iPhone摄影中的深度捕捉(WWDC2017-Session 507)
视频地址,只能用safari观看
前言
507是深度媒体相关的概念层面的内容。主要为下面4个部分:
- Depth and disparity on iPhone 7 Plus
- Streaming depth data from the camera
- Capturing photos with depth data
- Dual photo capture
Depth and disparity on iPhone 7 Plus

7 Plus 有两个摄像头,28毫米的广角摄像头,56毫米的长焦镜头。它们都是1200万像素,分享同样的配置项、格式。可以单独使用它们,也可以用一个虚拟的第三方摄像头来共同使用它们,使它们配合。它以同步的方式运行,相同的帧速率,并且一起运行它们可以实现两个选框功能。
Dual Camera Zoom 双摄变焦
- Switches between wide and tele automatically
- Matches exposure, focus, and frame rate
Compensates for parallax shift to smooth the transition
在缩放时,会自动切换广角与长焦;
- 适配曝光、对焦和帧速率;
- 对视差偏移进行补偿,使其在广角和长焦之间来回切换时平滑过渡。
Portrait Mode

人像模式锁定在长焦摄像头,但是会同时使用广角和长焦来生成一副浅景深效果的图像。聚焦的前景清晰,背景则会逐渐模糊。

iOS11 上改进了对焦区域的渲染。更准确的展现了一个自由度高的快速镜头,例如上图中清晰明亮的花束圈。还改进了前景和背景边缘的渲染。

为了生成这样效果的图片,就要有能力区分前景和背景,也就是需要depth。在iOS10,depth信息还只是包含在苹果自己相机的人像模式中。iOS11,苹果正在向第三方应用开放depth map。

上面这幅图中内嵌了下面这样一个灰度可视化的深度图:


深度信息有了对图像编辑更多的可能性,例如上图对前景和背景应用不同的滤光器;将黑白滤光器应用到背景,Fade Filter应用到前景。

也可以像上图,将前景的范围缩小到手和花。

还可以对前景和背景应用不同的曝光
Deep Learning
Depth Map
首先定义depth map。真实世界中depth 意思是你和观察物体之间的距离。深度图是将三维场景转化为二维表示,并将深度设置为恒定距离。
下面对针孔相机做一点研究:

针孔相机是一个没有镜头的简单的防光盒,观察物体通过一个孔映射到传感器上。
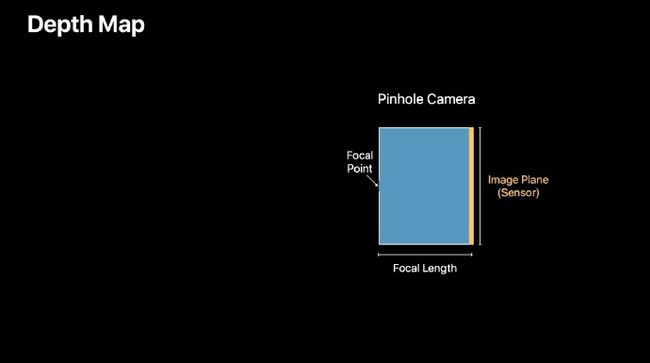
光线通过的孔被称为焦点,聚焦到成像平面的距离就是焦距,物体在成像平面上的缩放程度就取决于焦距。较短的焦距意味着更宽的视野;而更长的焦距,较长的盒子意味着较窄的视野。
简单来说,深度图是将3D深度转换为2D,单通道图像,其中每个像素值是不同的深度,如五米,四米,三米。

为了真正测量深度,需要一个专用的摄像头,比如飞行时间相机。例如,一个系统,它从物体反射光信号,然后测量返回到传感器所需的时间。
iPhone 7双摄像头不是飞行时间相机。相反,它是一个基于Disparity的系统。
Disparity
Disparity 是从两个不同的摄像机(如眼球)观测到的物体的偏移量的量度。Disparity 是视差的另一个名称。


