引导滤波(GuidedFilter)原理及C++实现
写在前面
引导滤波是何恺明读博士的时候提出来的一种去噪保边算法,很有名。作者其主页上给出了该算法的Matlab实现和原文。而且他提出的基于暗通道去雾算法技惊四座,获CVPR2009最佳论文(膜拜),近几年在CV领域的成果也相当丰硕,关于他的研究动态,可以访问http://kaiminghe.com/。
优点:
1、应用面很广、很广;
2、能够克服双边滤波的梯度翻转现象,在滤波后图像的细节上更优;
3、最重要的优点,快,效率高,时间复杂度为O(N),N是像素个数,也就是说与掩膜窗口尺寸无关了,我们知道传统双边滤波效率是很低的。还有更快的Fast Guide Filter:https://arxiv.org/abs/1505.00996
应用:图像增强、图像融合、图像去雾、图像去噪、羽化、美颜、三维重建等等。
如果你仅仅只是需要运用这个算法,现在opencv 3.0和MATLAB 14都已经添加了guided filter的API,可以直接调用。
opencv中的API如下void cv::ximgproc::guidedFilter(),具体的可以参考opencv的帮助文档关于导向滤波的介绍guidedFilter。
但是需要提醒的是,opencv中guidedFilter()函数包含在ximgproc模块下,但是从官方下载的标准的opencv.exe程序中并不包含该模块,需要分别下载opencv的source文件和contrib模块的source文件,然后自己编译,具体可以参考opencv3.1.0+contrib模块编译总结。
原理
说实话,引导滤波的理论还是蛮深的,不容易讲清楚,我这小菜鸡看了原文,还看了很多博客,也是一知半解。好在作者在原文中给出了伪代码,程序实现起来比较简单,我基于OpenCV写了一个,经过测试,和作者的Matlab实现效果是一样的。
为了不误导读者,还是等我自己完全搞明白了,再详细写原理。这里就推荐几个原理写的好的博客吧:
1、https://www.cnblogs.com/riddick/p/8367591.html
2、白马负金羁-导向滤波(Guided Filter)的解析与实现
3、https://www.cnblogs.com/yzl050819/p/7515250.html
伪代码:

基于OpenCV的C++实现
实现分为两种:灰度图作为引导图、彩色图作为引导图,值得说明的是:两种实现的滤波图像都只能对单通道图像进行处理。若需要处理彩色图像,在main中只需将图像split,然后对各个通道分别滤波,最后merge就可以了。作者还在原文中指出,用彩色图作为引导图能更好地保持边缘细节,我后面的效果也确实印证了这一点。
灰度图作为引导图(main中可以处理彩色图像)
#include
#include
#include
#include
//////////////////////////////////////////////
// GUIDEDFILTER O(1) time implementation of guided filter.
// -guidance image : I(should be a gray - scale / single channel image)
// -filtering input image : p(should be a gray - scale / single channel image)
// -local window radius : r
// -regularization parameter : eps
/////////////////////////////////////////////
cv::Mat GuidedFilter(cv::Mat& I, cv::Mat& p, int r, double eps){
int wsize = 2 * r + 1;
//数据类型转换
I.convertTo(I, CV_64F, 1.0 / 255.0);
p.convertTo(p, CV_64F, 1.0 / 255.0);
//meanI=fmean(I)
cv::Mat mean_I;
cv::boxFilter(I, mean_I, -1, cv::Size(wsize, wsize), cv::Point(-1, -1), true, cv::BORDER_REFLECT);//盒子滤波
//meanP=fmean(P)
cv::Mat mean_p;
cv::boxFilter(p, mean_p, -1, cv::Size(wsize, wsize), cv::Point(-1, -1), true, cv::BORDER_REFLECT);//盒子滤波
//corrI=fmean(I.*I)
cv::Mat mean_II;
mean_II = I.mul(I);
cv::boxFilter(mean_II, mean_II, -1, cv::Size(wsize, wsize), cv::Point(-1, -1), true, cv::BORDER_REFLECT);//盒子滤波
//corrIp=fmean(I.*p)
cv::Mat mean_Ip;
mean_Ip = I.mul(p);
cv::boxFilter(mean_Ip, mean_Ip, -1, cv::Size(wsize, wsize), cv::Point(-1, -1), true, cv::BORDER_REFLECT);//盒子滤波
//varI=corrI-meanI.*meanI
cv::Mat var_I, mean_mul_I;
mean_mul_I=mean_I.mul(mean_I);
cv::subtract(mean_II, mean_mul_I, var_I);
//covIp=corrIp-meanI.*meanp
cv::Mat cov_Ip;
cv::subtract(mean_Ip, mean_I.mul(mean_p), cov_Ip);
//a=conIp./(varI+eps)
//b=meanp-a.*meanI
cv::Mat a, b;
cv::divide(cov_Ip, (var_I+eps),a);
cv::subtract(mean_p, a.mul(mean_I), b);
//meana=fmean(a)
//meanb=fmean(b)
cv::Mat mean_a, mean_b;
cv::boxFilter(a, mean_a, -1, cv::Size(wsize, wsize), cv::Point(-1, -1), true, cv::BORDER_REFLECT);//盒子滤波
cv::boxFilter(b, mean_b, -1, cv::Size(wsize, wsize), cv::Point(-1, -1), true, cv::BORDER_REFLECT);//盒子滤波
//q=meana.*I+meanb
cv::Mat q;
q = mean_a.mul(I) + mean_b;
//数据类型转换
I.convertTo(I, CV_8U, 255);
p.convertTo(p, CV_8U, 255);
q.convertTo(q, CV_8U, 255);
return q;
}
int main(){
cv::Mat src = cv::imread("I:\\Learning-and-Practice\\2019Change\\Image process algorithm\\Img\\woman.jpg");
if (src.empty()){
return -1;
}
//if (src.channels() > 1)
// cv::cvtColor(src, src, CV_RGB2GRAY);
//自编GuidedFilter测试
double t2 = (double)cv::getTickCount(); //测时间
cv::Mat dst1, src_input, I;
src.copyTo(src_input);
if (src.channels() > 1)
cv::cvtColor(src, I, CV_RGB2GRAY); //若引导图为彩色图,则转为灰度图
std::vector p,q;
if (src.channels() > 1){ //输入为彩色图
cv::split(src_input, p);
for (int i = 0; i < src.channels(); ++i){
dst1 = GuidedFilter(I, p[i], 9, 0.1*0.1);
q.push_back(dst1);
}
cv::merge(q, dst1);
}
else{ //输入为灰度图
src.copyTo(I);
dst1 = GuidedFilter(I, src_input, 9, 0.1*0.1);
}
t2 = (double)cv::getTickCount() - t2;
double time2 = (t2 *1000.) / ((double)cv::getTickFrequency());
std::cout << "MyGuidedFilter_process=" << time2 << " ms. " << std::endl << std::endl;
cv::namedWindow("GuidedImg", CV_WINDOW_NORMAL);
cv::imshow("GuidedImg", I);
cv::namedWindow("src", CV_WINDOW_NORMAL);
cv::imshow("src", src);
cv::namedWindow("GuidedFilter_box", CV_WINDOW_NORMAL);
cv::imshow("GuidedFilter_box", dst1);
cv::waitKey(0);
}
效果(核半径=9,eps=0.1*0.1)

引导图 输入图 结果图

引导图 输入图 结果图
彩色图作为引导图(只能处理单通道图像)
#include
#include
#include
#include
///////////////////////////////////////////////////////////////////
// GUIDEDFILTER_COLOR O(1) time implementation of guided filter using a color image as the guidance.
