PRML第三章笔记
这是关于PRML第三章的学习笔记。主要从内容思想的理解,具体的理论推导需要结合原文以及概率论的知识。这一章主要讲述线性回归,解释了下面主要问题:
1.线性基函数模型中过拟合问题处理方式;
2.如何分别从频率角度和贝叶斯角度理解模型复杂度问题?
3.贝叶斯线性回归的顺序性质怎么直观地理解(里面有一副图非常直观)?
4. 在贝叶斯方法中,如何评估模型证据,以及回归参数w的有效性(是否有效、有效个数)?特别地,对于拟合参数的不同维度,什么时候靠近训练数据集的最大似然估计,什么时候更加倾向于最初的先验假设(也就训练数据集对该参数的作用有限)?
主要讲述两个方向:
第一、频率角度的回归模型,以及通过损失函数比较模型,通过加入正则项防止过拟合
第二、贝叶斯角度的回归模型,以及通过模型证据比较模型,贝叶斯本身可以防止过拟合
(贝叶斯的模型证据是通过数据计算的,不用把数据集分开,留出验证集)
一、线性基函数模型:也就是把最常见的x的线性组合变成的基函数的线性组合:
(1)线性基函数模型介绍
![]()

这里的![]() 是基函数,可以是非线性的函数,代表非线性变换。在许多模式识别的实际应⽤中,我们会对原始的数据变量进⾏某种固定形式的预处理或者特征抽取。如果原始变量由向量x组成,那么特征可以⽤基函数{φj(x)}来表⽰。
是基函数,可以是非线性的函数,代表非线性变换。在许多模式识别的实际应⽤中,我们会对原始的数据变量进⾏某种固定形式的预处理或者特征抽取。如果原始变量由向量x组成,那么特征可以⽤基函数{φj(x)}来表⽰。
(2)常见基函数形式

1,最大似然等价于最小平方损失 (L=LS):在条件⾼斯噪声分布的情况下,线性模型的似然函数的最⼤化等价于平⽅和误差函数的最⼩化
(1)概率建模
在Gaussian 零均值情况下,Linear model从频率主义出发的MLE就是 Least square:
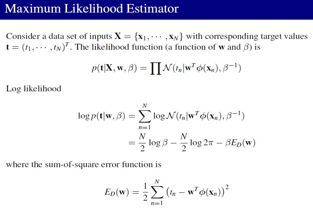
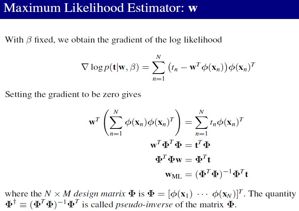
(2)求参数w,和beta的解(梯度等于0)
最小2乘的解就是广义逆矩阵乘输出值:
Gaussian的precision也可以计算出来:

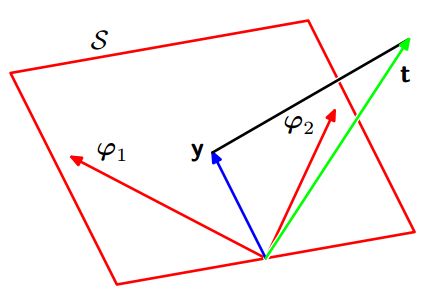
2,几何理解
数据N个,基的维度M小于N ,y=(y1…yn).T,t=(t1,…tn).T ,而y=wTϕ(x),所以y在ϕ所张成的空间里,均方误差最小实质上是t与y的距离最小,也就是当且仅当t垂直于ϕ所张成的平面的时候。也就是说y就是t在ϕ空间中的正交投影。
如果M>N时候,很可能导致矩阵ϕTϕ是奇异的(我猜的,待考虑),这时候ϕTϕ中元素值都很大,导致wML也很大,称之为degeneracies(退化)。
3,序列学习 or 在线学习:就是随机梯度下降的方法

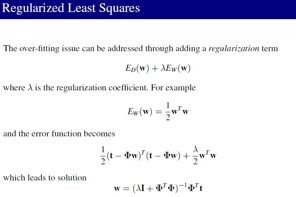
4,正则化:
频率主义会导致 过拟和,加入正则,得到的最小2乘解:
正则参数对model结果的影响:

消除过拟和,正则的几何解释:

5,多输出
两种方案:
(1)输出视作互相独立的,那么对于每一个输出都有一套基
(2)所有的输出都使用相同的基,只是使用不同的w来计算。
(常用第二种情况)
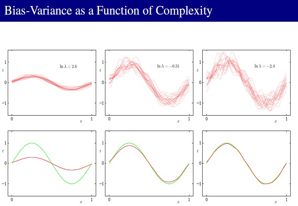
二、偏置-方差分解
正则化需合适的λ ,第三章从两个角度解释这个问题,一个是频率派的角度,一个是贝叶斯派的角度。 两个学派的区别在于是否视概率参数是随机变量。(这里是用频率学思想来解决过拟合问题。即:平衡偏差和方差)
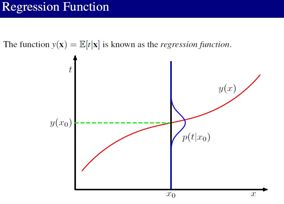
(1)平⽅损失函数:讨论回归问题的决策论时,我们考虑了不同的损失函数。⼀旦我们知道了条件概率分布p(t | x),每⼀种损失函数都能够给出对应的最优预测结果。使⽤最多的⼀个选择是平⽅损失函数,此时最优的预测由条件期望(记作h(x))给出,即:

(2)损失函数的分解:
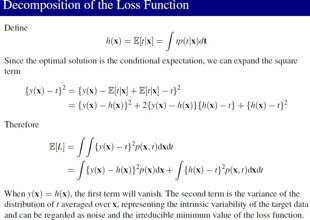

第二项与y(x)无关,即与w无关,仅仅与数据本身有关,因此不考虑;第一项为了使之最小,当然要使y(x)=h(x),然而问题是数据量是有限的,必然导致y(x)无法完整的描述数据,也就是没法精确的求出回归函数h(x),因此会存在一定的差。
贝叶斯观点认为,y(x)之所以无法精确的逼近h(x)是由于w是随机量而不是固定值,也就是说w本身就是不确定的。 而频率派是这样描述的,首先有一个无限大的数据集,我们每次只能选择其中一个样本来处理,因此一个样本导致一个w(对该数据集而言w本身是未知的常量),这才是y(x)无法等于h(x)的原因。 为了描述这种现象,使E(L)的第一项对所有的数据集积分:
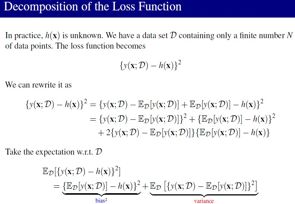
学习到的模型和真实的模型的期望由2部分组成:
1–> Bias 2–> Variance。Bias表示的是学习到的模型和真实模型的偏离程度,Variance表示的是学习到的模型和它自己的期望的偏离程度。
(3)Variance小的情况下,Bias就大,Variance大的情况下,Bias就小,我们就要tradeoff它们。正则项在控制 Bias 和 Variance,使他们可以平衡:

以上就是频率学派的观点。其最大的局限性在于确定合适的模型复杂度的问题。这个问题不能简单地通过最⼤化似然函数来确定,因为这总会产⽣过于复杂的模型和过拟合现象。独⽴的额外数据能够⽤来确定模型的复杂度,但是这需要较⼤的计算量,并且浪费了有价值的数据。
三、贝叶斯线性模型
1,参数分布:
(1)先验分布与后验分布
贝叶斯线性模型认为参数W是随机变量,先验分布是高斯分布,对应的后验分布也是高斯分布(具体推导见第二章)。

