Opencv实现图像无缝拼接,Sift查找特征点,Flann进行匹配
Sift和Surf算法实现两幅图像拼接的过程是一样的,主要分为4大部分:
1. 特征点提取和描述
2. 特征点配对,找到两幅图像中匹配点的位置
3. 通过配对点,生成变换矩阵,并对图像1应用变换矩阵生成对图像2的映射图像
4. 图像2拼接到映射图像上,完成拼接
具体请转到http://m.blog.csdn.net/article/details?id=52629856
代码如下:
#include "highgui/highgui.hpp"
#include "opencv2/nonfree/nonfree.hpp"
#include "opencv2/legacy/legacy.hpp"
using namespace cv;
//计算原始图像点位在经过矩阵变换后在目标图像上对应位置
Point2f getTransformPoint(const Point2f originalPoint, const Mat &transformMaxtri);
int main(int argc, char *argv[])
{
Mat image01,image02;
if (argc < 2)
{
image01 = imread("left.jpg");
image02 = imread("right.jpg");
}
else
{
image01 = imread(argv[1]);
image02 = imread(argv[2]);
}
if (image01.empty() || image02.empty())
{
return 0;//图像没有全部读取成功
}
imshow("拼接图像1", image01);
imshow("拼接图像2", image02);
double time = getTickCount();
//灰度图转换
Mat image1, image2;
cvtColor(image01, image1, CV_RGB2GRAY);
cvtColor(image02, image2, CV_RGB2GRAY);
//提取特征点
SiftFeatureDetector siftDetector(800); // 海塞矩阵阈值
vector keyPoint1, keyPoint2;
siftDetector.detect(image1, keyPoint1);
siftDetector.detect(image2, keyPoint2);
//特征点描述,为下边的特征点匹配做准备
SiftDescriptorExtractor siftDescriptor;
Mat imageDesc1, imageDesc2;
siftDescriptor.compute(image1, keyPoint1, imageDesc1);
siftDescriptor.compute(image2, keyPoint2, imageDesc2);
//获得匹配特征点,并提取最优配对
FlannBasedMatcher matcher;
vector matchePoints;
matcher.match(imageDesc1, imageDesc2, matchePoints, Mat());
if (matchePoints.size() < 10)
{
return 0;
}
sort(matchePoints.begin(), matchePoints.end()); //特征点排序,opencv按照匹配点准确度排序
//获取排在前N个的最优匹配特征点
vector imagePoints1, imagePoints2;
for (int i = 0; i<10; i++)
{
imagePoints1.push_back(keyPoint1[matchePoints[i].queryIdx].pt);
imagePoints2.push_back(keyPoint2[matchePoints[i].trainIdx].pt);
}
//获取图像1到图像2的投影映射矩阵,尺寸为3*3
Mat homo = findHomography(imagePoints1, imagePoints2, CV_RANSAC);
Mat adjustMat = (Mat_(3, 3) << 1.0, 0, image01.cols, 0, 1.0, 0, 0, 0, 1.0);//向后偏移image01.cols矩阵
Mat adjustHomo = adjustMat*homo;//矩阵相乘,先偏移
//获取最强配对点(就是第一个配对点)在原始图像和矩阵变换后图像上的对应位置,用于图像拼接点的定位
Point2f originalLinkPoint, targetLinkPoint, basedImagePoint;
originalLinkPoint = keyPoint1[matchePoints[0].queryIdx].pt;
targetLinkPoint = getTransformPoint(originalLinkPoint, adjustHomo);
basedImagePoint = keyPoint2[matchePoints[0].trainIdx].pt;
//图像配准
Mat imageTransform;
//将图片1进行映射到图像2,本来映射后x值为负值,但是把映射矩阵向后偏移image01.cols矩阵
//我们很难判断出拼接后图像的大小尺寸,为了尽可能保留原来的像素,我们尽可能的大一些,对于拼接后的图片可以进一步剪切无效或者不规则的边缘
warpPerspective(image01, imageTransform, adjustMat*homo, Size(image02.cols + image01.cols+10, image02.rows));
//在最强匹配点的位置处衔接,最强匹配点左侧是图1,右侧是图2,这样直接替换图像衔接不好,光线有突变
//Mat ROIMat = image02(Rect(Point(basedImagePoint.x, 0), Point(image02.cols, image02.rows)));
//ROIMat.copyTo(Mat(imageTransform1, Rect(targetLinkPoint.x, 0, image02.cols - basedImagePoint.x + 1, image02.rows)));
//在最强匹配点左侧的重叠区域进行累加,是衔接稳定过渡,消除突变
Mat image1Overlap, image2Overlap; //图1和图2的重叠部分
image1Overlap = imageTransform(Rect(Point(targetLinkPoint.x - basedImagePoint.x, 0), Point(targetLinkPoint.x, image02.rows)));
image2Overlap = image02(Rect(0, 0, image1Overlap.cols, image1Overlap.rows));
Mat image1ROICopy = image1Overlap.clone(); //复制一份图1的重叠部分
for (int i = 0; i(i, j)[0] = (1 - weight)*image1ROICopy.at(i, j)[0] + weight*image2Overlap.at(i, j)[0];
image1Overlap.at(i, j)[1] = (1 - weight)*image1ROICopy.at(i, j)[1] + weight*image2Overlap.at(i, j)[1];
image1Overlap.at(i, j)[2] = (1 - weight)*image1ROICopy.at(i, j)[2] + weight*image2Overlap.at(i, j)[2];
}
}
Mat ROIMat = image02(Rect(Point(image1Overlap.cols, 0), Point(image02.cols, image02.rows))); //图2中不重合的部分
ROIMat.copyTo(Mat(imageTransform, Rect(targetLinkPoint.x, 0, ROIMat.cols, image02.rows))); //不重合的部分直接衔接上去
time = getTickCount() - time;
time /= getTickFrequency();
printf("match time=%f\n",time);
namedWindow("拼接结果", 0);
imshow("拼接结果", imageTransform);
imwrite("matchResult.jpg",imageTransform);
waitKey();
return 0;
}
//计算原始图像点位在经过矩阵变换后在目标图像上对应位置
Point2f getTransformPoint(const Point2f originalPoint, const Mat &transformMaxtri)
{
Mat originelP, targetP;
originelP = (Mat_(3, 1) << originalPoint.x, originalPoint.y, 1.0);
targetP = transformMaxtri*originelP;
float x = targetP.at(0, 0) / targetP.at(2, 0);
float y = targetP.at(1, 0) / targetP.at(2, 0);
return Point2f(x, y);
} 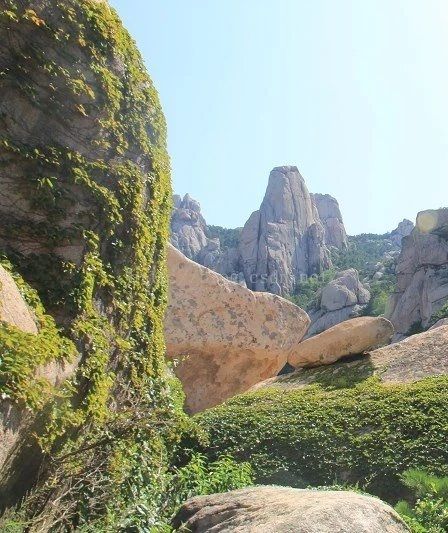
left左边图片
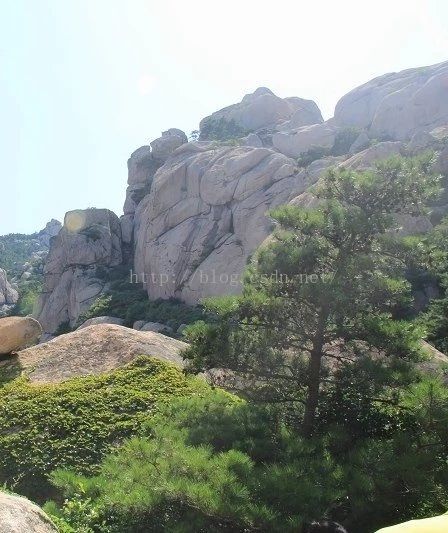
right右边图片
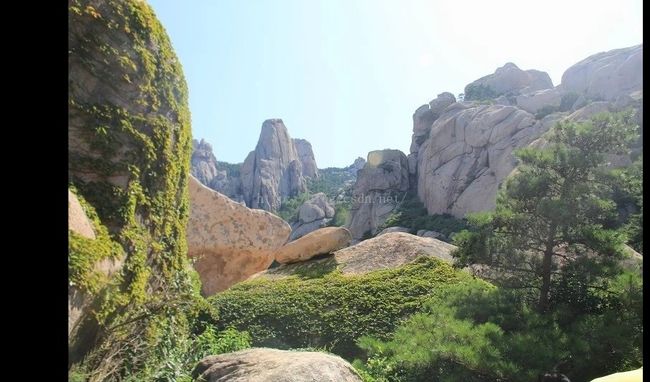
result拼接结果
从测试结果能发现,合并后的图片两边会有黑色区域,如果相机位置不是同高的化,上下两边也会有黑色区域,需要对拼接后的图片进行二次剪切。算法思路是:分别扫描四个边缘,分别找到最大黑色区域长度,然后删掉就行了。