ORB特征检测原理(含使用代码)
文章目录
- 概要(简述)
- 1)寻找特征点:
- 2)描述特征点:
- 3)特征点匹配:
- 使用方法
- 1)opencv中调用方法
- 2)实际代码使用方法
- 附录(详解)(转)
- 1.特征点的检测
- 2.特征点的描述
- 2.1 计算特征描述子
- 2.2 理想的特征点描述子应该具备的属性
- 3.特征点的匹配
概要(简述)
ORB - (Oriented Fast and Rotated BRIEF)算法是基于FAST特征检测与BRIEF特征描述子匹配实现,相比BRIEF算法中依靠随机方式获取而值点对,ORB通过FAST方法,FAST方式寻找候选特征点方式是假设灰度图像像素点A周围的像素存在连续大于或者小于A的灰度值,ORB的步骤如下:
1)寻找特征点:
在要观察的像素点P周围找多个点进行比较,为了加快过程,一般为16、12、9或4个进行比较;如果满足周围有连续的多个点的像素同时大于或同时小于P点的像素,则像素点P被标记为候选特征点,然后通过阈值进行最终的筛选即可得到ORB特征点。
2)描述特征点:
使用BRIEF构建特征描述子,首先在P点周围找特征点对,然后对选取的点对进行T操作,得到0和1 的序列,可按照点对的位置进行排列;
3)特征点匹配:
用2)构建的特征描述子(1和0组成的二进制序列)进行比较,相似度=(相同的个数)/(总个数);这就要求两个特征的描述子大小和顺序必须相同。
使用方法
1)opencv中调用方法
static Ptr<ORB> cv::ORB::create (
int nfeatures = 500, //nfeatures 最终输出最大特征点数目
float scaleFactor = 1.2f, // scaleFactor 金字塔上采样比率
int nlevels = 8, // nlevels 金字塔层数
int edgeThreshold = 31, // edgeThreshold 边缘阈值
int firstLevel = 0,
int WTA_K = 2, // WTA_K这个是跟BRIEF描述子用的
ORB::ScoreType scoreType = ORB::HARRIS_SCORE, // scoreType 对所有的特征点进行排名用的方法
int patchSize = 31,
int fastThreshold = 20
)
2)实际代码使用方法
#include
#include
using namespace cv;
using namespace std;
int main(int argc, char** argv) {
Mat src = imread("test.png");
auto orb_detector = ORB::create(1000);
vector kpts;
orb_detector->detect(src, kpts);
Mat result = src.clone();
drawKeypoints(src, kpts, result, Scalar::all(-1), DrawMatchesFlags::DEFAULT);