(2)贝叶斯如何控制模型复杂度:贝叶斯就是求后验概率最大化
后验分布关于w的最⼤化等价于对平⽅和误差函数加上⼀个⼆次正则项进⾏最⼩化。其中λ = α/β,所以他可以防止过拟合。
(3)顺序性质:如果数据点是顺序到达的,那么任何⼀个阶段的后验概率分布都可以看成后续数据点的先验。
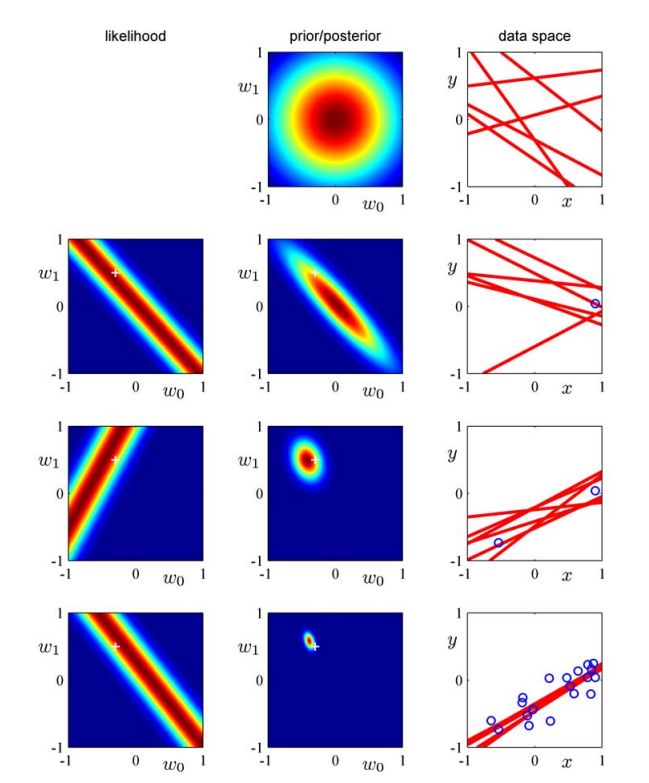
数据产生:f=-0.3+0.5x,x在[-1,1]间均匀采样,然后叠加一个N(0,0.2)噪声。
模型:先验这里写图片描述 α=2
序列化过程:第一个数据t1,p(w∣t1)∝p(t1∣w)p(w)
来第二个数据,若整体考虑:
p(w∣t1,t2)∝p(t1,t2∣w)p(w)∝p(t2∣w)p(t1∣w)p(w)∝p(t2∣w)p(w∣t1)
可见如果我们把第一个数据后的后验概率视作为先验,那么新的后验概率就正比于“新的先验”和“新的似然概率”之积。
如图:(r=1, c=2)表示没有数据时先验概率的图;(1,3)表示数据空间中的六个线性模型,该模型参数w取样于(1,2);(2,1)中‘+’表示真实的w值,考虑lnp(t|w)=A-B(t1−w0−w1x1)2这其实是这个公式的图,当(t1=w0+w1x1)显然就是最中间的那条直线;(2,2)中就是(1,2)*(2,1)的结果;(2,3)‘。’表示所观察的数据,可以看到新采样到的w保证了直线都在该数据周围。以下类推,当可观测数据越来越多的时候,模型就越来越精确。
2,预测分布
预测分布定义为:(定义,贝叶斯的参数是一个随机变量,所以预测值关于w求积分)

这里观察数据x永远作为条件,因此被忽略。注意到积分中的两个式子都是高斯,根据PRML式子(2.115)结果有: 
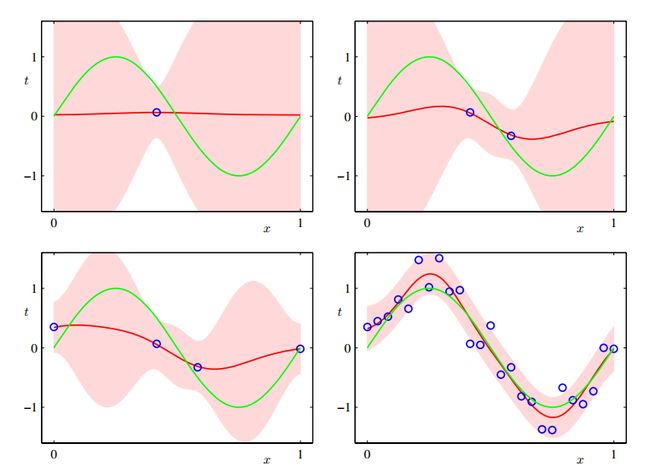
(1,1)图中点作为数据计算w的后验概率得mN,SN,绿色直线代表原始sin曲线,红色区域间距代表预测值的方差,红色直线代表预测值的均值。
3,等价核:(这块儿主要是第六章的类容)
注意,由于后验分布是⾼斯分布,它的众数恰好与它的均值相同。因此最⼤后验权向量的结果就是w_MAP = m_N。

