吴恩达.深度学习系列-C4卷积神经网络-W1卷积神经网络基础
-
- 学习目标
- 1.计算机视觉
- 2.边缘检测示例
- 3.其他边缘检测
- 4.Padding
- 5.卷积步长 strided convolution
- 6.在三维图像(RGB)上进行卷积
- 7.单层式卷积网络one Layer of a Convolution Network
- 8.简单型卷积网络示例
- 9.池化层 Pooling Layers
- 10.卷积神经网络示例(CNN Example)
- 11.为何要用卷积?
- 12.practic
- 13.番外,卷积核的数学意义
- 13.1.拉普拉斯算子(卷积核)
- 13.2从Robert,Prewitt算子到sobel算子
- 14.编程题
- 卷积过程相关代码
-
- Z1 = tf.nn.conv2d(X,W1, strides = [1,1,1,1], padding = ‘SAME’)
- A1 = tf.nn.relu(Z1)
- P1 = tf.nn.max_pool(A1, ksize = [1,8,8,1], strides = [1,8,8,1], padding = ‘SAME’)
- P2 = tf.contrib.layers.flatten(P2)
- Z3 = tf.contrib.layers.fully_connected(P2, 6,activation_fn=None)
- cost = tf.reduce_mean(tf.nn.softmax_cross_entropy_with_logits(logits = Z3, labels = Y))
- optimizer = tf.train.AdamOptimizer(learning_rate=learning_rate).minimize(cost)
-
- 卷积过程相关代码
学习目标
- Understand the convolution operation
- Understand the pooling operation
- Remember the vocabulary used in convolutional neural network (padding, stride, filter, …)
- Build a convolutional neural network for image multi-class classification
1.计算机视觉
应用方式:
- Image Classification
- Object detection
- Neural Style Transfer
在大图片上进行深度学习。普通学习图片可以达到1000*1000*3(通道数)的级别。将是一个有3,000,000(3 million)特征数的输入。
2.边缘检测示例

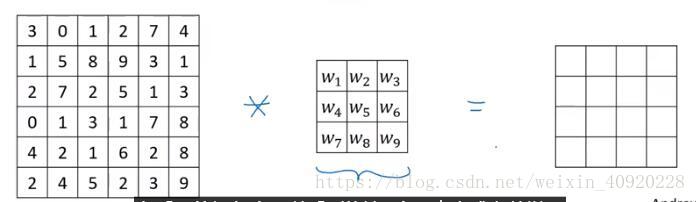
垂直边缘检测,在课堂的实例中其实是使用了一个Prewitt的filter(filter过滤器,【图像处理】滤波器模板,神经网络的卷积核kernel指的都是一个意思)。参考本笔记12.2。
数学里,星号是卷积的标准符号,×是乘号。但是一般编程语言里星号 表示乘法。卷积操作是矩阵求内积。
3.其他边缘检测

如上图上下所示。
颜色由深变浅,产生正边缘。颜色由浅入深,产生负边缘。
更据filter的不同数值填入,检测器会具备一些独特的边缘检测,除了水平、垂直检测,还有可能45度检测,75度检测,72度检测等等等等。
卷积神经网络的独特之处:将filter中的元素当作参数去学习,并通过反向传播让模型自己去学习该设置什么值。而这将生成更加善于捕捉你的数据的统计学特征的过滤器。并且很有可能超过CV专业人员精心设计的filter数值。简而言之,训练CNN在相当意义上是在训练每一个卷积层的滤波器。让这些滤波器组对特定的模式有高的激活,以达到CNN网络的分类/检测等目的。
在单层卷积后,通常能提取出横向、纵向、斜向的边缘这样的简单特征。经过多次卷积后,filter能通过学习提取出复杂的组合特征。例如眼睛、鼻子等等由多种线条组合而成的图形,这些高维特征是一系列低维特征的组合。在一些论文中有将这些卷积后的图片显示出来供研究人员观察,观察卷积网络学习到的是些什么图像。“反卷积”是不是这种应用的定义?
