DGL官方教程--线性图神经网络(Line graph neural network)
Note:
Click here to download the full example code
Line graph neural network
Author: Qi Huang, Yu Gai, Minjie Wang, Zheng Zhang
在本教程中,您将学习如何通过实现折线图神经网络(LGNN)解决社区检测任务。社区检测或图聚类包括将图中的顶点划分为群集,在群集中节点之间更加相似。
在“ 图卷积网络”教程中,您学习了如何在半监督设置中对输入图的节点进行分类。您使用图卷积神经网络(GCN)作为图特征的嵌入机制。
为了将图神经网络(GNN)概括为有监督的社区检测,在研究论文《基于线图神经网络的有监督的社区检测》中引入了基于线图的GNN变异 。该模型的亮点之一是增强了直接的GNN架构,使其可以在使用非回溯运算符定义的边缘邻接的折线图中进行操作。
线图神经网络(LGNN)显示了DGL如何通过混合基本张量运算,稀疏矩阵乘法和消息传递API来实现高级图算法。
在以下各节中,您将了解社区检测,线图,LGNN及其实现。
Supervised community detection task with the Cora dataset
Community detection
在社区检测任务中,您将相似的节点聚类而不是对其进行标记。通常将节点相似性描述为在每个群集中具有较高的内部密度。
社区检测和节点分类有什么区别?与节点分类相比,社区检测的重点是检索图中的聚类信息,而不是为节点分配特定的标签。例如,只要节点与其社区成员一起集群,则在将所有“大电影”分配给“坏电影”标签的同时,将节点分配为“社区A”还是“社区B”都没有关系。电影网络分类任务将是一场灾难。
那么,社区检测算法和其他聚类算法(例如k-means)有什么区别?社区检测算法对图结构数据进行操作。与k-means相比,社区检测利用图结构,而不是仅基于节点的特征对其进行聚类。
Cora dataset
为了与GCN教程保持一致,您可以使用Cora数据集 来说明一个简单的社区检测任务。Cora是一个科学出版物数据集,拥有2708篇论文,属于七个不同的机器学习领域。在这里,您将Cora公式化为有向图,每个节点为纸,每个边为引用链接(A-> B表示A引用B)。这是整个Cora数据集的可视化。
图片地址:https://i.imgur.com/X404Byc.png
Cora自然包含七个类,并且下面的统计数据表明每个类确实满足我们对社区的假设,即,相同类类的节点之间的连接概率要高于不同类节点的连接概率。以下代码片段验证了类内边缘多于类间边缘。
import torch
import torch as th
import torch.nn as nn
import torch.nn.functional as F
import dgl
from dgl.data import citation_graph as citegrh
data = citegrh.load_cora()
G = dgl.DGLGraph(data.graph)
labels = th.tensor(data.labels)
# find all the nodes labeled with class 0
label0_nodes = th.nonzero(labels == 0).squeeze()
# find all the edges pointing to class 0 nodes
src, _ = G.in_edges(label0_nodes)
src_labels = labels[src]
# find all the edges whose both endpoints are in class 0
intra_src = th.nonzero(src_labels == 0)
print('Intra-class edges percent: %.4f' % (len(intra_src) / len(src_labels)))
out:
Intra-class edges percent: 0.7680
Binary community subgraph from Cora with a test dataset
不失一般性,在本教程中,您将任务范围限制为二进制社区检测。
Note:
要从Cora创建实践二进制社区数据集,请首先从原始Cora的七个类中提取所有两个类对。对于每对,您将每个班级视为一个社区,并找到至少包含一个跨社区边缘的最大子图作为训练示例。结果,在这个小数据集中总共有21个训练样本。