imshow("ORB-detector", result);
imwrite("result.png", result);
waitKey(0);
return 0;
}
附录(详解)(转)
下面为实际参考的文章,一并附上,转载请注明出处:http://blog.csdn.net/yang843061497/article/details/38553765
1.特征点的检测
图像的特征点可以简单的理解为图像中比较显著显著的点,如轮廓点,较暗区域中的亮点,较亮区域中的暗点等。

ORB采用FAST(features from accelerated segment test)算法来检测特征点。FAST核心思想就是找出那些卓尔不群的点,即拿一个点跟它周围的点比较,如果它和其中大部分的点都不一样就可以认为它是一个特征点。
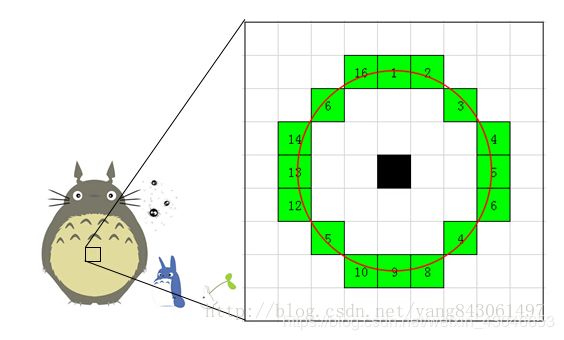
备注:每个小方格代表一个像素,方格内的颜色只是为了便于区分,不代表该像素点的颜色。
FAST具体计算过程:
-
从图片中选取一个像素点P,下面我们将判断它是否是一个特征点。我们首先把它的密度(即灰度值)设为Ip。
-
设定一个合适的阙值t :当2个点的灰度值之差的绝对值大于t时,我们认为这2个点不相同。
-
考虑该像素点周围的16个像素。(见上图)
-
现在如果这16个点中有连续的n个点都和点不同,那么它就是一个角点。 这里n设定为12。
-
我们现在提出一个高效的测试,来快速排除一大部分非特征点的点。该测试仅仅检查在位置1、9、5和13四个位置的像素(首先检查1和9,看它们是否和点相同。如果是,再检查5和13)。如果是一个角点,那么上述四个像素点中至少有3个应该和点相同。如果都不满足,那么不可能是一个角点。

图中红色的点为使用FAST算法找到的特征点。
2.特征点的描述
2.1 计算特征描述子
得到特征点后我们需要以某种方式F描述这些特征点的属性。这些属性的输出我们称之为该特征点的描述子(Feature DescritorS).ORB采用BRIEF算法来计算一个特征点的描述子。BRIEF算法的核心思想是在关键点P的周围以一定模式选取N个点对,把这N个点对的比较结果组合起来作为描述子。
具体来讲分为以下几步。
1.以关键点P为圆心,以d为半径做圆O。
2.在圆O内某一模式选取N个点对。这里为方便说明,N=4,实际应用中N可以取512.
假设当前选取的4个点对如上图所示分别标记为:

3.定义操作T
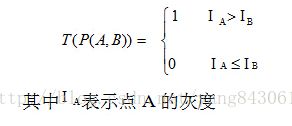
4.分别对已选取的点对进行T操作,将得到的结果进行组合。
假如:
则最终的描述子为:1011
2.2 理想的特征点描述子应该具备的属性
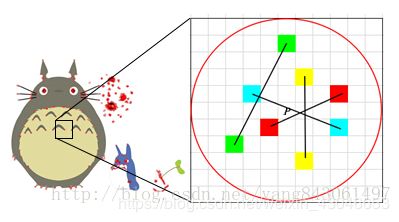
在现实生活中,我们从不同的距离,不同的方向、角度,不同的光照条件下观察一个物体时,物体的大小,形状,明暗都会有所不同。但我们的大脑依然可以判断它是同一件物体。理想的特征描述子应该具备这些性质。即,在大小、方向、明暗不同的图像中,同一特征点应具有足够相似的描述子,称之为描述子的可复现性。