你可以通过稳定头部并将目光固定在靠近的位置上观察此效果,然后不移动您的头部,闭上一只眼睛,然后闭上另一只眼睛。而且你可以看到彩色的铅笔看起来比后面的标记更多,因为它们更接近。这就是 Disparity效果,或者说视差效果。
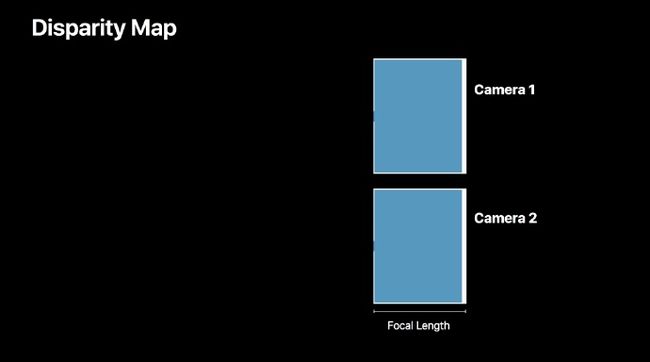
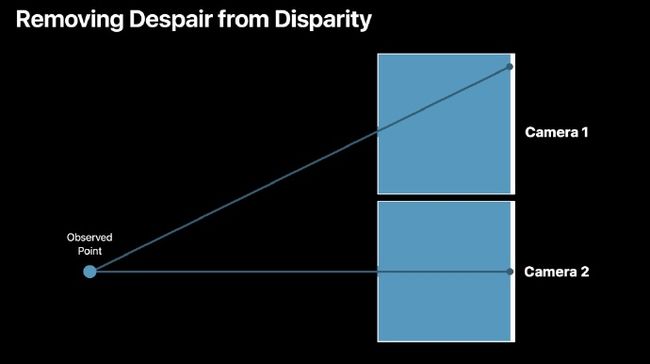
现在我已经拍摄了两台被认为是立体纠正相机的鸟瞰图。意思是说,它们彼此平行,它们指向同一个方向,而且焦距是相同的,这个很重要。

每个相机将具有测量的光学中心或主要点,并且如果从针孔到图像平面绘制垂直线,则光学中心是其与图像平面相交的点。
baseline基线
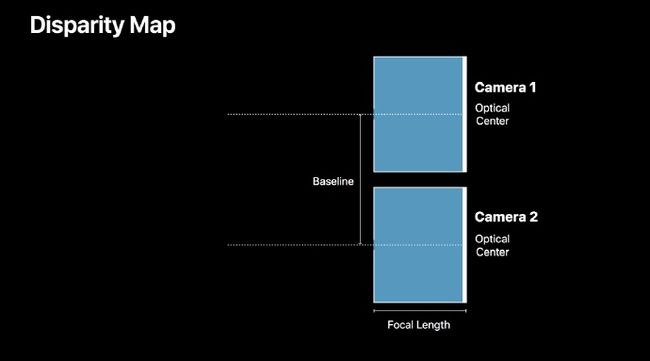
基线是指立体纠正系统中透镜的两个光学中心之间的距离。 下面是它的工作原理:

来自被观察物体的光穿过光学中心,或者说穿过两个照相机的图像平面上的不同点的孔径和平台。
Z
Z是深度或者真实世界深度的规范术语
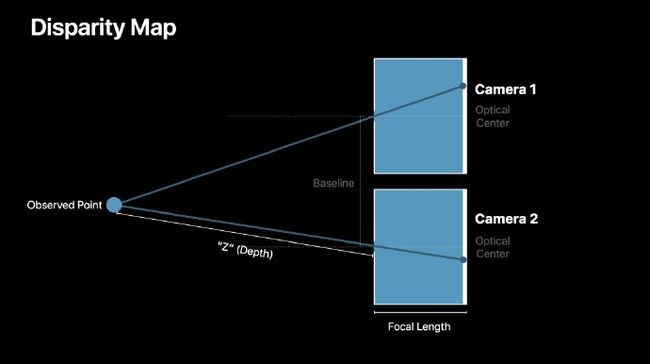
现在看看当观察点越远,图像平面上的点更加接近,同理观察点越近,图像平面上的点间隔越远。
所以当相机是立体纠正时,这些偏移只能在一个方向上移动。他们要么靠近要么远离彼此,要么在同一条线上,要么是对极线。

有了基线,可以沿着它们的光学中心排列相机,并减去图像平面上的观察点之间的距离来获得视差。一般用像素单位来表示。
但是现在对于编辑并不是很方便,如果将图像缩小,实际是改变了像素大小,然后必须在深度图中缩放每个值。
Removing Despair from Disparity
苹果选择使用对缩放操作有弹性的归一化值来表示Disparity。
这里有两个相似三角形,高亮:


现实世界的三角形边是Z,单位是米,而基线是两个光学中心之间的距离。在防光盒内,同一个三角形表示为像素中的焦距和以像素为单位的Disparity。

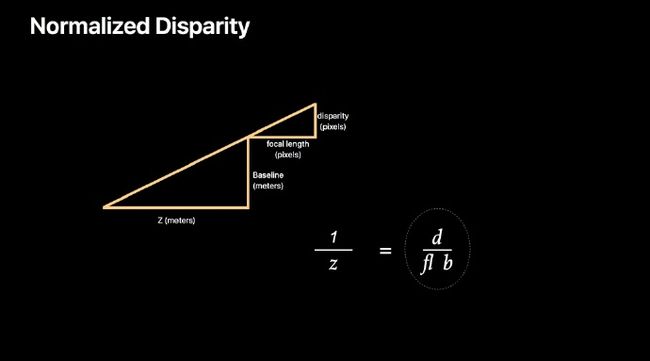
数学表示,并化简得到1 / z。当物体移动得更远时,视差会缩小。基线现在绑定在Disparity中了,当处理深度图时,不需要单独携带该信息。
Disparity单位1/米,它可以承受缩放操作,并且从深度到Disparity的转换很简单,只需要 1除以 这样一个操作。
Disparity vs. Depth
- iPhone 7 Plus双摄像头系统是基于Disparity的
- Disparity是深度的代理
- 归一化Disparity是深度的倒数
New Term: Depth Data
Depth Data是通用术语,对于任何depthy,都可以叫depth data。可以指深度图或者视差图,因为都是深度相关的。
Introducing AVDepthData
- 苹果的平台( iOS, macOS, and tvOS)对于深度的规范表示叫做
AVDepthData。 - 它是AVFoundation框架中的一个类。
- 它代表深度或差异图。
- 它还提供了一些方法,可以在深度和差异之间进行转换。
public var kCVPixelFormatType_DisparityFloat16: OSType { get } /* 'hdis' */
public var kCVPixelFormatType_DisparityFloat32: OSType { get } /* 'hdis' */
public var kCVPixelFormatType_DepthFloat16: OSType { get } /* 'hdep' */
public var kCVPixelFormatType_DepthFloat32: OSType { get } /* 'fdep' */像RGB图像一样,除了是单通道,但它们仍然可以表示为CV像素缓冲区,现在 CoreVideo 定义了在上一张幻灯片中看到类型的四个新像素格式。因为如果是在GPU上,会要求16位的值,而在CPU上,就都是32位的值。
AVDepthData的核心属性:
@available(iOS 11.0, *)
open class AVDepthData: NSObject {
open var depthDataType: OSType { get }
open var depthDataMap: CVPixelBuffer { get }
open var isDepthDataFiltered: Bool { get }
open var depthDataAccuracy: AVDepthDataAccuracy { get }
}Holes
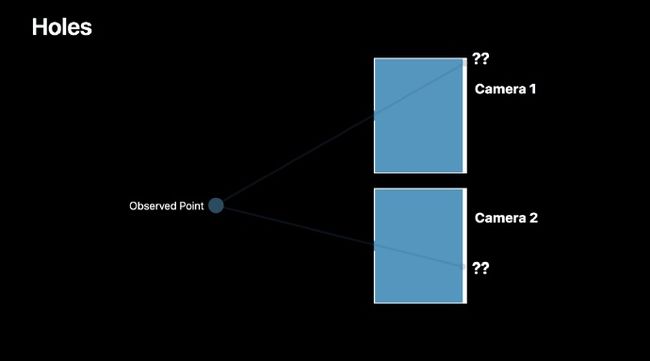
由于光线,或者边缘难以分清等因素,可能会出现无法得到Disparity的点,这种点叫做holes。深度图也可能被处理来填补这些点。 可以通过基于周围深度数据进行内插,或者通过使用RGB图像中存在的元数据来实现。 AVDepthData 的 isDepthDataFiltered 属性告诉是否以这种方式处理了map。
Calibration Errors 校准错误

比如基线计算错误。
iPhone相机不是针孔,iPhone有透镜,并且它的透镜都不是固定的。
- Optical Image Stabilization
- Gravity
- Focus Coil
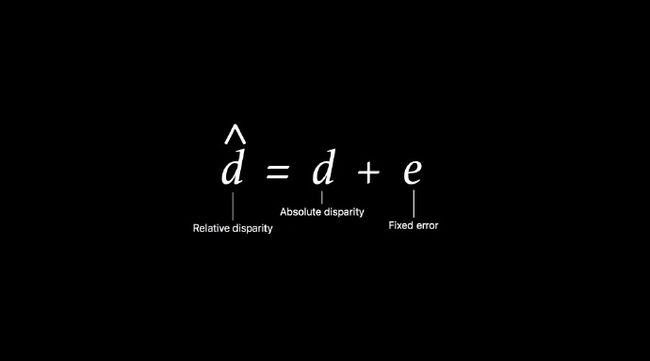
如果使用OIS,则透镜可以横向移动来抵消手抖动。重力可以发挥作用,因为它会导致镜头下垂。聚焦致动器实际上是施加电流的弹簧。所以这些原因可能会导致它横向移动一点,而光学中心位置的这些非常小的误差可能导致Disparity的巨大误差。当发生这种情况时,结果是map中每个像素的误差是一个恒定的。 Disparity 值相对于彼此仍然可用,但它们不再反映真实世界的距离。
Depth Data Accuracy
extension AVDepthData {
public enum Accuracy: Int {
case relative
case absolute
}
}因此 AVDepthData 有一个精度的概念。绝对值的精度值意味着单位确实反映了现实世界的距离,没有校准问题。相对精度意味着Z排序仍然保留,但是现实世界的尺度已经丢失。从第三方摄像机获取的深度数据可以报告为绝对或相对,但由于刚刚提到的校准错误,iPhone 7 Plus总是报告相对精度。
相对精度并不是坏的精度。双摄像头的depth完全可以使用。

Streaming Depth Data
AVCamPhotoFilter
Introducing AVCaptureDepthDataOutput

AVFoundation 框架相机捕获类分为三大部分。第一个是 AVCaptureSession,仅仅是个控制对象。你可以告诉它开始或者停止运行,它不做任何事情,除非给它一个输入,比如 AVCaptureDeviceInput ,这里与双摄像头的设备关联,并且给session提供输入。然后需要一个输出,这里是一个新的输出类型 AVCaptureDepthDataOutput,它的功能类似于 VideoDataOutput,除了提供 CoreMedia 示例缓冲区之外,它提供了 AVDepthData 对象。
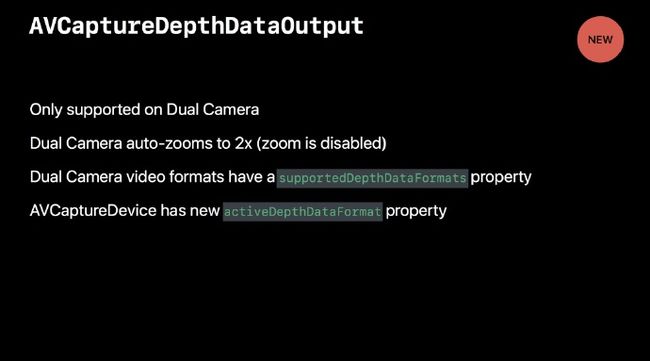
- 只有双摄像头才能支持
AVCaptureDepthDataOutput。 - 将
DepthDataOutput附加到会话中时,双摄像机自动缩放到2倍,即长焦的全部视野,这是因为为了计算视差,焦距必须相同,而在2倍变焦下,广角摄像机的焦距与长焦相匹配。在计算深度时缩放是被禁用的。 - 苹果已经向
AVCaptureDevice添加了一些新的访问器。在双摄像头上,您可以通过查询supportedDepthDataFormats属性来发现哪些视频格式支持深度。 - 还有一个新的
activeDepthDataFormat属性,可以让您看到activeDepthDataFormat是什么或选择一个新的 DepthDataFormat。
Supported Depth Resolutions for Streaming
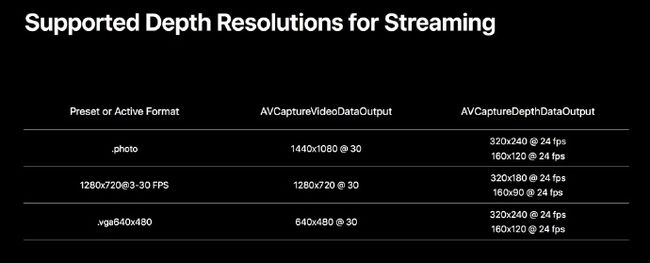
第一个是受欢迎的照片预设。 在照片预设中,可以从 VideoDataOutput 中获得屏幕尺寸的预览,还可以从photoOutput中获得1200万像素的完整图像。所以在这里 VideoDataOutput提供了1440x1080,这是屏幕尺寸。如果使用DepthDataOutput,可以获得24 fps,最大320x240的depthData。这么小的原因是每秒处理24次视差图已经消耗很多性能了。也可以以较低的分辨率得到它,160x120。
第二个是16x9的格式,这是今年的新格式。去年有一个720p 16x9的格式,帧率高达60 fps。今年这个新格式只有30 fps,但是支持depth。同样支持两种分辨率。
最后,有一个非常小的VGA大小的预设或活动格式,如果只是想要非常小非常快,可以使用它。
Depth Frame Rate Examples

AVCaptureDevice允许设置最小和最大视频帧速率,但不允许独立于视频帧速率设置深度帧速率。因为深度需要和视频帧率一致,或者小于视频帧率。例如,如果选择最大视频帧率为24,深度可以跟上这一点,所以得到24 fps的深度。但是,如果选择30 fps视频,则深度跟不上,不过不会选择24,而是15,倍数是比较好的选择。
DepthDataOutput支持过滤深度数据。这样就可以填满空洞,并且随着你的移动也可以比较平滑,这样就不会看到从帧到帧的时间跳跃。
open var isFilteringEnabled: Bool非同步数据输出
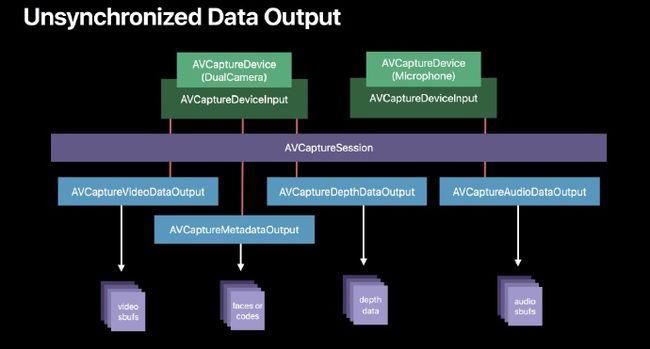
现在有四种数据输出:
第一个是 VideoDataOutput ,从iOS 4开始,它是以30 fps或60 fps的流媒体方式一次给出视频帧。 还有一个 AudioDataOutput,通常会以44.1的速度一次推送1024个PCM帧。 还有一个 MetadataOutput 可以提供面部,检测到的面孔或条形码,并且这些都偶尔出现。 他们可能会有一些延迟,寻找面孔多达四帧延迟。
第四个就是 DepthDataOutput ,是以视频的帧速率或以视频均匀分割的速率传送。
如果关心同时处理所有这些数据,或者处理一定的演示时间。为了处理所有这些数据输出,您必须拥有一个非常复杂的缓冲机制,以便跟踪所有进入的时间,
Synchronized Data Output
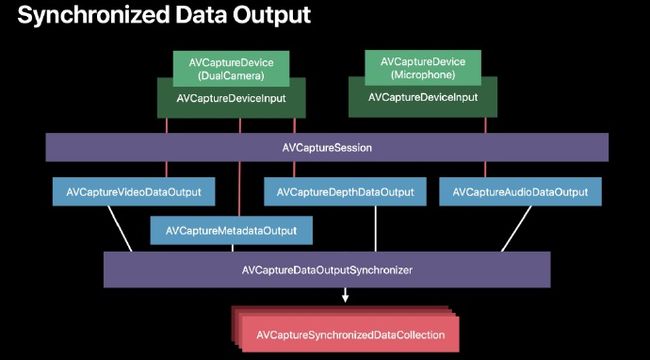
在iOS 11中,苹果添加了一个名为 AVCaptureDataOutputSynchronizer 的新同步对象。它可以在单个统一回调中为给定呈现时间,提供所有可用数据,并传递一个称为AVCaptureSynchronizedDataCollection 的集合对象。
所以这样就可以指定一个主输出,一个最重要的输出,一个希望所有其他东西要同步的输出,然后只要它需要,就可以做这个工作, 以确保给定演示时间的所有数据在可用之前提供给单独的统一回调。它将为你提供输出的所有数据,或者如果确保没有特定输出的数据,它将继续提供与它有关的集合。
下面一个代码示例:
func dataOutputSynchronizer(_ synchronizer: AVCaptureDataOutputSynchronizer, didOutput synchronizedDataCollection: AVCaptureSynchronizedDataCollection) {
// Iterate through an AVCaptureSynchronizedDataCollection using fast enumeration
for syncedData in synchronizedDataCollection {
if let syncedDepthData = syncedData as? AVCaptureSynchronizedDepthData {
// ...
}
}
}可以像数组一样使用它,也可以像字典那样使用它,具体取决于要做什么。
func dataOutputSynchronizer(_ synchronizer: AVCaptureDataOutputSynchronizer, didOutput synchronizedDataCollection: AVCaptureSynchronizedDataCollection) {
// Use dictionary-esque subscripting to find a particular data
if let synDepth = synchronizedDataCollection[self.ddo] as? AVCaptureSynchronizedDepthData {
// ...
}
}Streaming Camera Intrinsics
iOS 11中还有一个新的流式传输功能,当使用 VideoDataOutput 时,支持每个视频帧的相机内在功能。