使用以下代码,您可以可视化其中一个培训样本及其社区结构。
import networkx as nx
import matplotlib.pyplot as plt
train_set = dgl.data.CoraBinary()
G1, pmpd1, label1 = train_set[1]
nx_G1 = G1.to_networkx()
def visualize(labels, g):
pos = nx.spring_layout(g, seed=1)
plt.figure(figsize=(8, 8))
plt.axis('off')
nx.draw_networkx(g, pos=pos, node_size=50, cmap=plt.get_cmap('coolwarm'),
node_color=labels, edge_color='k',
arrows=False, width=0.5, style='dotted', with_labels=False)
visualize(label1, nx_G1)

要了解更多信息,请访问原始研究论文,以了解如何将其推广到多个社区的案例。
Community detection in a supervised setting
社区检测问题可以通过有监督和无监督的方法来解决。您可以在受监管的环境中制定社区检测,如下所示:
- 每个培训示例包括 ( G , L ) (G,L) (G,L),在哪里 G G G 是有向图 ( V , E ) (V,E) (V,E)。对于每个节点 v v v 在 V V V,我们分配一个地面真相社区标签 z v ∈ { 0 , 1 } z_v \in \{0,1\} zv∈{0,1}。
- 参数化模型 f ( G , θ ) f(G, \theta) f(G,θ) 预测标签集 Z ~ = f ( G ) \tilde{Z} = f(G) Z~=f(G) 对于节点 V V V。
- 对于每个示例 ( G , L ) (G,L) (G,L),模型将学习如何最大限度地减少专门设计的损失函数(等价损失) L e q u i v a r i a n t = ( Z ~ , Z ) L_{equivariant} = (\tilde{Z},Z) Lequivariant=(Z~,Z)
注意:
在这种监督下,模型自然可以为每个社区预测标签。但是,社区分配应与标签排列等价。为了实现这一点,在每个正向过程中,我们将根据标签的所有可能排列计算得出的损耗中的最小值。
从数学上讲,这意味着 L e q u i v a r i a n t = m i n π ∈ S c − log ( π ^ , π ) L_{equivariant} = \underset{\pi \in S_c} {min}-\log(\hat{\pi}, \pi) Lequivariant=π∈Scmin−log(π^,π)在哪里 S c S_c Sc 是标签的所有排列的集合,并且 π ^ \hat{\pi} π^是一组预测标签, − log ( π ^ , π ) - \log(\hat{\pi},\pi) −log(π^,π)表示对数可能性为负。
例如,对于带有节点的样本图 {1,2,3,4} 和社区任务 {A,A,A,B},带有每个节点的标签 l∈{0,1},所有可能排列的组 Sc={{0,0,0,1},{1,1,1,0}}。
Line graph neural network key ideas
该主题的一项关键创新是折线图的使用。与先前教程中的模型不同,消息传递不仅发生在原始图(例如,来自Cora的二进制社区子图)上,而且发生在与原始图关联的线图上。
What is a line-graph?
在图论中,线图是对原始图的边缘邻接结构进行编码的图表示。
具体来说,是折线图 L(G)将原始图G的边缘 变成一个节点。如下图所示(摘自研究论文)。
图片地址:https://i.imgur.com/4WO5jEm.png
这里, e A : = ( i → j ) e_{A}:= (i\rightarrow j) eA:=(i→j) 和 e B : = ( j → k ) e_{B}:= (j\rightarrow k) eB:=(j→k) 是原始图中的两条边 G G G。线状图 G L G_L GL,它们对应于节点 v A l , v B l v^{l}_{A}, v^{l}_{B} vAl,vBl。
下一个自然的问题是,如何连接线图中的节点?如何连接两个边?在这里,我们使用以下连接规则:
两个节点 v A l , v B l v^{l}_{A}, v^{l}_{B} vAl,vBl如果对应的两个边在 l g lg lg中连接 e A , e B e_{A}, e_{B} eA,eB在 g g g中共享一个且仅一个节点: e A e_{A} eA的目标节点是 e B e_{B} eB的源节点 ( j ) (j) (j)。
注意:
从数学上讲,此定义对应于一个称为非回溯运算符的概念: B ( i → j ) , ( i ^ → j ^ ) B_{(i \rightarrow j), (\hat{i} \rightarrow \hat{j})} B(i→j),(i^→j^), = { 1 if j = i ^ , j ^ ≠ i 0 otherwise = \begin{cases} 1 \text{ if } j = \hat{i}, \hat{j} \neq i\\ 0 \text{ otherwise} \end{cases} ={1 if j=i^,j^=i0 otherwise 如果形成边缘 B n o d e 1 , n o d e 2 = 1 B_{node1, node2} = 1 Bnode1,node2=1。
One layer in LGNN, algorithm structure
LGNN将一系列线形图神经网络层链接在一起。图形表示x 和它的线图伴侣 y 随数据流的变化如下。
图片地址:https://i.imgur.com/bZGGIGp.png
在 k − k- k−第层 i i i的第神经元 l频道更新其嵌入 x i , l ( k + 1 ) x^{(k+1)}_{i,l} xi,l(k+1)与:
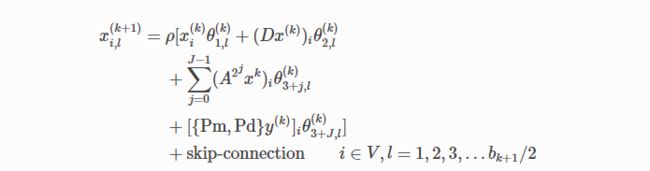
然后,线图表示 y i , l ( k + 1 ) y^{(k+1)}_{i,l} yi,l(k+1)与,

哪里 skip-connection 指执行相同的操作而没有非线性 ρ和线性投影 θ { b k + 1 2 + 1 , . . . , b k + 1 − 1 , b k + 1 } \theta_\{\frac{b_{k+1}}{2} + 1, ..., b_{k+1}-1, b_{k+1}\} θ{2bk+1+1,...,bk+1−1,bk+1}和 γ { b k + 1 2 + 1 , . . . , b k + 1 − 1 , b k + 1 } \gamma_\{\frac{b_{k+1}}{2} + 1, ..., b_{k+1}-1, b_{k+1}\} γ{2bk+1+1,...,bk+1−1,bk+1}。
Implement LGNN in DGL
即使上一节中的方程式可能看起来令人生畏,但在实施LGNN之前有助于理解以下信息。
这两个方程是对称的,可以实现为具有不同参数的同一类的两个实例。第一个方程对图表示起作用 x x x,而第二个则以线形图表示 y y y。让我们将这种抽象表示为 f f f。那么第一个是 f ( x , y ; θ x ) f(x,y; \theta_x) f(x,y;θx),第二个是 f ( y , x , θ y ) f(y,x, \theta_y) f(y,x,θy)。也就是说,将它们参数化以分别计算原始图及其伴随线图的表示形式。
每个方程式由四个项组成。下面以第一个为例。
- x ( k ) θ 1 , l ( k ) x^{(k)}\theta^{(k)}_{1,l} x(k)θ1,l(k),前一层输出的线性投影 x ( k ) x^{(k)} x(k),表示为 prev ( x ) \text{prev}(x) prev(x)。
- ( D x ( k ) ) θ 2 , l ( k ) (Dx^{(k)})\theta^{(k)}_{2,l} (Dx(k))θ2,l(k),度算子在上的线性投影 x ( k ) x^{(k)} x(k),表示为 deg ( x ) \text{deg}(x) deg(x)。
- ∑ j = 0 J − 1 ( A 2 j x ( k ) ) θ 3 + j , l ( k ) \sum^{J-1}_{j=0}(A^{2^{j}}x^{(k)})\theta^{(k)}_{3+j,l} ∑j=0J−1(A2jx(k))θ3+j,l(k),是 2 j 2^{j} 2j 邻接运算符 x ( k ) x^{(k)} x(k),表示为 radius ( x ) \text{radius}(x) radius(x).