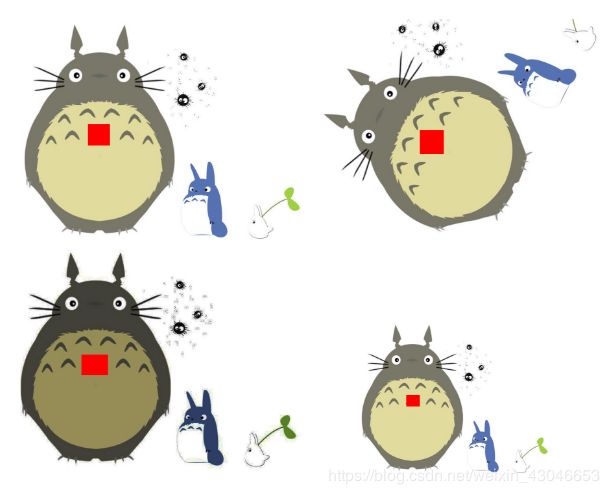
当以某种理想的方式分别计算上图中红色点的描述子时,应该得出同样的结果。即描述子应该对光照(亮度)不敏感,具备尺度一致性(大小 ),旋转一致性(角度)等。
上面我们用BRIEF算法得到的描述子并不具备以上这些性质。因此我们得想办法改进我们的算法。ORB并没有解决尺度一致性问题,在OpenCV的ORB实现中采用了图像金字塔来改善这方面的性能。ORB主要解决BRIEF描述子不具备旋转不变性的问题。
回顾一下BRIEF描述子的计算过程:在当前关键点P周围以一定模式选取N个点对,组合这N个点对的T操作的结果就为最终的描述子。当我们选取点对的时候,是以当前关键点为原点,以水平方向为X轴,以垂直方向为Y轴建立坐标系。当图片发生旋转时,坐标系不变,同样的取点模式取出来的点却不一样,计算得到的描述子也不一样,这是不符合我们要求的。因此我们需要重新建立坐标系,使新的坐标系可以跟随图片的旋转而旋转。这样我们以相同的取点模式取出来的点将具有一致性。
打个比方,我有一个印章,上面刻着一些直线。用这个印章在一张图片上盖一个章子,图片上分处直线2头的点将被取出来。印章不变动的情况下,转动下图片,再盖一个章子,但这次取出来的点对就和之前的不一样。为了使2次取出来的点一样,我需要将章子也旋转同一个角度再盖章。(取点模式可以认为是章子上直线的分布情况)
ORB在计算BRIEF描述子时建立的坐标系是以关键点为圆心,以关键点和取点区域的形心的连线为X轴建立2维坐标系。
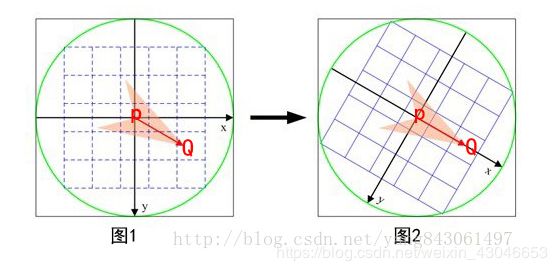
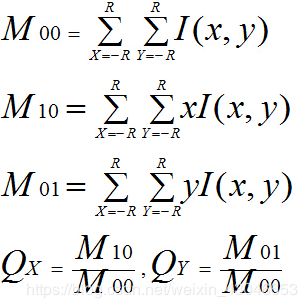
在图1中,P为关键点。圆内为取点区域,每个小格子代表一个像素。现在我们把这块圆心区域看做一块木板,木板上每个点的质量等于其对应的像素值。根据积分学的知识我们可以求出这个密度不均匀木板的质心Q。计算公式如下。其中R为圆的半径。
我们知道圆心是固定的而且随着物体的旋转而旋转。当我们以PQ作为坐标轴时(图2),在不同的旋转角度下,我们以同一取点模式取出来的点是一致的。这就解决了旋转一致性的问题。
3.特征点的匹配
ORB算法最大的特点就是计算速度快 。 这首先得益于使用FAST检测特征点,FAST的检测速度正如它的名字一样是出了名的快。再次是使用BRIEF算法计算描述子,该描述子特有的2进制串的表现形式不仅节约了存储空间,而且大大缩短了匹配的时间。
例如特征点A、B的描述子如下。
A:10101011
B:10101010
我们设定一个阈值,比如80%。当A和B的描述子的相似度大于90%时,我们判断A,B是相同的特征点,即这2个点匹配成功。在这个例子中A,B只有最后一位不同,相似度为87.5%,大于80%。则A和B是匹配的。
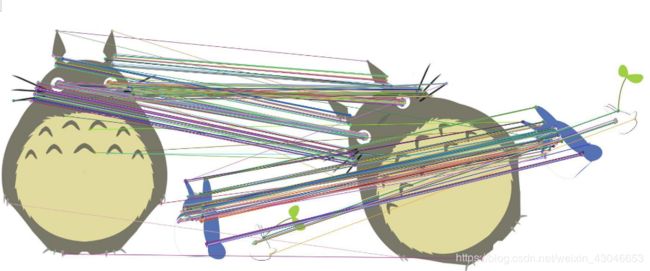
我们将A和B进行异或操作就可以轻松计算出A和B的相似度。而异或操作可以借组硬件完成,具有很高的效率,加快了匹配的速度。匹配结果如下。