基于ROS实现在建图的同时显示本地地图背景的方法
基于ROS实现在建图的同时显示本地地图背景的方法
目录
- 基于ROS实现在建图的同时显示本地地图背景的方法
- 1.安装map_server
- 2.map_server功能包简介
- 3.利用map_server将地图保存在本地
- 4.利用map_server回放本地地图文件
- 5.在rviz上显示回放的地图数据
- 6.在Cartographer建图的同时显示本地地图背景
本文介绍如何通过ros的map_server工具包将创建的地图( nav_msgs/OccupancyGrid格式)保存为本地文件,并通过读取本地文件重新回放在rviz界面上的方法。
1.安装map_server
对于Ubuntu16.04系统,使用如下命令安装:
sudo apt-get install ros-kinetic-map-server
对于Ubuntu18.04系统,使用如下命令安装:
sudo apt-get install ros-melodic-map-server
2.map_server功能包简介
- map_server包提供了一个map_server ROS 节点, 该节点通过ROS 服务器方式提供地图数据。
- 该包还提供了map_saver命令行工具(ROS节点), 使用该工具可将动态创建的地图保存成文件。
关于map_server功能包的详细说明可参考ROS官方文档和相关的中文教程,本文不再赘述,下面重点介绍保存和回放地图的具体方法。
3.利用map_server将地图保存在本地
在得到动态创建的地图之后,可以利用map_server功能包中的map_saver节点将当前地图保存到指定文件名的本地文件中,map_saver节点的命令语法如下:
rosrun map_server map_saver [-f mapname]
rosrun map_server map_saver [--occ <threshold_occupied>] [--free <threshold_free>] [-f <mapname>]
其中,map_saver获取地图数据,并把它写到mapname.pgm和mapname.yaml本地文件中。
- -occ选项(可选)可以指定地图中被判定为障碍物的阈值(0-100)。
- -free选项(可选)可以指定地图中被判定为FreeSpace的阈值(0-100),且threshold_occupied的数值应大于threshold_free的值。
- -f选项(可选)可以指定地图的存放目录和名称。
用法示例:
rosrun map_server map_saver --occ 40 -f lidar_map
即可设置地图的障碍物判定阈值为40,并在当前目录下保存名为lidar_map.pgm和lidar_map.yaml的地图文件。利用系统中的图像查看打开lidar_map.pgm文件,即可直接查看保存的地图结果。
4.利用map_server回放本地地图文件
map_server节点可以从磁盘读取地图文件并使用ROS service提供地图。
目前版本的map_server可将地图中的颜色值转化成三种占用值: 自由 (0), 占用 (100)和未知 (-1)。
map_server节点的命令语法如下:
rosrun map_server map_server mapname.yaml [_frame_id:=frame_id]
其中,mapname.yaml为指定的本地地图文件,_frame_id参数(可选)用于设置发布的地图的坐标系。
用法示例:
rosrun map_server map_server lidar_map.yaml _frame_id:=map_lidar
即可读取本地文件lidar_map.yaml获取地图信息,并发布新的/map话题,可用于地图的显示,同时_frame_id参数指定/map话题中消息的坐标系名称(frame_id)为map_lidar.
5.在rviz上显示回放的地图数据
利用map_server节点回放地图数据后,执行以下两个步骤,即可在rviz显示出保存在本地的地图数据:
- 在rviz的“Displays”窗口点击“ADD”按钮,选择“Map”类型的话题“/map”;
- 将rviz的“Displays”窗口中的选项“Global Options->Frixed Frame”设置为执行map_server节点时指定的“map_laser”。
6.在Cartographer建图的同时显示本地地图背景
由于Cartographer建图时发布的topic名称、map_saver节点订阅的topic名称以及map_server节点发布的topic名称均默认为"/map",因此,要想在Cartographer建图的同时显示本地地图背景,需要在开始动态建图之前对map_server节点发布的Map话题名进行修改,这里可以借助rosbag工具包进行,具体方法如下:
1.使用map_server节点回放地图数据:
rosrun map_server map_server lidar_map.yaml _frame_id:=map_lidar
2.使用rosbag record工具将map数据(topic:/map)记录在rosbag中:
rosbag record /map
由于本地yaml文件只会保存一帧地图数据,因此上述record工具不需要执行太长时间,执行完成后,利用rosbag info工具查看保存的rosbag信息如下所示:
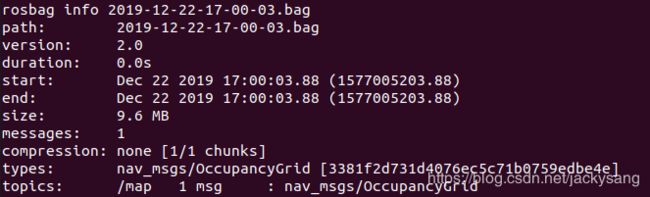
3. 回放记录了地图信息的rosbag
使用rosbag play 命令回放含有地图信息的rosbag,并将原topic名称“/map”修改为其他名称,例如“/map_lidar”,示例如下:
rosbag play 2019-12-22-17-00-03.bag /map:=/map_lidar --loop #/map是原topic,/map_lidar是新topic
其中,–loop选项指定数据包循环回放。
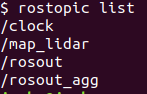
可以通过rostopic list命令看到新增了名为map_lidar的topic:
4.利用cartographer_ros动态建图
具体建图步骤,此处不再赘述,待建图程序开启rviz后,可以参考本文第五节“在rviz上显示回放的地图数据”中介绍的方法,在rviz中添加显示话题为“/map_lidar”的地图数据。
5.添加map_lidar到当前地图坐标系的坐标转换关系
如前所述,话题/map_lidar所处坐标系(frame_id)为"map_lidar",我们可以在ros的launch文件中添加坐标系“map_lidar”到当前地图坐标系(以“map_laser”为例)的转换关系,相应的launch文件内容如下:
<launch>
<node pkg="tf" type="static_transform_publisher" name="corrdinate_map_lidar_background" args="5.0 -2.5 0.0 1.47 0.0 0.0 map_laser map_lidar 1000" />
</launch>
该launch文件调用了ros的tf功能包中的static_transform_publisher节点,用来指定由父坐标系map_laser到子坐标系map_lidar所经过的变换,具体参数信息参考下面的说明:
static_transform_publisher x y z yaw pitch roll frame_id child_frame_id period_in_ms
另外,我们还可以将上述第3步和第5步执行的内容添加到建图程序启动的launch文件开头,即可实现建图程序的一键启动。launch文件中添加的内容如下:
<node
pkg = "rosbag"
type = "play"
name = "play"
args = "$(find cartographer_ros)/bag/2019-12-22-19-05-25_map_lidar.bag /map:=/map_lidar
--loop">
</node>
<include file="$(find cartographer_ros)/launch/tf_shangqi_map_lidar_background.launch" />
添加了地图背景之后的建图程序显示效果如下图所示:
