 * 20)Conv1 → →
Conv(num_outputs=256, kernel_size=9, stride=2, padding="VALID") + ReLU→ → PrimaryCaps(256 * 6 * 6)
这里可能会有人奇怪,这里不过是用了256个filter产生256个feature map,图片为什么会画成(32 * 8 * 6 * 6)的形式,这是因为后面的路由算法是将一个长度为8的向量当做一个整体来计算的。
PrimaryCaps to DigitCaps & Dynamic Routing
- 下面讲解从PrimaryCaps → → DigitCaps的计算过程,其中主要应用了Routing-By-Agreement Mechanism
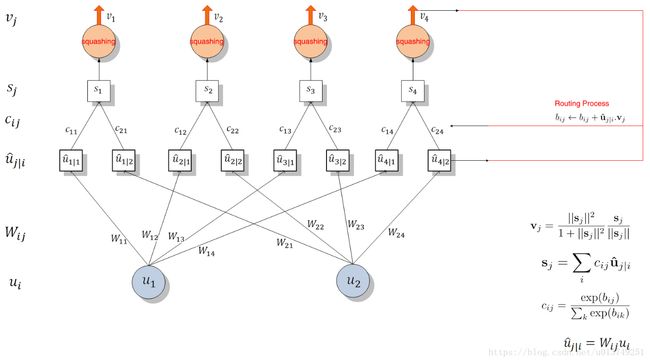
一张图表示他们之间的关系:

注意,图片中仅展示了一个 vj,j∈(1,10) v j , j ∈ ( 1 , 10 ) 的求解过程,其他 vj v j 同理可得。
公式
- ui(i∈[6∗6∗32]) u i ( i ∈ [ 6 ∗ 6 ∗ 32 ] ) : 表示PrimaryCaps的某个8D的Capsule
- û j|i u ^ j | i : 论文中称之为低一层的capsules的“prediction vectors”
- bij b i j : 初始化为0,更新方法是 bij←bij+û j|ivj b i j ← b i j + u ^ j | i v j 。 其中 aij=û j|ivj a i j = u ^ j | i v j 表示 capsulej c a p s u l e j (即 vj v j )跟 capsulei c a p s u l e i 的prediction vector(即 û j|i u ^ j | i )的agreement(契合度)。值越大,表示两个向量的方向越相似,两个向量所表示的性质越相近。由 cij c i j 的公式知, bij b i j 的值越大(意味着两个向量的方向越相似), cij c i j 的值越大, capsulei c a p s u l e i 越倾向于将信息传送给 capsulej c a p s u l e j 。
- cij c i j : 由动态路由算法更新的coupling coefficients,并且 ∑icij=1 ∑ i c i j = 1 (此时 j j 为某确定的常数)
- sj s j : capsulej c a p s u l e j 的所有input之和。
- squash() s q u a s h ( ) : 非线性函数,保留了向量的方向,使长的向量越长,短的向量越短,并且长度都压缩在0-1之内
- vj v j : 由dynamic routing计算出来的PrimaryCaps的output。在文章中就是指最后的输出DigitCaps,共有10个(因为有10个数字,即10类)Capsule。每个capsule有16维,每一维都代表着数字的某些属性(粗细、倾斜程度等等)。向量的长度代表了当前输入是类 j j 的概率。
Dynamic Routing算法流程
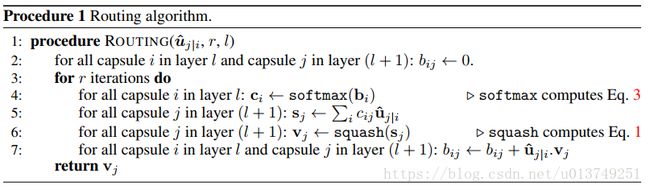
整个过程如下所示(图片来自naturomics的ppt):
Reconstruction
CapsNet使用Reconstruction作为Regularization。其做法是将DigitCaps的十个输出向量 vj v j 中长度最长的向量,经过3个FC层(结构如下图所示)重构出原来的图像,通过对比重构的图像和原图像的差异(pixel-wise),得到reconstruction loss。用来重构的这三个FC层一起称为Decoder。

Total loss
由于有多个类的存在,所以不能用cross entropy,论文中使用了SVM中常用的损失函数Margin loss来代替
Margin loss
![]()
- k: class k, k∈[1,10] k ∈ [ 1 , 10 ]
- m+=0.9,m−=0.1 m + = 0.9 , m − = 0.1 (自己设定)
λ λ (比例系数,用来调整两者的比重):
The λ down-weighting of the loss for absent digit classes stops the initial learning from shrinking the lengths of the activity vectors of all the digit capsules. We use λ = 0.5.
如果输入的数字图像是class k,那么 Tk=1 T k = 1
- | 示例 | 输入输出 | ‖vk‖ ‖ v k ‖ | Lk L k |
| – | ——————— | —– | —– |
| TT | 输入数字k 预测结果为数字k | 比较大 | 比较小 |
| TF | 输入数字k 预测结果非数字k | 比较小 | 比较大 |
| FT | 输入非数字k 预测结果为数字k | 比较大 | 比较大 |
| FF | 输入非数字k 预测结果非数字k | 比较小 | 比较小 | - 可以看出,在假阳性和假阴性的示例中, Lk L k 的值比较大。
Reconstruction loss
计算原图像与重构的图像在对应的pixel位置上的值之差,求和得到Reconstruction loss
将原图像x(28, 28)reshape成orgin(784)
再将重构的图像decoded(784)
squared = square(decoded - orgin)
reconstruction_loss = mean(squared)即
最后:
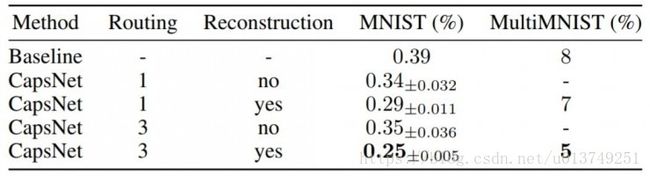
实验
MNIST
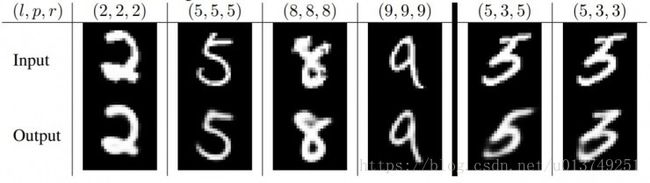
l=label, p=prediction, r=reconstruction。下面最右的两列展示了模式是如何在5和3之间纠结的。而其它列表明了模型不仅保留了图片的细节并且平滑了噪声。
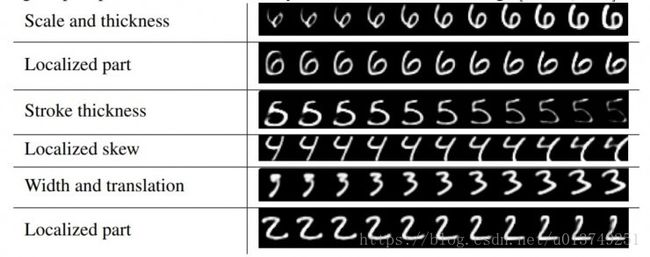
Dimension perturbations
改变DigitCaps中的capsule的16维中的一维,这个被改变的capsule所重构出来的图像也会有所变化(比如笔画变得更粗)。这表明了capsule学习到了entity,并且每一维都代表着entity的某个feature,具有很强的解释性。
MultiMNIST
L指的是两个label,R指的是两个用于重构的图像。上面白色的是input image,下面红绿色重叠的是重构的图像。
如下图所示,实验把两个激活程度最高的capsule对应的数字作为识别结果,据此对识别到的图像元素进行了重构。对于左边中识别正确的样本(L指真实标签,R指激活程度最高的两个胶囊对应的标签),可以看到由于不同的capsule各自工作,在一个识别结果中用到的特征并不会影响到另一个识别结果,不受重叠的影响(或者说重叠部分的特征可以复用)。
另一方面,每个capsule还是需要足够多的周边信息支持,而不是一味地认为重叠部分的特征就需要复用。下图中间是选了一个高激活程度的capsule和一个低激活程度capsule的结果(* R表示其中一个数字既不是真实标签也不是识别结果,L仍然为真实标签)。可以看到,在(5,0)图中,关注“7”的capsule并没有找到足够多的“7”的特征,所以激活很弱;(1,8)图中也是因为没有“0”的支持特征,所以重叠的部分也没有在“0”的capsule中用第二次。
最右R:P:(2, 7)指的是预测结果是2,7,然后将代表2和7的capsule重构。

CapsNet与tradictional neuron的对比
(图片来自naturomics):

总结
为什么要用Routing-by-agreement?