4.Padding
不padding的情况下:(n×n)的图片,用(f×f)的filter卷积,产生的输出大小(n-f+1)×(n-f+1)
不进行padding的缺点:
- 输入图片的边缘像素,因为不处于对称中心点,被卷积遍历运算引用的次数比图像中心区域的像素点少的多。即我们会丢失图像靠近边界的信息。
- 每一次卷积图片都会缩小,多次卷积图片将变得非常的小。
所以,有必要进行padding(补白)。比如输入图片是(6×6)padding成(8×8)的图片后,再进行kernel=(3×3)的卷积,输出将还是一个(6×6)的图像。
| Padding/Not | Cool | |
|---|---|---|
| “Valid” convolution | no Padding | 会忽略图像边缘的信息 |
| “Same” convolution | Pad so that output size is the same as the input size. | 单侧padding的像素个数p=(f-1)/2时 输出图片与输入图片同样大小 |
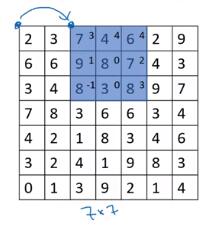
5.卷积步长 strided convolution
就是filter每次移动的步长。通常情况下,步长=1。如果设定步长=2,前后两次filter的起始位置相距2个像素(水平方向移动是相距2个像素,换行时也是下降两像素)。下图示例就是strided=2的情形。
filter大小是(f×f),加上Strided(s)、padding(p是单侧补上的像素宽度)后,输入图片(n×n)与输出图片大小间的关系是:
互相关(cross-correlation)与卷积
在数学教材书籍上,卷积操作需要对卷积核先做水平与垂直翻转,再求卷积。这会产生一种性质:(A卷积B)* 卷积C = A卷积 *(B卷积C) ,这一性质在数学上叫结合率(associativity),这一性质在信号处理领域很有用 但对深度神经网络而言,它并不重要 。从数学定义上,我们现在进行的“无翻转卷积核”操作最好称之为交叉相关。
但在机器学习的约定中, 我们通常忽略掉翻转的操作,并将这称之为卷积。
6.在三维图像(RGB)上进行卷积
在二维(W×H)图像上的卷积示意图:

Convolutions over Volume
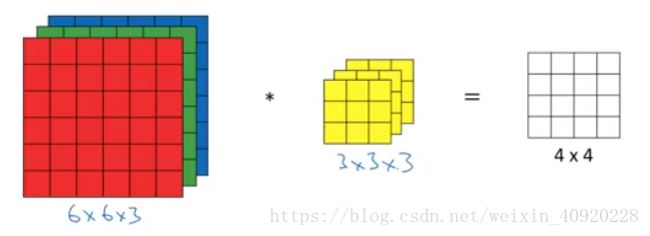
对于一个多通道图片,以RGB图片举例是3通道,要建立一个对等通道数的filter,即RGB图片要3个filter。这3个filter分别与原始图片的三个通道进行卷积操作。合计求和成一个值填入输出图像上。
所以虽然输入图像有3层,但输出图像是单层的。
如何在应用中应用多个过滤器
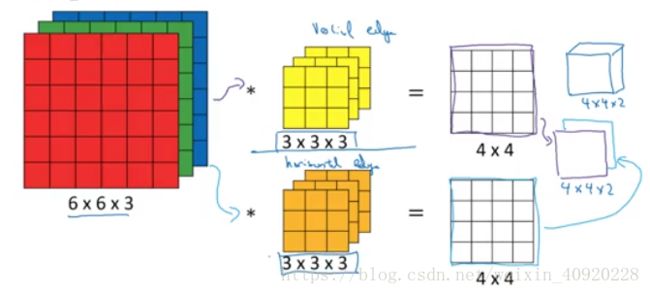
应用两个过滤器,那么输出就是两层。这两层也是下一层的输入。实际上你可以在同一层应用很多个filter来捕捉原始图片上各种各样的特征。
summary:
原始图片(n×n×nc)∗filter(f×f×nc)→(n−f+1)×(n−f+1)×n′c 原 始 图 片 ( n × n × n c ) ∗ f i l t e r ( f × f × n c ) → ( n − f + 1 ) × ( n − f + 1 ) × n c ′
n′c n c ′ ,是下一层的 nc n c ,等于应用过滤器的数量
7.单层式卷积网络one Layer of a Convolution Network
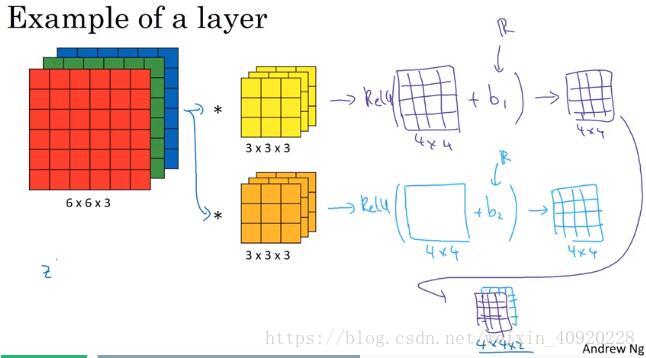
如上图所示,一层完整卷积层,包括
- 使用n个filter进行卷积,
- 每个filter输出的卷积结果加上各自的偏置量,得出Z(一个卷积核共享一个b)
- 对这个Z进行激活操作,比如relu。
- 最终的输出结果有n层(depth=n)
卷积网络的参数数量计算
If you have 10 filters that are 3×3×3 in one layer of a neural network,how many parameters does that layer have?