上面讲到针孔相机,为了将3D空间中的点转换为2D空间,需要两个信息,光学中心和焦距。在计算机视觉中,可以使用这些属性通过使用逆变换将2D图像重新投影回3D空间,这在新的AR kit中是重点。
iOS 11中的新功能,可以选择在每个视频帧中收到这样一组内在函数,通过调用 AVCaptureConnection 的 isCameraIntrinsicMatrixDeliveryEnabled 来选择。
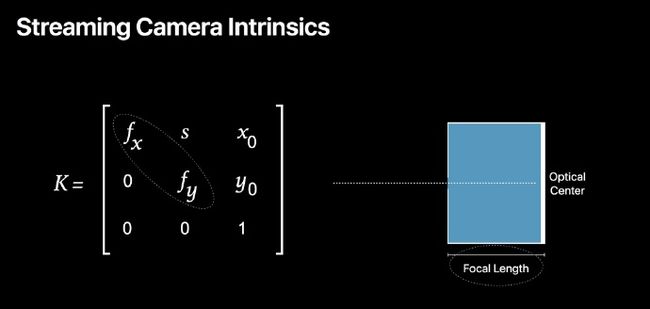
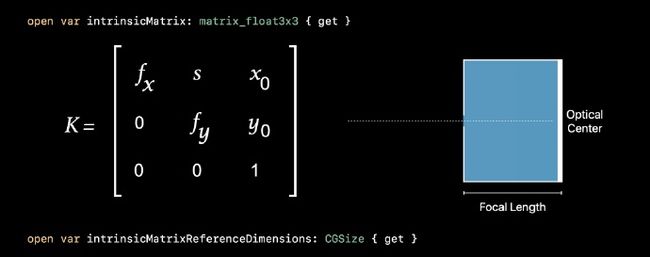
相机内在函数是描述相机几何属性的3x3矩阵。fx和fy是像素焦距。它们是分开的x值和y值,因为有时相机具有变形镜头或变形像素。
在iOS设备上,我们的相机总是具有一致的像素,所以fx和fy总是相同的值。

x0和y0是透镜光学中心的像素坐标。
这些都是像素值,它们是以提供它们的视频缓冲区的分辨率给出的。

所以,一旦你选择了,可以期望以流式方式获取样本缓冲区,可以获得这个附件,有效载荷是一个C/F数据,它包装一个矩阵3x3浮点数,这是一个SIMD数据类型。
Capturing Photos with Depth

AVCam是显示如何使用 AVFoundation 拍摄照片和电影的示范代码。

注意,虽然已经添加了深入支持,但是你看不到任何depth相关的东西。因为当能够拍摄这些铅笔时,实际上并没有看到深度的表现,而是存储在照片中。
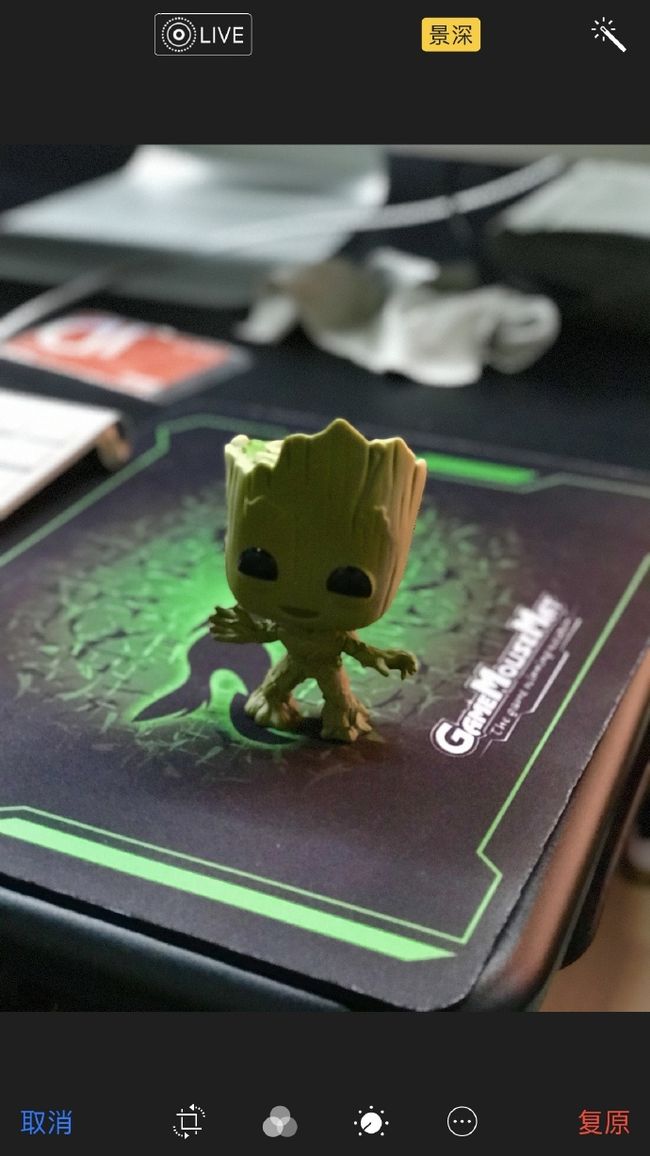
照相结束后,打开相册后编辑,上面有了景深的按钮,可以对景深做效果处理。在iOS 11中,以人像模式拍摄的所有照片现在都会在照片中存储深度信息,因此它们会为您的新创意应用程序添加素材。
Photos with Depth
当拍摄深度照片时,支持很多的捕获选项。
可以使用深度进行闪光拍摄,可以静态图像稳定带深度信息。 甚至可以自动曝光括号,例如加2,减2 EV。 可以使Live Photos带有深度信息。
Capturing Photos with Depth