- [ { P m , P d } y ( k ) ] θ 3 + J , l ( k ) [\{Pm,Pd\}y^{(k)}]\theta^{(k)}_{3+J,l} [{Pm,Pd}y(k)]θ3+J,l(k) ,使用关联矩阵融合另一个图的嵌入信息 { P m , P d } \{Pm, Pd\} {Pm,Pd},然后是线性投影,表示为 fuse ( y ) \text{fuse}(y) fuse(y)。
再次使用不同的参数执行每个项,并且求和后没有非线性。因此, f f f 可以写成:

两个方程按以下顺序链接起来:

请记住本概述中列出的意见,然后继续执行。重要的一点是,您对提到的术语使用不同的策略。
注意:
你能明白 { P m , P d } \{Pm, Pd\} {Pm,Pd}对此解释进行更彻底的介绍。大致来说, g g g 和 l g lg lg(折线图)与循环简短传播协同工作。在这里,您实现 { P m , P d } \{Pm, Pd\} {Pm,Pd}作为数据集中的SciPy COO稀疏矩阵,并在批处理时将它们堆叠为张量。另一个批处理解决方案是 { P m , P d } \{Pm, Pd\} {Pm,Pd} 作为二部图的邻接矩阵,它将线图的特征映射到图的特征,反之亦然。
Implementing prev and deg as tensor operation
线性投影和度运算都是简单的矩阵乘法。将它们编写为PyTorch张量操作。
在中**init**,您可以定义投影变量。
self.linear_prev = nn.Linear(in_feats, out_feats)
self.linear_deg = nn.Linear(in_feats, out_feats)
在forward(), p r e v prev prev 和 d e g deg deg 与任何其他PyTorch张量操作相同。
prev_proj = self.linear_prev(feat_a)
deg_proj = self.linear_deg(deg * feat_a)
Implementing radius as message passing in DGL
正如GCN教程中讨论的那样,您可以将一个邻接运算符表述为一步传递消息。作为概括, 2 j 2^j 2j 邻接操作可以表述为执行 2 j 2^j 2j消息传递的步骤。因此,求和等于对节点的表示进行求和。 2 j , j = 0 , 1 , 2.. 2^j, j=0, 1, 2.. 2j,j=0,1,2.. 传递步骤消息,即收集信息 2 j 2^j 2j 每个节点的邻域。
在__init__中,定义每个中使用的投影变量 2 j 2^j 2j消息传递的步骤。
self.linear_radius = nn.ModuleList(
[nn.Linear(in_feats, out_feats) for i in range(radius)])
在中__forward__,使用以下功能aggregate_radius()从多个跃点收集数据。在以下代码中可以看到。请注意,update_all多次调用。
# Return a list containing features gathered from multiple radius.
import dgl.function as fn
def aggregate_radius(radius, g, z):
# initializing list to collect message passing result
z_list = []
g.ndata['z'] = z
# pulling message from 1-hop neighbourhood
g.update_all(fn.copy_src(src='z', out='m'), fn.sum(msg='m', out='z'))
z_list.append(g.ndata['z'])
for i in range(radius - 1):
for j in range(2 ** i):
#pulling message from 2^j neighborhood
g.update_all(fn.copy_src(src='z', out='m'), fn.sum(msg='m', out='z'))
z_list.append(g.ndata['z'])
return z_list
在__forward__中:
fuse = self.linear_fuse(th.mm(pm_pd, feat_b))
Implementing fuse as sparse matrix multiplication
{ P m , P d } \{Pm, Pd\} {Pm,Pd}是一个稀疏矩阵,每列上只有两个非零条目。因此,您可以将其构造为数据集中的稀疏矩阵,然后实施 f u s e fuse fuse 作为稀疏矩阵乘法。
Completing f ( x , y ) f(x,y) f(x,y)
最后,以下内容显示了如何将所有术语汇总在一起,将其传递给跳过连接以及批处理规范。
result = prev_proj + deg_proj + radius_proj + fuse
传递结果以跳过连接。
result = th.cat([result[:, :n], F.relu(result[:, n:])], 1)
然后将结果传递给批处理规范。
result = self.bn(result) #Batch Normalization.