NumberParameters=(单个kernel的参数量+1个偏置量)×filter总数=[(3×3×3)+1]×10=280 N u m b e r P a r a m e t e r s = ( 单 个 k e r n e l 的 参 数 量 + 1 个 偏 置 量 ) × f i l t e r 总 数 = [ ( 3 × 3 × 3 ) + 1 ] × 10 = 280
优点:无论输入层多大(输入的图片多大),参数量恒定。相比普通神经网络输入有多少个特征就至少有 n0∗n1 n 0 ∗ n 1 个参数,尤其针对比如2000*2000这样大型的图片输入,这的确会大大减少了参数数量,这便是卷积层的“权值共享”特性,能使得卷积神经网络更不容易过拟合。
标注说明:
f[l] f [ l ] ,表示第l层filter的size
p[l] p [ l ] ,表示第l层padding的单侧像素宽度
s[l] s [ l ] ,表示第l层的stride
n[l]c=f[l] n c [ l ] = f [ l ] ,输出图像的深度
输入图像的H!=W时:
8.简单型卷积网络示例
1)登记好输入层 a[0] a [ 0 ] 的shape,记录将要进行的卷积的filter size,stride,padding num,filter num。
2)计算输出的shape, a[1] a [ 1 ]
3)登记下一个卷积的filter size,stride,padding num,filter num
4)计算输出的shape, a[2] a [ 2 ]
5) ……
6) 比如最后的卷积输出shape是,(7×7×40)有40个特征层,将(7×7×40)扁平化为一个1960向量,连接softmax进行分类判断。
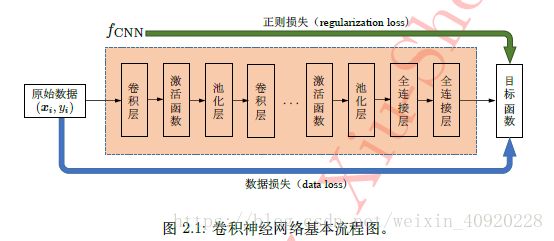
一个典型的卷积神经网络的层次结构如下图:
9.池化层 Pooling Layers
相对于卷积层对filter进行求内积,池化层是对filter size内的输入数据,求最大值(max pooling)或求平均值(average pooling)。无论是最大值还是平均值,相当于对输入数据指定区域进行一次“关键特征的提取”,经过pooling后,图片的大小会缩小,所以也被称为降采样(down-sampling)操作。另一方面,汇合也看成是一个用p范数(p-norm)作为非线性映射的“卷积”操作,特别的,当p 趋近正无穷时就是最常见的最大值汇合。
汇合层具备如下三种功效:
- 特征不变性(feature invariant)。汇合操作使模型更关注是否存在某些特征而不是特征具体的位置。可看作是一种很强的先验,使特征学习包含某种程度自由度,能容忍一些特征微小的位移。
- 特征降维。由于汇合操作的降采样作用,汇合结果中的一个元素对应于原输入数据的一个子区域(sub-region),因此汇合相当于在空间范围内做了维度约减(spatially dimension reduction),从而使模型可以抽取更广范围的特征。同时减小了下一层输入大小,进而减小计算量和参数个数。
