Simulink代码生成提高教程
本文转载在我的微信公众号:古德曼汽车工业。

希望关注本专栏的朋友,也能一并关注微信公众号。
原文地址:Simulink代码生成提高教程
前言
前两期文章《Simulink代码生成应用教程》、《Sinmulink代码生成基础体验教程》中思想介绍了如何使用Simulink生成嵌入式代码,以及生成的代码如何移植到嵌入式开发环境。本期文章内容将继续深入,介绍下如何在Simulink中直接对嵌入式芯片配置,做到无需手工编写底层的嵌入式程序。市场上的这类产品一般由快速原型的厂家(如:华海科技、海博瑞德等)提供,需要安装厂家自己的目标系统,本期就来聊聊如何自制一个目标系统。
什么是自定义目标系统
在前面介绍代码生成的时候,第一步就是选择目标【Target Selection】,Matlab已经自带了不少目标系统,例如之前用的ert.tlc。

如果你安装了NIVeriStand、CRUISE或其他快速原型产品,这里就会多出来一些目标系统可以选择。自定义目标系统是为了让Simulink生成的代码能根据用户的需要,与底层驱动做集成
Simulink目标编译流程
制作自定义目标系统前,需要了解Simulink目标编译的流程,该部分内容来自Matlab内部帮助文件《Simulink Coder Target Language Complier》。之前的内容中介绍了如何将Simulink模型生成C代码,下面思想就来围观一下,当我们按下【编译】按钮后Matlab究竟做了哪些事。

-
第一步,Simulink会生成一个rtw文件,这个文件非常重要。它保存了Simulink模型中的所有信息,包含模块,模型配置、S函数等。
-
第二步,使用TLC语言,读取rtw文件中的信息,根据预先编写好的模板重新组织生成的C语言代码。通过这种方式就能获得与嵌入式开发环境兼容的代码。
-
第三步,依托编译器(C/C++),将C代码编译成exe或者dll文件。这一步只会在一些仿真软件中用到,例如NIVeriStand、dSpace、CRUISE。本次内容只涉及到C代码生成,所以这部分内容不过多介绍。
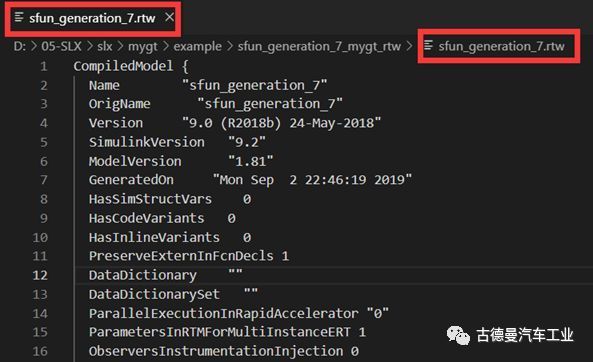
上面是一个rtw文件,该文件会在编译过程中出现在代码生成的文件夹里。Matlab默认情况下这个文件在完成代码生成的时候会自行了断(被删除),如果有小伙伴门对rtw文件结构感兴趣,可以在Simulink模型配置中,把【Retain Rtw】选项勾选,这样完成代码生成动作后,这个文件就不会被删除。
自定义目标系统的文件组成
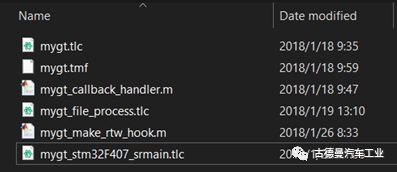
假设我们制作的目标系统名称为mygt,那就会包含如下文件:
-
系统TLC文件【mygt.tlc】
-
主函数TLC文件【mygt_stm32F407_srmain.tlc】
-
用于处理文件的TLC文件【mygt_file_process.tlc】
-
回调函数文件【mygt_callback_handler.m】
-
hook文件【mygt_make_trw_hook.m】
-
编译模板【mygt.tmf】
每一个目标系统除了代码生成模板的设置外还会封装自己的Simulink模块。每个模块都会包含以下文件:

-
编译前的C mex S函数文件【mcu_can_config.c】
-
编译后的S函数文件【mcu_can_config.mexw32】
-
模块的TLC文件【mcu_can_config.tlc】 系统TLC文件
刚刚提到了,生成代码的第一步就是配置目标【Target selection】,所以创建自定义目标的第一步也就是设计一个自己的tlc模板。这个模板可以参考ert.tlc来创建。
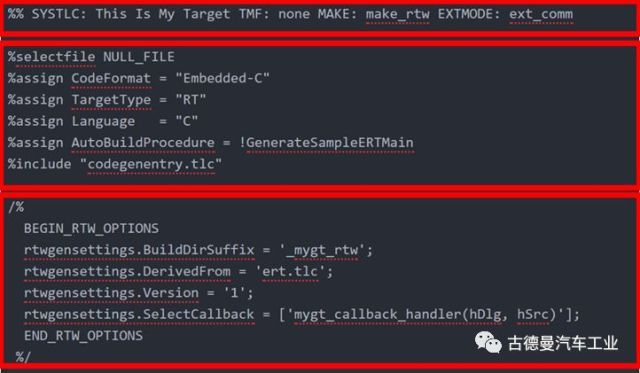
系统TLC文件分为三个部分,顶部定义了自定义目标系统的名称,我们就叫它【This is My Target】。后面是编译选项,由于本次只生成C代码,所以编译模板选择【none】。中部的代码定义了生成代码的类型、语言等,直接照抄ert.tlc。底部定义了代码生成的文件夹命名格式、rtw设置直接引用ert.tlc、设置回调函数等。
回调函数
当我们在Target Selection中选择了系统TLC之后,会调用这个函数,对目标系统的常见配置进行初始化。

例如这三部分分别为:设置ERT生成主函数、设置不进行编译、设置用户代码模板
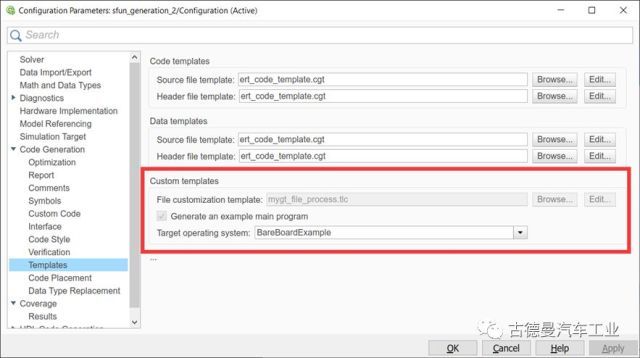
上述回调函数对应到模型的参数配置中就是上图红色部分。当然你可以通过Matlab帮助找到你想设置参数的变量名
用于操作文件的TLC文件
该文件在本例中命名为mygt_ file_process.tlc,通过这个文件来选取使用哪个代码模板。
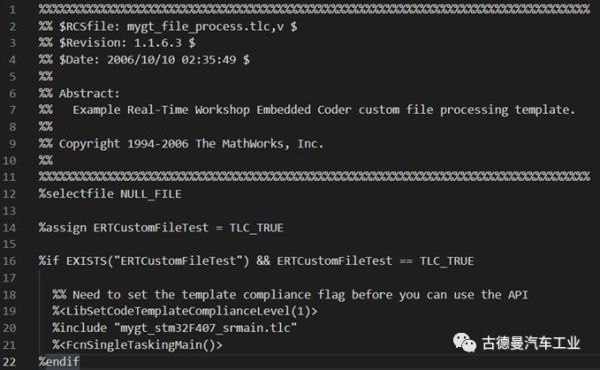
上图可知,本目标系统将调用mygt_stm32F407_srmain.tlc这个代码模板文件,这是一个STM32的Keil工程模板。如果你的项目使用的是CodeWarrior,就需要另外制作一个模板。

打开mygt_stm32F407_srmain.tlc我们可以看到这个文件会把生成的代码组织成一个keil工程的main.c格式。图中包含了需要引用的头文件,函数等等。这里用到很多tlc函数,这些函数具体什么可以去《Simulink Coder Target Language Complier》查找。
Hook文件
顾名思义就是一个钩子函数,它用来将代码生成的各阶段中断出来,插入自己想要加入的操作。
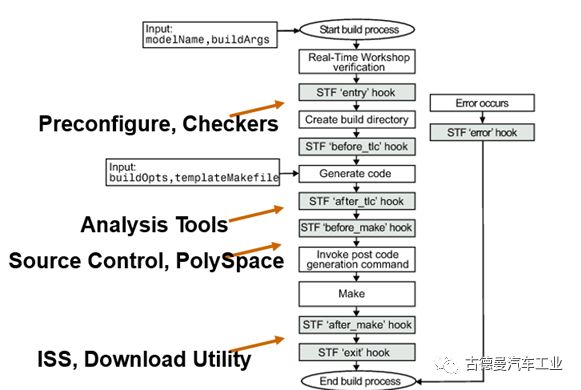
通过流程图,我们可以在每一个步骤进入前【before】、进入时【entry】、完成后【after】进行自定义操作。