这是一个LGNN层抽象的完整代码 f ( x , y ) f(x,y) f(x,y)
class LGNNCore(nn.Module):
def __init__(self, in_feats, out_feats, radius):
super(LGNNCore, self).__init__()
self.out_feats = out_feats
self.radius = radius
self.linear_prev = nn.Linear(in_feats, out_feats)
self.linear_deg = nn.Linear(in_feats, out_feats)
self.linear_radius = nn.ModuleList(
[nn.Linear(in_feats, out_feats) for i in range(radius)])
self.linear_fuse = nn.Linear(in_feats, out_feats)
self.bn = nn.BatchNorm1d(out_feats)
def forward(self, g, feat_a, feat_b, deg, pm_pd):
# term "prev"
prev_proj = self.linear_prev(feat_a)
# term "deg"
deg_proj = self.linear_deg(deg * feat_a)
# term "radius"
# aggregate 2^j-hop features
hop2j_list = aggregate_radius(self.radius, g, feat_a)
# apply linear transformation
hop2j_list = [linear(x) for linear, x in zip(self.linear_radius, hop2j_list)]
radius_proj = sum(hop2j_list)
# term "fuse"
fuse = self.linear_fuse(th.mm(pm_pd, feat_b))
# sum them together
result = prev_proj + deg_proj + radius_proj + fuse
# skip connection and batch norm
n = self.out_feats // 2
result = th.cat([result[:, :n], F.relu(result[:, n:])], 1)
result = self.bn(result)
return result
Chain-up LGNN abstractions as an LGNN layer
实现:

LGNNCore如示例代码中所示,将两个实例链接在一起,并在前向传递中使用不同的参数。
class LGNNLayer(nn.Module):
def __init__(self, in_feats, out_feats, radius):
super(LGNNLayer, self).__init__()
self.g_layer = LGNNCore(in_feats, out_feats, radius)
self.lg_layer = LGNNCore(in_feats, out_feats, radius)
def forward(self, g, lg, x, lg_x, deg_g, deg_lg, pm_pd):
next_x = self.g_layer(g, x, lg_x, deg_g, pm_pd)
pm_pd_y = th.transpose(pm_pd, 0, 1)
next_lg_x = self.lg_layer(lg, lg_x, x, deg_lg, pm_pd_y)
return next_x, next_lg_x
Chain-up LGNN layers
定义一个具有三个隐藏层的LGNN,如以下示例所示。
class LGNN(nn.Module):
def __init__(self, radius):
super(LGNN, self).__init__()
self.layer1 = LGNNLayer(1, 16, radius) # input is scalar feature
self.layer2 = LGNNLayer(16, 16, radius) # hidden size is 16
self.layer3 = LGNNLayer(16, 16, radius)
self.linear = nn.Linear(16, 2) # predice two classes
def forward(self, g, lg, pm_pd):
# compute the degrees
deg_g = g.in_degrees().float().unsqueeze(1)
deg_lg = lg.in_degrees().float().unsqueeze(1)
# use degree as the input feature
x, lg_x = deg_g, deg_lg
x, lg_x = self.layer1(g, lg, x, lg_x, deg_g, deg_lg, pm_pd)
x, lg_x = self.layer2(g, lg, x, lg_x, deg_g, deg_lg, pm_pd)
x, lg_x = self.layer3(g, lg, x, lg_x, deg_g, deg_lg, pm_pd)
return self.linear(x)
Training and inference
首先加载数据。
from torch.utils.data import DataLoader
training_loader = DataLoader(train_set,
batch_size=1,
collate_fn=train_set.collate_fn,
drop_last=True)
接下来,定义主要的训练循环。请注意,每个训练样本都包含三个对象:A DGLGraph,SciPy稀疏矩阵pmpd和中的标签数组numpy.ndarray。使用以下命令生成折线图:
lg = g.line_graph(backtracking=False)
请注意,backtracking=False正确模拟非回溯操作是必需的。我们还定义了一个实用函数,将SciPy稀疏矩阵转换为火炬稀疏张量。
# Create the model
model = LGNN(radius=3)
# define the optimizer
optimizer = th.optim.Adam(model.parameters(), lr=1e-2)
# A utility function to convert a scipy.coo_matrix to torch.SparseFloat
def sparse2th(mat):
value = mat.data
indices = th.LongTensor([mat.row, mat.col])
tensor = th.sparse.FloatTensor(indices, th.from_numpy(value).float(), mat.shape)
return tensor
# Train for 20 epochs
for i in range(20):
all_loss = []
all_acc = []
for [g, pmpd, label] in training_loader:
# Generate the line graph.
lg = g.line_graph(backtracking=False)
# Create torch tensors
pmpd = sparse2th(pmpd)
label = th.from_numpy(label)
# Forward
z = model(g, lg, pmpd)
# Calculate loss:
# Since there are only two communities, there are only two permutations
# of the community labels.
loss_perm1 = F.cross_entropy(z, label)
loss_perm2 = F.cross_entropy(z, 1 - label)
loss = th.min(loss_perm1, loss_perm2)
# Calculate accuracy:
_, pred = th.max(z, 1)
acc_perm1 = (pred == label).float().mean()
acc_perm2 = (pred == 1 - label).float().mean()
acc = th.max(acc_perm1, acc_perm2)
all_loss.append(loss.item())
all_acc.append(acc.item())
optimizer.zero_grad()
loss.backward()
optimizer.step()
niters = len(all_loss)
print("Epoch %d | loss %.4f | accuracy %.4f" % (i,
sum(all_loss) / niters, sum(all_acc) / niters))
out:
Epoch 0 | loss 0.5751 | accuracy 0.6873
Epoch 1 | loss 0.5025 | accuracy 0.7742
Epoch 2 | loss 0.5078 | accuracy 0.7551
Epoch 3 | loss 0.4895 | accuracy 0.7624
Epoch 4 | loss 0.4682 | accuracy 0.7910
Epoch 5 | loss 0.4461 | accuracy 0.7992
Epoch 6 | loss 0.4815 | accuracy 0.7838
Epoch 7 | loss 0.4542 | accuracy 0.7970
Epoch 8 | loss 0.4338 | accuracy 0.8172
Epoch 9 | loss 0.4694 | accuracy 0.7604
Epoch 10 | loss 0.4525 | accuracy 0.7958
Epoch 11 | loss 0.4388 | accuracy 0.7941
Epoch 12 | loss 0.4440 | accuracy 0.8092
Epoch 13 | loss 0.4325 | accuracy 0.7982
Epoch 14 | loss 0.4087 | accuracy 0.8137
Epoch 15 | loss 0.4073 | accuracy 0.8129
Epoch 16 | loss 0.4123 | accuracy 0.8133
Epoch 17 | loss 0.4061 | accuracy 0.8201
Epoch 18 | loss 0.4100 | accuracy 0.8123
Epoch 19 | loss 0.4170 | accuracy 0.8348
Visualize training progress
您可以在一个培训示例中将网络的社区预测以及基本事实可视化。从以下代码示例开始。
pmpd1 = sparse2th(pmpd1)
LG1 = G1.line_graph(backtracking=False)
z = model(G1, LG1, pmpd1)
_, pred = th.max(z, 1)
visualize(pred, nx_G1)

与地面真相相比。请注意,这两个社区的颜色可能相反,因为该模型用于正确预测分区。
visualize(label1, nx_G1)

这是一个动画,可以更好地理解该过程。(40个迭代)
图片地址:https://i.imgur.com/KDUyE1S.gif
Batching graphs for parallelism
LGNN收集了一系列不同的图形。您可能会考虑批处理是否可以用于并行性。
批处理已进入数据加载器本身。在collate_fnfor PyTorch数据加载器中,使用DGL的batched_graph API对图形进行批处理。DGL通过将它们合并成一个大图来对图进行批处理,每个较小图的邻接矩阵是沿着大图邻接矩阵对角线的一个块。将{math,{Pm,Pd}}连接为块对角线矩阵,对应于DGL批处理图API。
def collate_fn(batch):
graphs, pmpds, labels = zip(*batch)
batched_graphs = dgl.batch(graphs)
batched_pmpds = sp.block_diag(pmpds)
batched_labels = np.concatenate(labels, axis=0)
return batched_graphs, batched_pmpds, batched_labels
您可以在Github上的图神经网络社区检测(CDGNN)上找到完整的代码 。
脚本的总运行时间:(0分钟40.698秒)
下载脚本:6_line_graph.py
下载脚本:6_line_graph.ipynb