在一定程度防止过拟合(overfitting),更方便优化。【注:减少参数,被认为是能减少过拟合】
卷积与池化操作的对比如下:
| - | 卷积操作 | 池化操作 |
|---|---|---|
| 计算 | 对filter求内积 | 对filter取max/average |
| 参数 | filter(卷积核)的参数学习 | 无 |
| 需指定filter size | 有 | 有 |
| 需指定stride | 有 | 有 |
| padding | 有 | 无 |
| 是否需学习参数 | 是 | 否(只需指定超参数,没有要学习的参数) |
| 输出的层数(depth,channel) | 等于filter的个数 | 等于输入的层数,不改变输入的depth |
10.卷积神经网络示例(CNN Example)

池化层是否被计算为1层?课程认为,没有需要学习的参数的层不被单独计算为一层,所以,本课程将遵循,将卷积+池化共同计为一层的方式。
各层的特征个数,与参数数量:
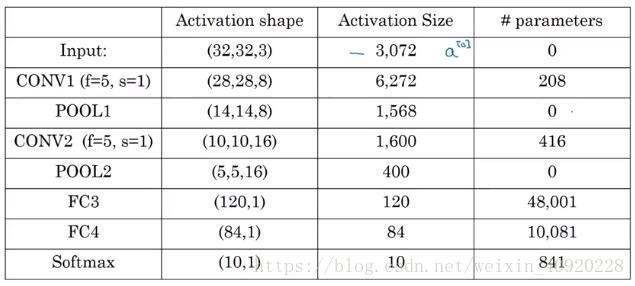
可以看到参数的大部分在全连接层上。
网络中每一层的特征个数,应该要逐渐下降,减少的太快通常认为不利于网络的性能
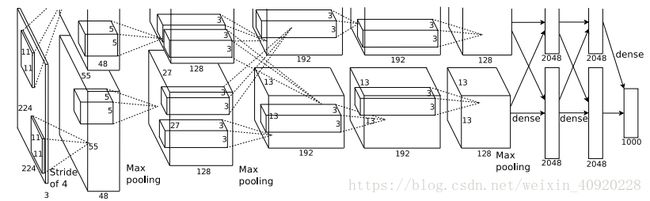
下图是AlexNet网络结构。AlexNet在当时被认为是划时代的网络模型。但是神经网络发展太快,现在比它先进的多的网络模型不断涌现。但是AlexNet当时的设计思路,和许多特点还是能给予借鉴。
11.为何要用卷积?
加入卷积层后的优点:
1. 参数共享(或称权值共享,weight sharing,Parameter sharing): 参考第7.小节中关于优点“权值共享”的描述。
2. 稀疏式连接(Sparsity of connections):卷积输出的单个值,只是跟少数输入数据相关。而不像全连接神经网络,每个输出值都与所有输入单元相关。这就是稀疏式连接
3. 平移不变性(translation invariant):卷积帮助网络在输入图片上下左右移动主要识别物体后,如“猫”,能够获得相同的识别结果。
12.practic
What do you think applying this filter to a grayscale image will do?
答:这个卷积核是进行垂直边缘检测
You have an input volume that is 32x32x16, and apply max pooling with a stride of 2 and a filter size of 2. What is the output volume?
答:使用pooling层输出大小计算公式 ⌊n−fs+1⌋ ⌊ n − f s + 1 ⌋
Because pooling layers do not have parameters, they do not affect the backpropagation (derivatives) calculation.
