读书笔记《矩阵分析与计算》by 李继根 张新发
注:本篇博文是自己在阅读《矩阵分析与计算》一书中的记录,不喜勿喷,请绕道!
矩阵是线性空间里的变换的描述。从更高的层面看,矩阵是泛函中的一种特殊的线性算子。一般可将矩阵的理论知识大致划分为“空间与变换”,“矩阵分解论”以及“矩阵分析论”,其中空间与变换依托的就是泛函分析与抽象代数。
第一章 线性方程组
1.2 矩阵的LU分解
例:求解线性方程组

形如L这样的对角元都为1的下三角矩阵称为单位下三角矩阵。
如果方阵A可以分解为单位下三角矩阵L与上三角矩阵U的乘积,即A=LU,称为A的LU分解,或三角分解。
(LU分解定理)如果n阶方阵A的各阶顺序主子式都不为0,即A的各阶顺序主子式矩阵都可逆,则存在唯一的单位下三角矩阵L与唯一的非奇异上三角矩阵U,使得A=LU。
(LDU分解定理)如果n阶方阵A的各阶顺序主子式都不为0,则存在唯一的单位下三角矩阵L与唯一的单位上三角矩阵U以及对角矩阵D,使得A=LDU。
1.2.2 特殊矩阵的LU分解
当A为n阶实对称正定矩阵时,其所有顺序主子式>0,因此,根据上文LDU分解定理,A=LDU。从而![]() .
.
这里![]() 是单位下三角矩阵,
是单位下三角矩阵, 是单位上三角矩阵。因为
是单位上三角矩阵。因为 ,故
,故![]()
由LU分解的唯一性,可知![]()
即![]()
更进一步,由于A为实对称正定矩阵,因此对角矩阵D的对角元都为正数,若记![]()
则有![]()
(Cholesky定理/平方根法)设A是实对称正定矩阵,则存在唯一的可逆下三角矩阵L,使得![]()
(改进的平方根法)思考:根据![]() ,有
,有![]()
因此,可先解![]() ,再解
,再解![]() ,这种方法就避免了平方运算。这种改进的平方根法适用于任意对称矩阵(未必正定),除非出现主元为零的情况。
,这种方法就避免了平方运算。这种改进的平方根法适用于任意对称矩阵(未必正定),除非出现主元为零的情况。
1.4 线性方程组的数值解法概述
线性方程组求解,最小二乘问题,特征值问题是矩阵计算的三大基本问题
第二章 线性空间与线性变换
2.1 从解空间到向量空间
AX=0的解称为一个解空间。
向量空间:如果V是n维列向量的非空集合。并且V对于加法和数乘这两种向量运算都封闭,那么就称集合V为向量空间。
注:(1) 中不过原点的平面都不是向量空间。
中不过原点的平面都不是向量空间。
(2)若把向量空间V看做无穷个向量组成的向量组,那么V的基就是该向量组的极大无关组,V的维数就是该向量组的秩。
(3)对![]() 而言,其0维子空间是零空间
而言,其0维子空间是零空间![]() ,其一维子空间是经过原点的任意直线,其二维子空间是经过原点的任意平面,其三维子空间是其自身。
,其一维子空间是经过原点的任意直线,其二维子空间是经过原点的任意平面,其三维子空间是其自身。
2.2 线性空间
线性空间是向量空间在元素和线性运算上的推广和抽象,它的元素可以是向量,矩阵,多项式,函数等。它的线性运算既可以是我们熟悉的一般运算,也可以是各种特殊的运算,向量空间中的线性组合,线性相关,线性无关,基,坐标等定义和结论都可以推广到一般线性空间,尤其是坐标,能够将一般线性空间的问题转化成向量空间的问题。
2.2.2线性空间的概念及性质
注:(1)在线性空间V的定义中。不仅不再关心元素的特定属性,而且也不关心这些线性运算(即加法和数乘)的具体形式
(2)数域被推广到了更一般的数域F,例如实数域 和复数域
和复数域![]() ,此时相应的线性空间分别被称为实空间和复空间
,此时相应的线性空间分别被称为实空间和复空间
(3)线性空间是线性代数的最基本概念之一,概括的说,它要求的是“两种封闭运算和八条运算规律”
(4)再次强调:线性空间中的元素可以是向量,矩阵,多项式,函数等,其中的线性运算可以任意指定,而且同一个线性空间还可以指定不同的线性运算。
到此时才发现自己对“线性代数”中的“线性”完全没理解啊!!
