【论文阅读】【三维目标检测】PV-RCNN: Point-Voxel Feature Set Abstraction for 3D Object Detection
文章目录
- PV-RCNN
- RPN
- Backbone: 3D Sparse Convolution
- Classification & Regression Head
- Voxel Set Abastraction Module(VSA)
- Discussion
- VSA Module
- PKW Module(Predicted Keypoint Weighting)
- RCNN
- Experiments
- 思考
本论文目前是KITTI排名第一,香港中文大学和商汤出品,该作者还提出了PointRCNN和Part-A 2 ^2 2Net。
PV-RCNN
本文将Grid-based(我一般常称为Voxel-based)的方法和Point-based的方法优缺点结合了起来。本文首先说明了Grid-based和Point-based的方法的优缺点:
“Generally, the grid-based methods are more computationally efficient but the inevitable information loss degrades the fine- grained localization accuracy, while the point-based methods have higher computation cost but could easily achieve larger receptive field by the point set abstraction.”
网络的结构图如下:

RPN
Backbone: 3D Sparse Convolution
在本文中没有介绍太多,但在作者之前的一篇文章“Part-A 2 ^2 2 Net: 3D Part-Aware and Aggregation Neural Network for Object”中介绍的比较详细,由于是backbone,其实也比较通用。那作者为什么要用3D Sparse Convolution呢,作者在文中提到:“Because of its high efficiency and accuracy”
Classification & Regression Head
将3D的feature map转为俯视图,高度变为通道,然后使用每个cell每个类别设置两个anchor,角度分别为0和90度。
实验表明使用这种backbone和anchor的设置方式,Recall高:“As shown in Table 4, the adopted 3D voxel CNN backbone with anchor-based scheme achieves higher recall perfor- mance than the PointNet-based approaches [25, 37]”
但这里有个问题是anchor的角度是0或者90度,那-90度是怎么处理的?这相当于是怎么处理相反方向的车?车辆朝向的这个量这个在Proposal生成的过程中是否考虑?如果考虑,则怎么回归相反方向的车,这种anchor设置看起来不合理;如果不考虑,那么在通过Proposal生成6x6x6的grids的时候的顺序怎么确定,难道就一直不考虑?这个得通过具体Loss或者代码中看了。
这一点,Part-A 2 ^2 2Net也没有细讲,但引文可以追溯到SECOND: Sparsely Embedded Convolutional Detection。这样子其实也可以理解,就相当于在图像处理中,网络要学会对左右翻转的鲁邦性。
Voxel Set Abastraction Module(VSA)
Discussion
有了Proposal,就要提取Proposal中的feature,形成一个固定大小的feature map了,本文将Proposal分成了6x6x6的栅格。那么如何计算6x6x6的每个cell的feature呢?
然后作者提出了对目前方法不足的地方的讨论:
“(i) These feature volumes are generally of low spatial resolution as they are downsampled by up to 8 times, which hinders accurate localization of objects in the input scene.
(ii) Even if one can upsample to obtain feature volumes/maps of larger spatial sizes, they are generally still quite sparse.”
也就是说使用差值的方法,类似于图像中的目标检测那样的RoI Align的方法不太好。
作者就提出了一种思路,使用PointNet++中的SA层,对每个cell,使用SA层,综合这个cell一定范围内的BackBone输出的feature map中的feature。但作者提出,这种方法,计算量太高。
“A naive solution of using the set abstraction operation for pooling the scene feature voxels would be directly aggregating the multi-scale feature volume in a scene to the RoI grids. However, this intuitive strategy simply occupies much memory and is inefficient to be used in practice. For instance, a common scene from the KITTI dataset might result in 18, 000 voxels in the 4×downsampled feature volumes. If one uses 100 box proposal for each scene and each
box proposal has 3 × 3 × 3 grids. The 2, 700 × 18, 000 pairwise distances and feature aggregations cannot be efficiently computed, even after distance thresholding.”
为了解决这个问题,作者提出了VSA Module,来减少要聚集的feature的总数量,也就是上例子中的18000。
VSA Module
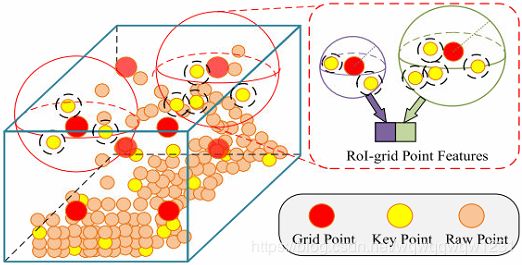
VSA Module在示例图中已经画的非常形象了。过程如下:(公式1,2,3)
1)在原始点钟用Furthest Point Sampling选n个点
2)在每一层中的feature map中,使用SA Module综合每个点一定邻域内的feature
3)然后把所有feature concat起来
Extended VSA Module还多两种feature:
- 在Backbone输出的feature map转到的BEV图中,用2D bilinear interpolation计算的feature
- 使用原始点云通过SA Module计算的feature
PKW Module(Predicted Keypoint Weighting)
问题是n个点中,有些点事前景点,比较重要,有些点是背景点,不重要。这就要区分一下,通过这n个点的feature,可以计算n个weight,weight由真实的mask做监督训练,然后用这weight乘以点的feature,得到每个点的最终的feature。(公式5)这个过程被称为PKW module。

上述过程是使用n个点来表示整个场景,文章中叫做voxel-to-keypoint scene encoding,n个点叫做key-points
到此,我们有了Proposal和n个点的坐标和对应的feature。
RCNN
有了Proposal,就可以生成6x6x6个cell,对于每个cell的中心点,可以在之前得到的n个点中选取那些在其邻域的点,然后使用SA Module综合特征,得到cell的特征。(公式6,7)
得到了Proposal的固定大小的特征,就可以做confidence prediction和box refinement了。这里要注意的是confidence prediction的真实值是由IOU给出的。
Experiments
在KITTI上和Waymo Open Dataset上效果都很好。
Ablation Studies:
- 验证了voxel-to-keypoint scene encoding的有效性,与RPN和朴素的想法做了对比。
- 验证了different features for VSA module。
- 验证了PKW module的有效性。
- 验证了RoI-grid pooling module比RoI-aware pooling module(PointRCNN中的方法)的有效性。
思考
本论文的作者之前的论文还有PointRCNN,Part-A 2 ^2 2Net。本文主要引用STD,这里就做一下对比,看看网络的发展脉络。
PointRCNN完全使用PointNet++做特征提取的module,包括RPN中的backbone和RCNN中的特征提取部分。
STD相比于PointCNN,加入了RoI-grid的部分。由于RCNN中使用voxel表示的,RCNN中的特征提取也变成了3D Convolution。
Part-A 2 ^2 2Net,相比于STD,一开始就是用Voxel的表示方法,将RPN中的主干网络也换成3D Convolution。(当然还有提出了Part location的表示等等)抛开细节的特征表示不谈,我认为其实Part-A 2 ^2 2Net就是本文中朴素的想法。
PV-RCNN解决了本文提出的Part-A 2 ^2 2Net计算效率低的问题。
本文阅读起来非常舒服,就像在讲一个故事,写论文的方法也可以很好的借鉴本文。