//
// -guidance image : I(should be a color(RGB) image)
// -filtering input image : p(should be a gray - scale / single channel image)
// -local window radius : r
// -regularization parameter : eps
///////////////////////////////////////////////////////////////////
cv::Mat GuidedFilter_Color(cv::Mat& I, cv::Mat& p, int r, double eps ){
int wsize = 2 * r + 1;
//数据类型转换
I.convertTo(I, CV_64F, 1.0 / 255.0);
p.convertTo(p, CV_64F, 1.0 / 255.0);
//引导图通道分离
if (I.channels() == 1){
std::cout<<"I should be a color(RGB) image "< rgb;
cv::split(I, rgb);
//meanI=fmean(I)
cv::Mat mean_I_r, mean_I_g, mean_I_b;
cv::boxFilter(rgb[0], mean_I_b, -1, cv::Size(wsize, wsize), cv::Point(-1, -1), true, cv::BORDER_REFLECT);//盒子滤波
cv::boxFilter(rgb[1], mean_I_g, -1, cv::Size(wsize, wsize), cv::Point(-1, -1), true, cv::BORDER_REFLECT);//盒子滤波
cv::boxFilter(rgb[2], mean_I_r, -1, cv::Size(wsize, wsize), cv::Point(-1, -1), true, cv::BORDER_REFLECT);//盒子滤波
//meanP=fmean(P)
cv::Mat mean_p;
cv::boxFilter(p, mean_p, -1, cv::Size(wsize, wsize), cv::Point(-1, -1), true, cv::BORDER_REFLECT);//盒子滤波
//corrI=fmean(I.*I)
cv::Mat mean_II_rr, mean_II_rg, mean_II_rb, mean_II_gb, mean_II_gg, mean_II_bb;
cv::boxFilter(rgb[2].mul(rgb[2]), mean_II_rr, -1, cv::Size(wsize, wsize), cv::Point(-1, -1), true, cv::BORDER_REFLECT);//盒子滤波
cv::boxFilter(rgb[2].mul(rgb[1]), mean_II_rg, -1, cv::Size(wsize, wsize), cv::Point(-1, -1), true, cv::BORDER_REFLECT);//盒子滤波
cv::boxFilter(rgb[2].mul(rgb[0]), mean_II_rb, -1, cv::Size(wsize, wsize), cv::Point(-1, -1), true, cv::BORDER_REFLECT);//盒子滤波
cv::boxFilter(rgb[1].mul(rgb[0]), mean_II_gb, -1, cv::Size(wsize, wsize), cv::Point(-1, -1), true, cv::BORDER_REFLECT);//盒子滤波
cv::boxFilter(rgb[1].mul(rgb[1]), mean_II_gg, -1, cv::Size(wsize, wsize), cv::Point(-1, -1), true, cv::BORDER_REFLECT);//盒子滤波
cv::boxFilter(rgb[0].mul(rgb[0]), mean_II_bb, -1, cv::Size(wsize, wsize), cv::Point(-1, -1), true, cv::BORDER_REFLECT);//盒子滤波
//corrIp=fmean(I.*p)
cv::Mat mean_Ip_r, mean_Ip_g, mean_Ip_b;
mean_Ip_b = rgb[0].mul(p);
mean_Ip_g = rgb[1].mul(p);
mean_Ip_r = rgb[2].mul(p);
cv::boxFilter(mean_Ip_b, mean_Ip_b, -1, cv::Size(wsize, wsize), cv::Point(-1, -1), true, cv::BORDER_REFLECT);//盒子滤波
cv::boxFilter(mean_Ip_g, mean_Ip_g, -1, cv::Size(wsize, wsize), cv::Point(-1, -1), true, cv::BORDER_REFLECT);//盒子滤波
cv::boxFilter(mean_Ip_r, mean_Ip_r, -1, cv::Size(wsize, wsize), cv::Point(-1, -1), true, cv::BORDER_REFLECT);//盒子滤波
//covIp=corrIp-meanI.*meanp
cv::Mat cov_Ip_r, cov_Ip_g, cov_Ip_b;
cv::subtract(mean_Ip_r, mean_I_r.mul(mean_p), cov_Ip_r);
cv::subtract(mean_Ip_g, mean_I_g.mul(mean_p), cov_Ip_g);
cv::subtract(mean_Ip_b, mean_I_b.mul(mean_p), cov_Ip_b);
//varI=corrI-meanI.*meanI
//variance of I in each local patch : the matrix Sigma in Eqn(14).