答:不对。方向传播中,pooling层要按max(只传递给最大值),或 average(传递给filter覆盖的所有值)方式规则将梯度反向传给前一层。因此不能说它不影响计算。
13.番外,卷积核的数学意义
参考:《解析卷积神经网络》-魏秀参
深度学习的一个重要思想即“端到端”的学习方式(end-to-end manner),属
表示学习(representation learning )的一种。
在深度学习时代之前,样本表示基本都使用人工特征(hand-crafted),但“巧妇难为无米之炊”,实际上人工特征的优劣往往很大程度决定了最终的任务精度。这样便催生了一种特殊的机器学习分支——特征工程(feature engineering)。[“A Performance Evaluation of Local Descriptors”系统性的解释不同局部特征描述子的作用,2013年深度学习巨头Yoshua Bengio就认为,深度学习将替代特征工程]而在深度学习普及之后,人工特征已逐渐被表示学习根据任务自动需求“学到”的特征表示所取代。
13.1.拉普拉斯算子(卷积核)
参考:《数字图像处理》-冈萨雷斯
卷积核在数字图像处理领域叫“算子”,是对图像不同轴向求微分近似值,从而达到提取图像边缘信息的一种方法。
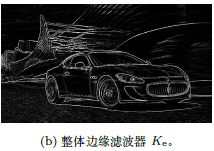
原图与不同算子卷积后的效果图。
| 整体边缘滤波器 拉普拉斯算子 |
横向边缘滤波器 sobel横向算子 |
纵向边缘滤波器 sobel纵向算子 |
|---|---|---|
| ⎡⎣⎢0−40−416−40−40⎤⎦⎥ [ 0 − 4 0 − 4 16 − 4 0 − 4 0 ] | ⎡⎣⎢10−120−210−1⎤⎦⎥ [ 1 2 1 0 0 0 − 1 − 2 − 1 ] | ⎡⎣⎢121000−1−2−1⎤⎦⎥ [ 1 0 − 1 2 0 − 2 1 0 − 1 ] |
 |
 |
 |
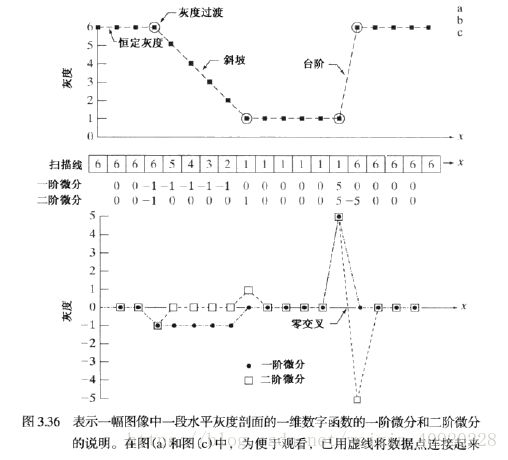
对于一维函数f(x),其一阶微分的基本定义是差值:
二阶微分是如下的差分:
而对于二维图像函数 f(x,y) f ( x , y ) ,就是沿着两个空间轴分别处理偏微分。
对于灰度过度的斜坡,其一阶微分不是零,二阶微分是零。这样导致图像的一阶微分会产生较粗的边缘,因为沿着斜坡的微分非零。二阶微分可以通过卷积来获得,这样在操作上也比一阶微分计算简单。所以在寻找图像边缘上使用二阶微分。
而在图片边缘提取的操作,基本上是由定义一个二阶微分的离散公式,然后构建一个基于该公式的滤波器模板组成。拉普拉斯算子是个各向同性微分算子。一个二维图象函数 f(x,y) f ( x , y ) 的拉普拉斯算子定义为:
组合以上可以得到离散拉普拉斯算子:
楼上公式是x,y两个方向求二阶微分,还可以增加两个对角线上求二阶微分。增加两对角线后,总共应该减去 −8f(x,y) − 8 f ( x , y )

图a:标准负中心,两轴拉普拉斯滤波器模板
图b:标准负中心,两轴加对角拉普拉斯滤波器模板
图c:正中心,两轴拉普拉斯滤波器模板
图d:正中心,两轴加对角拉普拉斯滤波器模板
13.2从Robert,Prewitt算子到sobel算子
Sobel算子主要用作边缘检测,是检测图像灰度变化一阶导数的应用。在图像f的(x,y)位置处寻找边缘的强度和方向,选择的工具是梯度,并用向量来定义梯度 ▽f ▽ f
向量 ▽f ▽ f 的大小(长度)计算公式为:
这也是检测结果输出图上,该点的灰度值。另外还能得到梯度向量的法向量(正交)。
要计算每个像素点位置的偏导数: gx=∂f(x,y)∂x=f(x+1,y)−f(x,y) g x = ∂ f ( x , y ) ∂ x = f ( x + 1 , y ) − f ( x , y ) ,
gy=∂f(x,y)∂y=f(x,y+1)−f(x,y) g y = ∂ f ( x , y ) ∂ y = f ( x , y + 1 ) − f ( x , y ) 。要计算这两个公式,可以使用一维模板对 f(x,y) f ( x , y ) 的滤波来实现。模板如下图:
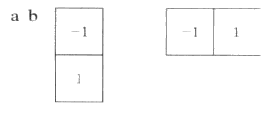
这样的一维模板及它的改进型Roberts交叉梯度算子2*2模板(检测对角线方向边缘),没有中心点对称。而有中心点对称最小得是3*3模板。那么用3*3的模板来近似偏导数的最简单的数字近似如下公式:(z 1~9是九宫格的顺序位置)
gx=∂f(x,y)∂x=(z7+z8+z9)−(z1+z2+z3) g x = ∂ f ( x , y ) ∂ x = ( z 7 + z 8 + z 9 ) − ( z 1 + z 2 + z 3 )
