算法思想:如果一个像素与它邻域的像素差别较大(过亮或过暗) , 那它更可能是角点。
算法步骤:
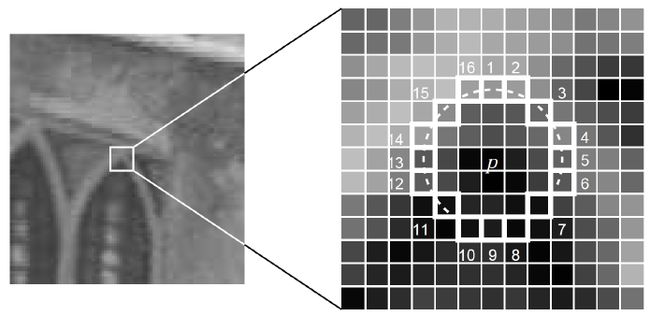
1.上图所示,一个以像素p为中心,半径为3的圆上,有16个像素点(p1、p2、...、p16)。
2.定义一个阈值。计算p1、p9与中心p的像素差,若它们绝对值都小于阈值,则p点不可能是特征点,直接pass掉;否则,当做候选点,有待进一步考察;
3.若p是候选点,则计算p1、p9、p5、p13与中心p的像素差,若它们的绝对值有至少3个超过阈值,则当做候选点,再进行下一步考察;否则,直接pass掉;
4.若p是候选点,则计算p1到p16这16个点与中心p的像素差,若它们有至少9个超过阈值,则是特征点;否则,直接pass掉。
5.对图像进行非极大值抑制:计算特征点出的FAST得分值(即score值,也即s值),判断以特征点p为中心的一个邻域(如3x3或5x5)内,计算若有多个特征点,则判断每个特征点的s值(16个点与中心差值的绝对值总和),若p是邻域所有特征点中响应值最大的,则保留;否则,抑制。若邻域内只有一个特征点(角点),则保留。
代码如下:
clear all; close all; clc; img=imread('lena.jpg'); imshow(img) [m n]=size(img); score=zeros(m,n); t=60; %阈值 for i=4:m-3 for j=4:n-3 p=img(i,j); %步骤1,得到以p为中心的16个邻域点 pn=[img(i-3,j) img(i-3,j+1) img(i-2,j+2) img(i-1,j+3) img(i,j+3) img(i+1,j+3) img(i+2,j+2) img(i+3,j+1) ... img(i+3,j) img(i+3,j-1) img(i+2,j-2) img(i+1,j-3) img(i,j-3) img(i-1,j-3) img(i-2,j-2) img(i-3,j-1)]; %步骤2 if abs(pn(1)-p)9)-p)<t continue; end %步骤3 p1_5_9_13=[abs(pn(1)-p)>t abs(pn(5)-p)>t abs(pn(9)-p)>t abs(pn(13)-p)>t]; if sum(p1_5_9_13)>=3 ind=find(abs(pn-p)>t); %步骤4 if length(ind)>=9 score(i,j) = sum(abs(pn-p)); end end end end %步骤5,非极大抑制,并且画出特征点 for i=4:m-3 for j=4:n-3 if score(i,j)~=0 if max(max(score(i-2:i+2,j-2:j+2)))==score(i,j) [img(i-3,j), img(i-3,j+1), img(i-2,j+2), img(i-1,j+3), img(i,j+3), img(i+1,j+3), img(i+2,j+2), img(i+3,j+1), ... img(i+3,j), img(i+3,j-1), img(i+2,j-2), img(i+1,j-3), img(i,j-3), img(i-1,j-3), img(i-2,j-2), img(i-3,j-1)]= ... deal(255,255,255,255,255,255,255,255,255,255,255,255,255,255,255,255); end end end end figure; imshow(img);
结果如下:
原图:

检测结果:

参考:https://www.cnblogs.com/wyuzl/p/7834159.html