//Note the variance in each local patch is a 3x3 symmetric matrix :
// rr, rg, rb
// Sigma = rg, gg, gb
// rb, gb, bb
cv::Mat var_I_rr, var_I_rg, var_I_rb, var_I_gb, var_I_gg, var_I_bb;
cv::subtract(mean_II_rr, mean_I_r.mul(mean_I_r), var_I_rr);
cv::subtract(mean_II_rg, mean_I_r.mul(mean_I_g), var_I_rg);
cv::subtract(mean_II_rb, mean_I_r.mul(mean_I_b), var_I_rb);
cv::subtract(mean_II_gb, mean_I_g.mul(mean_I_b), var_I_gb);
cv::subtract(mean_II_gg, mean_I_g.mul(mean_I_g), var_I_gg);
cv::subtract(mean_II_bb, mean_I_b.mul(mean_I_b), var_I_bb);
//a=conIp./(varI+eps)
int cols = p.cols;
int rows = p.rows;
cv::Mat Mat_a = cv::Mat::zeros(rows, cols,CV_64FC3);
std::vector a;
cv::split(Mat_a, a);
double rr, rg, rb, gg, gb, bb;
for (int i = 0; i < rows; ++i){
for (int j = 0; j < cols; ++j){
rr = var_I_rr.at(i, j); rg = var_I_rg.at(i, j); rb = var_I_rb.at(i, j);
gg = var_I_gg.at(i, j); gb = var_I_gb.at(i, j);
bb = var_I_bb.at(i, j);
cv::Mat sigma = (cv::Mat_(3, 3) << rr, rg, rb,
rg, gg, gb,
rb, gb, bb);
cv::Mat cov_Ip = (cv::Mat_(1, 3) << cov_Ip_r.at(i, j), cov_Ip_g.at(i, j), cov_Ip_b.at(i, j));
cv::Mat eye = cv::Mat::eye(3, 3, CV_64FC1);
sigma = sigma + eps*eye;
cv::Mat sigma_inv = sigma.inv();//求逆矩阵
cv::Mat tmp = cov_Ip*sigma_inv;
a[2].at(i, j) = tmp.at(0, 0);//r
a[1].at(i, j) = tmp.at(0, 1);//g
a[0].at(i, j) = tmp.at(0, 2);//b
}
}
//b=meanp-a.*meanI
cv::Mat b = mean_p - a[0].mul(mean_I_b) - a[1].mul(mean_I_g) - a[2].mul(mean_I_r);
//meana=fmean(a)
//meanb=fmean(b)
cv::Mat mean_a_r, mean_a_g, mean_a_b, mean_b;
cv::boxFilter(a[0], mean_a_b, -1, cv::Size(wsize, wsize), cv::Point(-1, -1), true, cv::BORDER_REFLECT);//盒子滤波
cv::boxFilter(a[1], mean_a_g, -1, cv::Size(wsize, wsize), cv::Point(-1, -1), true, cv::BORDER_REFLECT);//盒子滤波
cv::boxFilter(a[2], mean_a_r, -1, cv::Size(wsize, wsize), cv::Point(-1, -1), true, cv::BORDER_REFLECT);//盒子滤波
cv::boxFilter(b, mean_b, -1, cv::Size(wsize, wsize), cv::Point(-1, -1), true, cv::BORDER_REFLECT);//盒子滤波
//q=meana.*I+meanb
cv::Mat q = mean_a_r.mul(rgb[2]) + mean_a_g.mul(rgb[1]) + mean_a_b.mul(rgb[0]) + mean_b;
//数据类型转换
I.convertTo(I, CV_8UC3, 255);
p.convertTo(p, CV_8U, 255);
q.convertTo(q, CV_8U, 255);
return q;
}
int main(){
cv::Mat I = cv::imread("I:\\Learning-and-Practice\\2019Change\\Image process algorithm\\Img\\woman1.jpeg");
cv::Mat P = cv::imread("I:\\Learning-and-Practice\\2019Change\\Image process algorithm\\Img\\woman1.jpeg");
if (I.empty() || P.empty()){
return -1;
}
if (P.channels() > 1)
cv::cvtColor(P, P, CV_RGB2GRAY);
//自编GuidedFilter测试
double t2 = (double)cv::getTickCount(); //测时间
cv::Mat q;
q = GuidedFilter_Color(I, P, 9, 0.2*0.2);
t2 = (double)cv::getTickCount() - t2;
double time2 = (t2 *1000.) / ((double)cv::getTickFrequency());
std::cout << "MyGuidedFilter_process=" << time2 << " ms. " << std::endl << std::endl;
cv::namedWindow("GuidedImg");
cv::imshow("GuidedImg", I);
cv::namedWindow("src");
cv::imshow("src", P);
cv::namedWindow("GuidedFilter", CV_WINDOW_NORMAL);
cv::imshow("GuidedFilter", q);
cv::waitKey(0);
}
效果(核半径=9,eps=0.1*0.1)
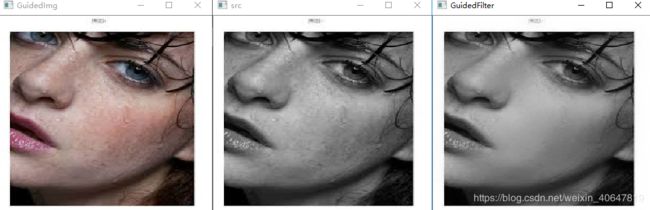
引导图 输入图 结果图
这里的结果图比用灰度图作为引导,边缘保持更好,可以仔细对比观察面部和鼻子。