传统的CNN里面,conv后面是max-pooling层,但是max-pooling只保留了唯一一个最活跃的特征,而Routing则有效得多。
Routing-by-agreement有以下几个好处:
- 由于上一层的capsule会逐渐倾向于将信息传到下一层与它相似的capsule,这样就能够给下一层capsule干净清晰的信号,减少噪声,从而更快地学习到entity
- 通过追溯当前被激活的capsule的信号传输路径,我们可以操控part-whole中的part,并且清楚知道哪一个part属于哪一个entity(比如说识别一个由三角形和长方形组成的房屋,在 layerl l a y e r l 可能有个capsule是检测三角形,有个capsule检测长方形,则在 layerl+1 l a y e r l + 1 有能够得到检测房屋的capsule。此为ppart-whole的关系)。
- 可以很容易地解析重叠的entity,比如重叠的数字识别。
the capsules in the first layer try to predict what the second layer capsules will output
代码阅读
代码link
由于代码基本上都是按照文章思路来写的,所以不重复讲,而是介绍主要的结构。
目录
CapsNet-Tensorflow
- capsLayer.py
定义了capsLayer的实现方法。
由于论文中提及的capsLayer有两种:
PrimaryCaps(without routing)
DigitCaps(with routing)
所以该文件里面也包含了这两种Layer的实现方式
另外,该文件还有:
routing
squash
- capsNet.py
定义了CapsNet类
包含:
build_arch() # 定义结构
loss() # 定义loss
- config.py
超参数设定
- main.py
程序入口
- utils.py
用于读取MNIST的数据主要代码:
class CapsNet(object):
def __init__(self, is_training=True):
self.graph = tf.Graph()
with self.graph.as_default():
if is_training: # 如果是在训练过程中
self.X, self.labels = get_batch_data() # 获取training data和label
self.Y = tf.one_hot(self.labels, depth=10, axis=1, dtype=tf.float32) # 对label做onehot
self.build_arch() # 搭建CapsNet的结构
self.loss() # 定义loss
self._summary()
# t_vars = tf.trainable_variables()
self.global_step = tf.Variable(0, name='global_step', trainable=False)
self.optimizer = tf.train.AdamOptimizer() # 使用AdamOptimizer
self.train_op = self.optimizer.minimize(self.total_loss, global_step=self.global_step) # var_list=t_vars)
elif cfg.mask_with_y: # 如果是已经训练完
self.X = tf.placeholder(tf.float32,
shape=(cfg.batch_size, 28, 28, 1))
self.Y = tf.placeholder(tf.float32, shape=(cfg.batch_size, 10, 1))
self.build_arch()
else:
self.X = tf.placeholder(tf.float32,
shape=(cfg.batch_size, 28, 28, 1))
self.build_arch()
tf.logging.info('Seting up the main structure')
def build_arch(self):
with tf.variable_scope('Conv1_layer'):
# Conv1, [batch_size, 20, 20, 256]
conv1 = tf.contrib.layers.conv2d(self.X, num_outputs=256,
kernel_size=9, stride=1,
padding='VALID')
assert conv1.get_shape() == [cfg.batch_size, 20, 20, 256]
# Primary Capsules layer, return [batch_size, 1152, 8, 1]
with tf.variable_scope('PrimaryCaps_layer'):
primaryCaps = CapsLayer(num_outputs=32, vec_len=8, with_routing=False, layer_type='CONV')
caps1 = primaryCaps(conv1, kernel_size=9, stride=2)
assert caps1.get_shape() == [cfg.batch_size, 1152, 8, 1]
# DigitCaps layer, return [batch_size, 10, 16, 1]
with tf.variable_scope('DigitCaps_layer'):
digitCaps = CapsLayer(num_outputs=10, vec_len=16, with_routing=True, layer_type='FC')
self.caps2 = digitCaps(caps1)
# Decoder structure in Fig. 2
# 1. Do masking, how:
with tf.variable_scope('Masking'):
# a). calc ||v_c||, then do softmax(||v_c||)
# [batch_size, 10, 16, 1] => [batch_size, 10, 1, 1]
self.v_length = tf.sqrt(tf.reduce_sum(tf.square(self.caps2),
axis=2, keep_dims=True) + epsilon)
self.softmax_v = tf.nn.softmax(self.v_length, dim=1)
assert self.softmax_v.get_shape() == [cfg.batch_size, 10, 1, 1]
# b). pick out the index of max softmax val of the 10 caps
# [batch_size, 10, 1, 1] => [batch_size] (index)
self.argmax_idx = tf.to_int32(tf.argmax(self.softmax_v, axis=1))
assert self.argmax_idx.get_shape() == [cfg.batch_size, 1, 1]
self.argmax_idx = tf.reshape(self.argmax_idx, shape=(cfg.batch_size, ))