2.2.4 线性空间的同构
(同态映射)设![]() ,
, 是数域F上的两个线性空间,
是数域F上的两个线性空间,![]() 是
是![]() 到的映射(未必一一对应),如果对任意
到的映射(未必一一对应),如果对任意![]() ,
,
![]() 和任意
和任意![]() F,都有
F,都有
(1)可加性:![]()
(2)齐次性:![]()
则称![]() 为
为![]() 到的同态映射,线性映射或线性算子。特别地,当为F时,称
到的同态映射,线性映射或线性算子。特别地,当为F时,称![]() 为
为![]() 上的线性泛函。当
上的线性泛函。当![]() 与是同一个线性空间
与是同一个线性空间 时,称
时,称![]() 为上的自同态映射或线性变换。
为上的自同态映射或线性变换。
(同构映射)设![]() ,是数域F上的两个线性空间,
,是数域F上的两个线性空间,![]() 是
是![]() 到的同态映射,并且是一一对应的,则称
到的同态映射,并且是一一对应的,则称![]() 为
为![]() 到的线性同构映射。同构映射是特殊的同态映射。
到的线性同构映射。同构映射是特殊的同态映射。
维数是有限维线性空间唯一的本质特征。
2.3 子空间的交与和
我们希望将一个高维线性空间分解为多个低维线性子空间的和,并通过对线性子空间的研究,更加深刻地揭示整个线性空间的结构。
2.4 线性变换及其矩阵表示
线性变换是线性空间的核心内容,反映的是线性空间中元素间的一种基本联系,体现出一种“动态的”或者“直观的”视角。借助基的概念,可在线性变换与矩阵之间建立一一对应关系,从而将线性变换的运算转化为矩阵的运算。
2.4.1 几个简单的线性变换
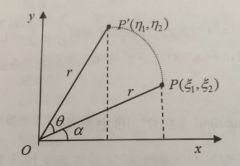
(旋转变换或Givens变换)将 中的任意向量
中的任意向量![]() ,绕原点逆时针旋转角
,绕原点逆时针旋转角 至
至![]()
则![]()
![]()
(反射变换或Householder变换)
(伸缩变换)
(投影变换)
(微分变换)
(积分变换)
注:(1)平移变换不是线性变换,而伸缩变换,投影变换是线性变换。
(2)将具体的矩阵与抽象的线性映射联系起来,从而将线性映射的运算转化为矩阵的数值计算。这中间的桥梁,就是与坐标轴类似的线性空间的基。
2.4.3 线性变换的矩阵表示
思考:为什么![]()
分析:在 中,记
中,记![]() ,显然当
,显然当![]() 时,有
时,有
![]()
记为G,故![]() ,
,![]()
退化到一维的情形。此时![]() ,
,![]()
即![]()
注:(1)同一个线性变换在不同基下的矩阵是相似的;反之,相似的两个矩阵可看成同一个线性变换在不同基下的矩阵。
(2)从变换角度理解特征值
定义:设![]() 是在数域F上线性空间V的一个线性变换,如果存在
是在数域F上线性空间V的一个线性变换,如果存在![]() ,及非零向量
,及非零向量![]() ,使得
,使得![]()
则称 为
为![]() 的特征值,称非零向量
的特征值,称非零向量 为
为![]() 的属于特征值的特征向量。
的属于特征值的特征向量。
显然,特征向量经过![]() 变换以后,仍然与成倍数关系(倍数就是特征值),即线性相关或共线。
变换以后,仍然与成倍数关系(倍数就是特征值),即线性相关或共线。
(3)对任一矩阵 ,矩阵的特征值的集合称为的谱(spectrum),的特征值的模的最大值称为的谱半径。
,矩阵的特征值的集合称为的谱(spectrum),的特征值的模的最大值称为的谱半径。
2.5 矩阵的Jordan标准型
从逻辑上看,标准型的理论源自矩阵的相似性,因为相似矩阵有许多相似不变量:特征多项式,特征值(包括代数重数和几何重数),行列式,迹和秩等,并且特征向量也可以借助于可逆矩阵的相似变换矩阵互相求出,这自然导出了寻找相似矩阵集合中的“代表矩阵”的问题。“代表矩阵”当然越简单越好,对于可对角化矩阵。“代表矩阵”就是特征值组成的对角矩阵,但一般矩阵未必与对角矩阵相似。因此我们只能退而求其次,寻找“几乎对角的”矩阵,这就引出了矩阵在相似变换下的各种标准型问题,其中Jordan标准型是最接近对角的矩阵,因为除了对角元之外,它只在第1条对角线上另取0或1.