gy=∂f(x,y)∂y=(z3+z6+z9)−(z1+z4+z7) g y = ∂ f ( x , y ) ∂ y = ( z 3 + z 6 + z 9 ) − ( z 1 + z 4 + z 7 ) 其对应的滤波器模板是Prewitt。
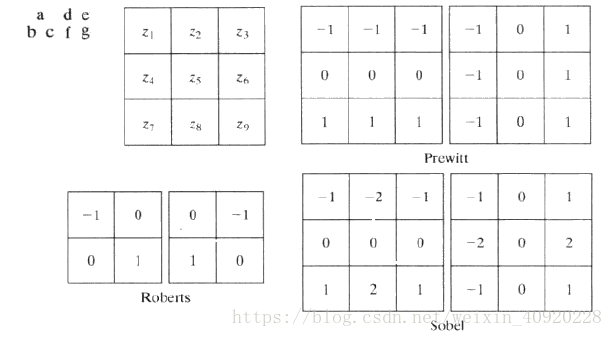
因为考虑了对称因素,Prewitt算子要比Robert算子得到的近似更准确。而在中心位置增加权重就得到了Sobel算子。
Sobel算子根据像素点上下、左右邻点灰度加权差,在边缘处达到极值这一现象检测边缘。对噪声具有平滑作用,提供较为精确的边缘方向信息,但边缘定位精度不够高(它会在灰度的分界线左右两侧各产生一条边缘,即sobel画出的边缘比较粗)。当对精度要求不是很高时,是一种较为常用的边缘检测方法。
实际应用中因为求平方再开根的运算开销大,会使用如下绝对值方式来近似梯度。

【详细的还是看书吧,书上已经说的够明白了,不知道要怎样才能简化摘录出来。】
14.编程题
卷积过程相关代码
Z1 = tf.nn.conv2d(X,W1, strides = [1,1,1,1], padding = ‘SAME’)
**Notation:**CONV2D: stride of 1, padding ‘SAME’
tf.nn.conv2d(input, filter, strides, padding, use_cudnn_on_gpu=None, name=None)
name参数用以指定该操作的name
第一个参数,input:指需要做卷积的输入图像,它要求是一个Tensor,具有[batch, in_height, in_width, in_channels]这样的shape,具体含义是[训练时一个batch的图片数量, 图片高度, 图片宽度, 图像通道数],注意这是一个4维的Tensor,要求类型为float32和float64其中之一。图像通道数可以是输入图像RGB的3通道,也可以是经过n个filter卷积后的n通道。
第二个参数,filter:相当于CNN中的卷积核,它要求是一个Tensor,具有[filter_height, filter_width, in_channels, out_channels]这样的shape,具体含义是[卷积核的高度,卷积核的宽度,图像通道数,卷积核个数],要求类型与参数input相同,有一个地方需要注意,第三维in_channels,就是参数input的第四维
第三个参数,strides:卷积时在图像每一维的步长,这是一个一维的向量,长度4。通常input的第一维是样本数m,第四维是channel,所以1,4维通常stride=1。strides=[1,s,s,1],s是在图像中卷积的步长。
第四个参数,padding:string类型的量,只能是”SAME”,”VALID”其中之一。”SAME”=padding,并且输出图像h*w等于输入图像h*w,”VALID”=no padding
第五个参数,use_cudnn_on_gpu:bool类型,是否使用cudnn加速,默认为true。
A1 = tf.nn.relu(Z1)
tf.nn.relu(features, name = None)
这个函数的作用是计算激活函数 relu,即 max(features, 0)。即将矩阵中每行的非最大值置0。
P1 = tf.nn.max_pool(A1, ksize = [1,8,8,1], strides = [1,8,8,1], padding = ‘SAME’)
**Notation:**MAXPOOL: window 8x8, sride 8, padding ‘SAME’
tf.nn.max_pool(value, ksize, strides, padding, name=None)
参数是四个,和卷积很类似:
第一个参数value:需要池化的输入,对应conv2d的input,一般池化层接在卷积层后面,所以输入通常是feature map,依然是[batch, height, width, channels]这样的shape
第二个参数ksize:池化窗口的大小,取一个四维向量,一般是[1, height, width, 1],因为我们不想在batch和channels上做池化,所以这两个维度设为了1
第三个参数strides:和卷积类似,窗口在每一个维度上滑动的步长,一般也是[1, stride,stride, 1]
第四个参数padding:和卷积类似,可以取’VALID’ 或者’SAME’
返回一个Tensor,类型不变,shape仍然是[batch, height, width, channels]这种形式
P2 = tf.contrib.layers.flatten(P2)