这就是一个Hook文件的结构,最常用就是在【exit】的时候,我们把生成的代码与IDE(集成开发环境)做集成。完成代码生成后可以直接用ukeil打开工程,甚至直接烧写单片机。这里调用了make_exit_hook函数。

这内容有点复杂,大致逻辑就是将生成的C文件与H文件复制到keil工程目录下,并把生成C文件、H文件写入工程描述中。
模块文件
上面主要介绍的是自定义目标系统的工作流程、包含哪些文件、具体有什么用。那大部分的自定义目标系统都会封装自己的Simulink模块库,用来对单片机的硬件进行配置

例如:本次使用的例子是基于STM32F407芯片,所以就用S函数封装了一个CAN的初始化函数。对应的S函数名称就是MCU_Can_Config.mwx64。这部分如何创建S函数,调用S函数,Mask参数的设计。这部分在之前的《S-Funciton应用实例》中已经介绍过,这里不重复。

之前介绍S函数时没有介绍mdlRTW这个函数,该函数的功能是把S函数的参数、端口等信息写入RTW文件。后面通过模块的TLC文件来读取写入RTW文件中的相关信息
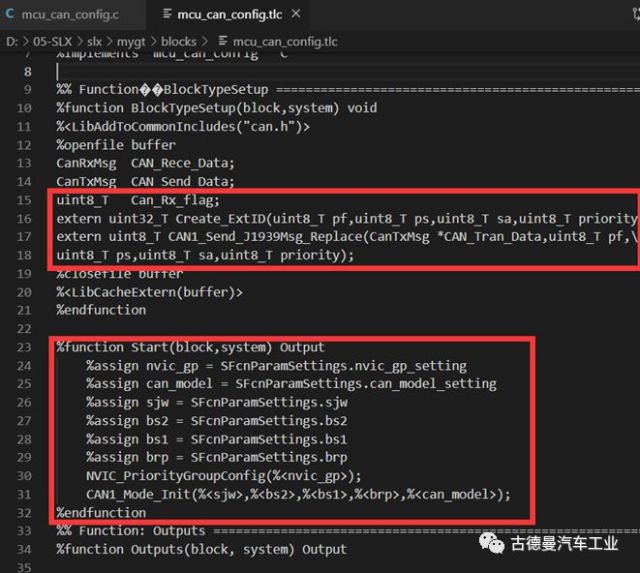
在模块TLC文件中,定义该模块生成代码的格式,包含引用的外部函数,申明变量。另外这里的TLC函数还会到RTW文件中读取配置参数,配合模板生成代码。 大功告成

这是一个利用自定义目标系统开发的应用模型,使用了两个封装模块,分别用来配置CAN总线和接收CAN总线报文。

点击【编译】按钮就会调用keil打开工程或者直接写入单片机
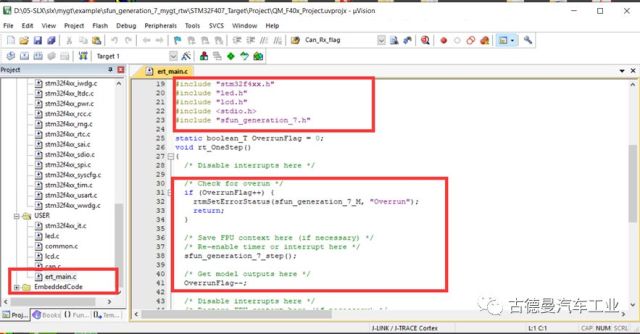
打开keil就能看到集成到开发环境的Simulink代码
最后
Simulink代码生成专题共三篇就此结束,最后这个提高篇涉及的内容比较多,可能很多人看了还不是很明白如何实现的。最后就来总结下一些知识点:S函数、TLC语言、M语言。
【思想】收集到的Matlab培训资料,及一个自定义目标系统的例子。请到公众号原文中获取资料信息。
----------------============推荐阅读=============------------
■ S-Funciton应用实例
■ 汽车工程师眼中的C#
■ 工况路普的采集与数据处理
■ 混合动力节油的秘密-发动机万有特性
■ AVL-CRUISE纯电动仿真策略提高教程
■ AVL-CRUISE纯电动模型仿真策略
■ Simulink代码生成应用教程
■ Sinmulink代码生成基础体验教程
■ 燃料电池车(FCHEV)动力经济性建模与仿真