第三章 内积空间
在线性空间中,只涉及了向量的线性运算。可是在作为线性空间具体模型的向量空间中,还涉及向量的长度,夹角等度量性质,它们在解决几何问题时起着关键作用,因此必须把度量的概念引入到线性空间中来,以实现代数与几何的完美结合。
3.1 从向量空间到欧式空间
将3维空间中的点积推广到n维向量空间,就是向量的内积。为了区别于向量空间,称带有标准内积的向量空间为欧式空间。
3.2 QR分解
QR分解在矩阵计算中占据相当重要的地位,利用QR分解,可以解决各种应用中出现的最小二乘问题,特征值问题等矩阵计算中的核心问题。
设 ,
, ,...
,... 是欧式空间的一组基,
是欧式空间的一组基, ,
, ,...
,... 是我们希望得到的正交基
是我们希望得到的正交基
 、
、
重要思想:Schmidt过程实际上是逐步扩张正交向量组,使得
![]()
并且
使用矩阵语言,就是Q=AT
由于上三角矩阵的逆矩阵仍然是上三角矩阵,令R=
![]() ,所以A=QR
,所以A=QR
(QR分解定义)对于n阶方阵A,如果存在正交矩阵Q和上三角矩阵R,使得A=QR,则称该式为A的完全QR分解。
3.3 欧式空间与其标准正交基
向量空间中向量的长度与夹角是用内积定义的,引入这些度量后的线性空间,自然就推广为内积空间。在内积空间内引入标准正交基后,向量的内积运算就转化成了我们熟悉的向量空间的内积运算。
注意:
(1)内积实际上是一种映射,是双线性函数,这样同一个线性空间显然可定义多种内积
(2)欧式空间仅仅是一种特殊的欧式空间
(3)由于向量的内积与向量的线性运算无关,所以欧式空间V实际上是特殊的线性空间V,即定义了内积的线性空间。
(希尔伯特空间定义)希尔伯特空间![]() 是所有平方和收敛的实数列的集合。
是所有平方和收敛的实数列的集合。

注:(1)在小波分析和有限元等学科中,小波基和有限元实际上也是相应欧式空间的正交基函数
(2)矩阵分解为三角矩阵,对角矩阵,正交矩阵等特殊矩阵的乘机
3.6 酉空间,酉变换与酉矩阵
| 拓扑空间 | 线性空间 | |||
|---|---|---|---|---|
| Hausdorff空间 | 拓扑线性空间 | |||
| 距离空间 | 距离线性空间 | 完备距离线性空间 | ||
| 赋范空间 | Banach空间 | |||
| 内积空间 | Hibert空间 | |||
| 欧式空间 |
![]() 是矩阵的复共轭转置矩阵
是矩阵的复共轭转置矩阵
称满足![]() 的矩阵为Hermite矩阵。
的矩阵为Hermite矩阵。
注:酉矩阵是正交矩阵的推广,Hermite矩阵是对称矩阵的推广。
第四章 特殊变换及其矩阵
例如:上三角矩阵,下三角矩阵,三对角矩阵,带状矩阵,对称矩阵,Hermite矩阵,正交矩阵,酉矩阵,正规矩阵,投影矩阵,Toeplitz矩阵,Frobenius矩阵,Vandermonde矩阵,Z矩阵,M矩阵,H矩阵,对角占优矩阵,非负矩阵,友矩阵,协方差矩阵,随机矩阵,Hamilton矩阵,辛矩阵,Hilbert矩阵,Cauchy矩阵,Leslie矩阵,幂等矩阵,幂零矩阵,循环矩阵等。
4.1 正规变换与正规矩阵
关注的是对角化的问题