tf.contrib.layers.flatten(P)这个函数就是把P保留第一个维度,把第一个维度包含的每一子张量展开成一个行向量,返回张量是一个二维的, shape=(batch_size,….),一般用于卷积神经网络全链接层前的预处理
Z3 = tf.contrib.layers.fully_connected(P2, 6,activation_fn=None)
tf.contrib.layers.fully_connected(
inputs, num_outputs, activation_fn=tf.nn.relu, normalizer_fn=None, normalizer_params=None,
weights_initializer=initializers.xavier_initializer(), weights_regularizer=None,
biases_initializer=tf.zeros_initializer(), biases_regularizer=None,
reuse=None, variables_collections=None, outputs_collections=None,
trainable=True, scope=None)常用参数就3个
tf.contrib.layers.fully_connection(F,num_output,activation_fn)这个函数就是全链接成层
全连接实际上是完成一个 g(W*X+b),权重乘输入加偏置量再激活的过程。对应的w初始化由tensorflow自动完成,无需指定。
F是输入,num_output是下一层单元的个数,activation_fn是激活函数
- inputs: A tensor of at least rank 2 and static value for the last dimension; i.e. [batch_size, depth], [None, None, None, channels]
- num_outputs: Integer or long, the number of output units in the layer.
- activation_fn: Activation function. The default value is a ReLU function. Explicitly set it to None to skip it and maintain a linear activation.
cost = tf.reduce_mean(tf.nn.softmax_cross_entropy_with_logits(logits = Z3, labels = Y))
tf.nn.softmax_cross_entropy_with_logits(logits, labels, name=None)
除去name参数用以指定该操作的name,与方法有关的一共两个参数:
第一个参数,logits:就是神经网络最后一层的输出,如果有batch的话,它的大小就是[batchsize,num_classes],单样本的话,大小就是num_classes
第二个参数,labels:实际的标签,大小同上
tf交叉熵函数有4个:
- tf.nn.sigmoid_cross_entropy_with_logits(_sentinel=None, labels=None, logits=None, name=None)
- tf.nn.softmax_cross_entropy_with_logits(_sentinel=None, labels=None, logits=None, dim=-1, name=None)
- tf.nn.sparse_softmax_cross_entropy_with_logits(_sentinel=None, labels=None, logits=None, name=None)
- tf.nn.weighted_cross_entropy_with_logits(labels, logits, pos_weight, name=None)
tf.reduce_mean(input_tensor, reduction_indices=None, keep_dims=False, name=None)
参数1–input_tensor:待求值的tensor。
参数2–reduction_indices:在哪一维上求解。
参数(3)(4)可忽略
optimizer = tf.train.AdamOptimizer(learning_rate=learning_rate).minimize(cost)
此函数是Adam优化算法:是一个寻找全局最优点的优化算法,引入了二次方梯度校正。
相比于基础SGD算法,1.不容易陷于局部优点。2.速度更快