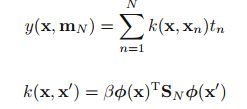
被称为平滑矩阵(smoother matrix)或者等价核(equivalent kernel)。像这样的回归函数,通过对训练集⾥⽬标值进⾏线性组合做预测,被称为线性平滑(linear smoother)
四、贝叶斯模型比较
(1)贝叶斯角度的模型选择,预测分布为平均各个模型
M:概率分布,由w决定
w:决定M的参数
(NOTE:w决定M,但p(w)!=p(M))
D:观察到的数据,由于x不考虑其概率,可以认为就是指y
model evidence:p(D∣Mi),表示不同模型下数据产生的概率 贝叶斯的“不同模型”来源于P(Mi),简单起见可以假设所有的模型具有相同的先验概率。
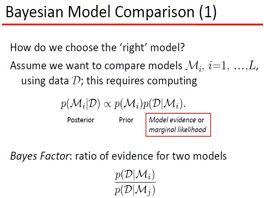
(2)模型平均的简单近似就是找一个最可能的模型,即是模型证据最大的

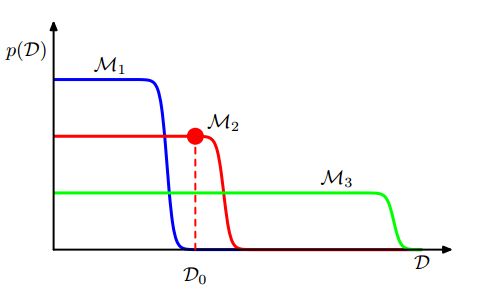
(3)模型证据的认识
忽略掉Mi,并假设p(w)和p(w|D)如下图:


右式第一项表示给定最佳参数w_wap的log likelihood,在wap情况下其值较大,第二项表示最佳参数下的惩罚度,其值比较小,当然还取决于先验概率。
我们选择的模型当然要使证据p(D|M)越大越好,如果M比较大,第一项必然变大(模型拟合的更好),而第二项会变的很小,这就是一个trade-off。
五、证据近似
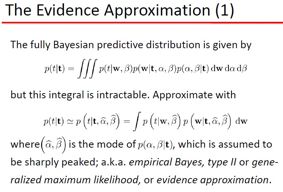
(1)证据近似的含义-一种计算最大化边缘似然函数的方法
在线性模型中,前面还有两个参数α,β(噪声方差参数和w的先验方差参数),在全bayes观点看来,其实应该视为随机变量,然后求预测值时应该对他们积分,但是这种方式是不可解析的。因此有一种近似的方法,就是通过最大化marginal likelihood function(对w积分去掉w)方法来求α,β的点估计。 全贝叶斯预测公式(预测分布):

假设p(α,β∣t) 仅在α^,β^处非常尖锐,那么上式可以简化为:

那么现在的问题是如何求α^,β^

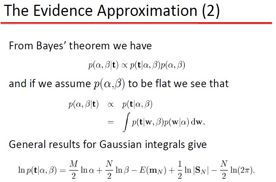
如果假设p(α,β)分布是平坦的,那么最大化后验概率就是最大化似然函数。这样参数的就能直接由训练数据给出。
(2)计算证据函数
(3)最大化证据函数
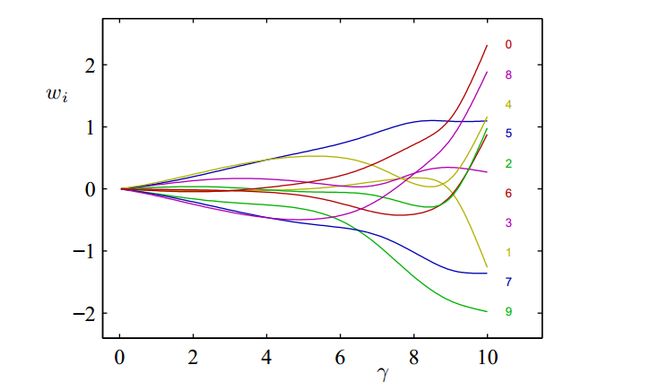
(4)参数的有效个数
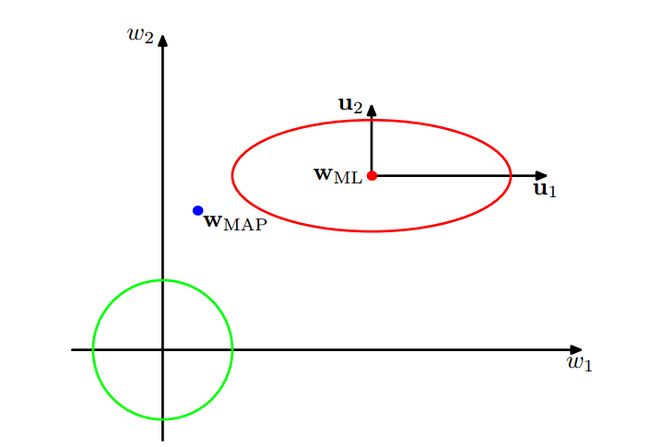
这里考察γ这个量的意义。上图其实描述的是p(w),p(t∣w)这两个式子的图(NOTE:书里现在讲的evidence是指p(t∣w))。这里假设p(t∣w)仅有两个参数,假设λ1,2.
我们知道p(t∣w)是高斯形式,其协方差矩阵就是A,因此λi是对应的特征值。假设λi对应wi(这里已经将参数空间旋转使之与特征向量平行,所以这里的w可能和前面的w不太一样,但是个数是不变的)。如果λi>>α,那么λ/λ+α=1代表的意义是证据函数在wi这个方向变化变化较大,称之为well determined参数;反之λ/λ+α=0,意指证据函数在这个方向上变化较小,不需要这个特征,如图在u1方向上变化就较大而在u2上较小。再考察γ的表达式,其实就是统计well determined参数的个数,这就是γ的意义。
(NOTE:这个图感觉和书上实际举例有一点冲突,感觉应该将椭圆旋旋或者wap点在右下比较合理)
(NOTE:高斯协方差矩阵的特征向量正交?)
对参数beta的理解:
对比下面两个式子:
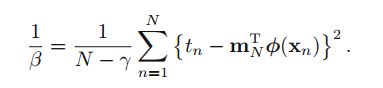
第一个式子是上节推导的结果的方差,第二个式子是最开始用ML直接推导的结果的方差。
两个相差一个γ。
首先解释一下自由度:是指当以样本的统计量来估计总体的参数时,样本中独立或能自由变化的数据的个数称为该统计量的自由度。
先看下面两个式子:
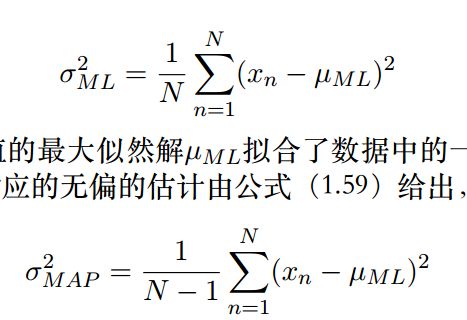
上面式子是方差有偏估计,下面是无偏的。注意到其实是因为样本均值的存在减少了1个自由数据的自由度导致的。(NOTE:书上说是因为拟合噪声导致的,不太好理解)
同理,由于在bayes估计中,发现有γ个有效参数,必然导致在估计方差时要降低γ个自由度。
(NOTE:假想数据t,x与w构成了N个方程,由于有效个数为γ,因此实际能用上的数据为γ个,所以自由变化的就是N-γ了)
现在仍然举第一章1.1节的例子,采用sin数据,M=10,假定β已经是优化值了
(NOTE:这里有两张图还要研究)
六、固定基函数的局限
前面的线性模型有很多优点,参数线性使得该模型有闭式解,而且bayes模型也是可解析的;能够通过基的选择解决大量非线性问题。但是存在以下两个缺点:
(1)基是固定的,而且在建模之前要选择好:比如多项式基选择很可能导致结果拟合的不好
(2)维数灾难:指随着数据维度升高,建模复杂度以指数形式增长。
比如:多项式基,数据维度为M时,若以3次建模,则需要O(M3),这里当然不是指数增长,但是仍然增长非常快,以至计算困难。
解决方案:降维
(1)数据x本身是高度相关的
(2)预测值y仅仅依赖于部分x