4.2 Hermite变换与Hermite矩阵
关注的是对称的问题
4.3投影变换与投影矩阵
拉格朗日乘子法增加空间维数,投影方法将高维问题降维为低维问题。
几种特殊矩阵之间的关系

4.4 谱分解的应用-主成分分析
第一步:降维
第二步:正交化
第三步:能量最大化
4.5 矩阵的奇异值分解(SVD)
SVD分解与特征值分解的区别
(1)基的数目不同,SVD用了两组不同的基(左奇异向量和右奇异向量),而特征值分解只用一组基(特征向量)
(2)基的性质不一样,SVD使用了正交基,而特征值分解所用的基未必正交
(3)适用的矩阵不一样,SVD适用于所有矩阵,而特征值分解只适用于特定的方阵
(4)应用范围不同,SVD趋于侧重包含矩阵自身及其逆的问题,而特征值则趋于侧重包含有迭代的问题(如矩阵的幂及矩阵指数函数)
总结:SVD深刻揭示了矩阵的结构,即矩阵的秩
第五章 范数(norm)及其应用
范数是向量到实数的一种映射(函数),对向量这个兼具大小与方向即数与形的数学对象,范数度量的是向量的大小,即向量数的一面。
5.1 向量范数
(范数的定义)设V是数域F上的线性空间,对任意向量![]() ,按照某种对应规则,都有一个非负实数
,按照某种对应规则,都有一个非负实数 与之对应,并且对任意
与之对应,并且对任意![]() 及任意,
及任意,![]() ,都满足下列三个性质:
,都满足下列三个性质:
(1)正定性:![]() ;当且仅当
;当且仅当![]() 时,=0
时,=0
(2)正齐性:![]()
(3)三角不等式:![]()
则称是向量的范数,并称定义了范数的线性空间V为赋范线性空间。
注:
(1)范数未必都可由内积导出。
(2)内积空间是特殊的赋范线性空间。
常见范数:
(1)1范:![]()
(2)2范:![]()
(3)p范:![]()
(4)无穷范:![]()
(5)椭圆范数:![]() (注:椭圆范数是用二范的形式定义的,说明可以从已知范数构造新的范数)
(注:椭圆范数是用二范的形式定义的,说明可以从已知范数构造新的范数)
(二维向量的几种范数的几何意义)

(常见的距离测度)
(1)欧氏距离:
(2)绝对值距离:
(3)切氏距离:![]()
(4)闵氏距离:
(5)马氏距离:![]()
马氏距离分析:这里的x,y是从整体![]() 中抽取的两个样本,如果x,y来自两个数据集,则将S改为互协方差矩阵C(而前面4个距离描述的都是两个向量之间的距离)
中抽取的两个样本,如果x,y来自两个数据集,则将S改为互协方差矩阵C(而前面4个距离描述的都是两个向量之间的距离)
注意:
(1)尽管各种范数大小不同,但作为度量用的不同“尺子”,它们对外表现出明显的一致性,正所谓“内斗外和”,这种性质就是范数的等价性
(2)处理向量问题,例如向量序列敛散性问题,我们可以基于一种范数来建立理论,而使用另一种范数来进行计算。
总结:无意间发现了宝贝,这本书对于矩阵学习者来说,更确切的说,是对于矩阵进阶学习者来说,是很好的书。从本科的基础知识引入,配上生动的故事,将原本复杂的概念娓娓道来。强烈推荐!
雅克比的一句有趣的话:如果你父亲坚持要先认识世界上所有的姑娘,然后再跟其中一个结婚,那他就永远不会结婚,而你现在也就不会在这里。