# Method 1.
if not cfg.mask_with_y:
# c). indexing
# It's not easy to understand the indexing process with argmax_idx
# as we are 3-dim animal
masked_v = []
for batch_size in range(cfg.batch_size):
v = self.caps2[batch_size][self.argmax_idx[batch_size], :]
masked_v.append(tf.reshape(v, shape=(1, 1, 16, 1)))
self.masked_v = tf.concat(masked_v, axis=0)
assert self.masked_v.get_shape() == [cfg.batch_size, 1, 16, 1]
# Method 2. masking with true label, default mode
else:
# self.masked_v = tf.matmul(tf.squeeze(self.caps2), tf.reshape(self.Y, (-1, 10, 1)), transpose_a=True)
self.masked_v = tf.multiply(tf.squeeze(self.caps2), tf.reshape(self.Y, (-1, 10, 1)))
self.v_length = tf.sqrt(tf.reduce_sum(tf.square(self.caps2), axis=2, keep_dims=True) + epsilon)
# 2. Reconstructe the MNIST images with 3 FC layers
# [batch_size, 1, 16, 1] => [batch_size, 16] => [batch_size, 512]
with tf.variable_scope('Decoder'):
vector_j = tf.reshape(self.masked_v, shape=(cfg.batch_size, -1))
fc1 = tf.contrib.layers.fully_connected(vector_j, num_outputs=512)
assert fc1.get_shape() == [cfg.batch_size, 512]
fc2 = tf.contrib.layers.fully_connected(fc1, num_outputs=1024)
assert fc2.get_shape() == [cfg.batch_size, 1024]
self.decoded = tf.contrib.layers.fully_connected(fc2, num_outputs=784, activation_fn=tf.sigmoid)
def loss(self):
# 1. The margin loss
# [batch_size, 10, 1, 1]
# max_l = max(0, m_plus-||v_c||)^2
max_l = tf.square(tf.maximum(0., cfg.m_plus - self.v_length))
# max_r = max(0, ||v_c||-m_minus)^2
max_r = tf.square(tf.maximum(0., self.v_length - cfg.m_minus))
assert max_l.get_shape() == [cfg.batch_size, 10, 1, 1]
# reshape: [batch_size, 10, 1, 1] => [batch_size, 10]
max_l = tf.reshape(max_l, shape=(cfg.batch_size, -1))
max_r = tf.reshape(max_r, shape=(cfg.batch_size, -1))
# calc T_c: [batch_size, 10]
# T_c = Y, is my understanding correct? Try it.
T_c = self.Y
# [batch_size, 10], element-wise multiply
L_c = T_c * max_l + cfg.lambda_val * (1 - T_c) * max_r
self.margin_loss = tf.reduce_mean(tf.reduce_sum(L_c, axis=1))
# 2. The reconstruction loss
orgin = tf.reshape(self.X, shape=(cfg.batch_size, -1))
squared = tf.square(self.decoded - orgin)
self.reconstruction_err = tf.reduce_mean(squared)
# 3. Total loss
# The paper uses sum of squared error as reconstruction error, but we
# have used reduce_mean in `# 2 The reconstruction loss` to calculate
# mean squared error. In order to keep in line with the paper,the
# regularization scale should be 0.0005*784=0.392
self.total_loss = self.margin_loss + cfg.regularization_scale * self.reconstruction_err