AVCapturePhotoOutput,这是去年推出的一个类,它是 AVCaptureStillImageOutput 的继承者。它处理复杂的照片请求非常出色。
编程模型是填写一个称为 AVCapturePhotoSettings 的请求,通过传递请求和稍后再调用的代理来启动照片捕获。而且photoOutput是捕获实时照片,裸RAW图像和Apple P3宽色图像的唯一界面。此外,在iOS 11中,它是捕获HEIF文件格式的唯一方法。AVCapturePhotoOutput 需要进行许多更改以支持HEIF,因此在iOS 11中,为了适应这些许多变化,添加了新的委托回调。
一个简单示例:
func photoOutput(_ output: AVCapturePhotoOutput, didFinishProcessingPhoto photo: AVCapturePhoto
, error: Error?)这是替代将获得示例缓冲区的回调。现在得到一个名为 AVCapturePhoto 的新对象。AVCapturePhoto 是深度唯一的传递媒介,所以如果想要深度,需要通过实现这个新的代理回调来操作。
Requesting Depth with Photos
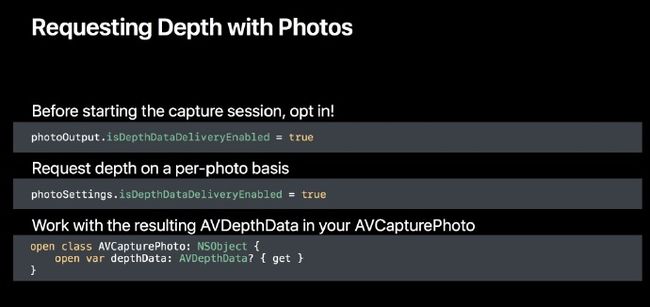
此外,在开始会话之前需要明确地选择 DepthDataDelivery。它需要放大到2倍,使焦距匹配,并且需要锁定自己,禁止缩放。
开始运行会话之前,告诉photoOutput我想要 DepthDataDeliveryEnabled(photoOutput.isDepthDataDeliveryEnabled),然后在每个照片请求的基础上,这里是当你实际拍摄照片,你会填写一个设置对象,并且再一次我想在这张照片中深度(photoSettings.isDepthDataDeliveryEnabled)。
然后,可以使用产生的AVCapturePhoto,它具有一个名为 AVDepthData 的访问器。
High Res Photo Depth Maps

在iOS上,大多数AVCaptureDevice格式都具有比流式分辨率更高的静态图像分辨率。depth也是同理。
如果是流式深度,用实时的方式来满足24 fps,有很多工作需要做,但是如果是照片,有一点额外的时间,因为它不需要实时发送,所以可以达到非常高品质的map,超过流分辨率的两倍。
长宽比与视频的长宽比一致。
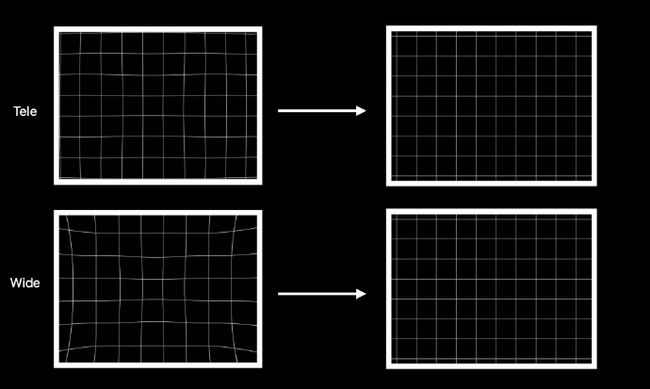
Rectilinear vs. Lens Distorted Images
捕获和嵌入照片的深度图都是畸变的。
之前展示的所有相机图是针孔相机。 针孔相机没有镜头,因此图像是直线的; 也就是说,光以直线穿过小孔,并在图像平面上呈现几何完美的复制倒置物体。

如果有一个这样的完美的正方形网格,并用针孔相机拍摄它,它将在图像平面上看起来像这样,但是颠倒的。直线会保持直线。
但是在现实世界中,需要让更多的光线进入,所以需要镜头,镜头有径向变形。这些失真也存在于捕获的图像中,因为它们以稍微奇怪的方式弯曲成图像传感器。
在极端情况下,通过不良镜头捕获的直线可能看起来像这样:

在比较广角和长焦图像之前,必须做一个额外的步骤:
必须使那些扭曲的图像直线化; 也就是说,使用校准的系数集合来解决它们,并且这些系数表征了镜头的失真。
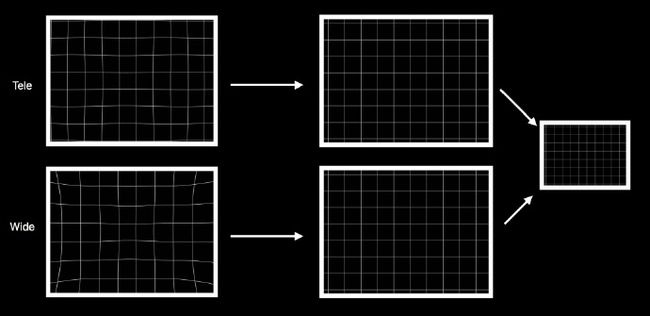
Depth Map Distortions
现在可以确定地比较两个图像中的点,并找到一个完美的,真实的,直线的视差图,看起来像这样:
差距图匹配物理世界,但它与刚刚拍摄的图像不符,因为镜头有扭曲,所以现在必须做另一个步骤,就是将视差图重新映射回图像,使用一组逆透镜系数来做到这一点,最后的视差图具有与其伴随图像相同的几何失真。
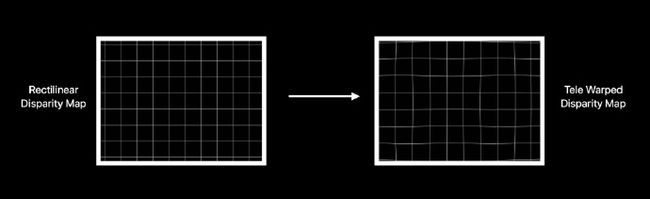
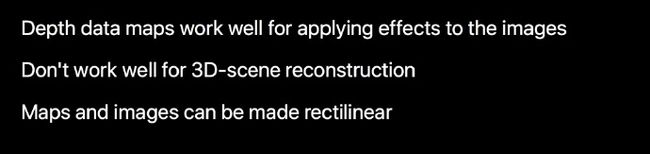
这意味着开箱即用的depthDataMaps附带的照片适用于过滤器,适用于效果。不完美的是重建3D场景。 如果想这样做,应该使它们是直线的:
Depth in Image Files
简单地介绍图像文件中的深度数据的物理结构。

iOS 11苹果有两种图像支持深度。第一个是HEIF HEVC,新格式,也称为HEIC文件,对深度的支持是最好的。文件内有一个称为辅助图像的区域,可以存储视差或深度或透明度map,这就是存储的地方。
我们将其编码为单色HEVC,还存储对于深度工作非常重要的元数据,例如有关滤光器的信息,精度,相机校准信息(如镜头失真)以及一些渲染指令。所有这些都与辅助图像一起编码为XMP。

第二个就是JPEG,虽然这并不是很好的方法,但还是支持了。map是8位有损JPEG,如果它被过滤,或者如果它没有一个数字,使用16位无损JPEG编码来保存所有非数字,苹果将它作为第二个图像存储在JPEG的底部,如果你熟悉的话,它就像一个多画面对象。同样编码是XMP。
Dual Photo Capture
对于双摄像机最需要的开发者功能,双重照片捕获。
到目前为止,当使用双相机拍照时,仍然只能获得一张图像。 它是来自广角还是来自长焦,取决于缩放的位置,或者如果在1和2X之间的区域,可能会获得两者的一部分,因为苹果进行了一些混合,使得到更好的图片,但仍然只有一个。
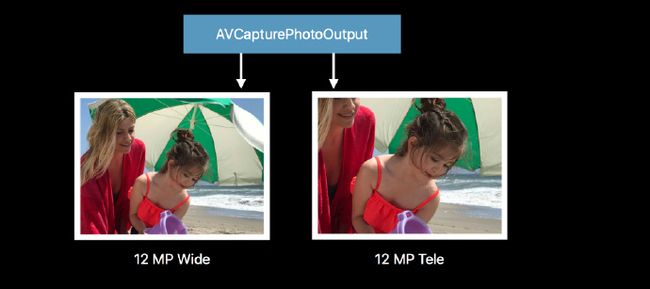
现在,苹果两张图片都给了:通过单一请求,可以获得广角和长焦的全部1200万像素的照片。
Requesting Dual Photo Delivery
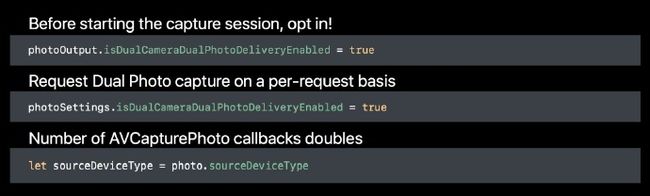
与上述的深度操作非常相似。设置两个属性 photoOutput.isDualCameraDualPhotoDeliveryEnabled , photoSettings.isDualCameraDualPhotoDeliveryEnabled 为ture。照片的回调就会给两份。
假设你要求RAW 和 HEIF双照。 那么会得到4份,因为将得到两个广角和两个长焦的RAW和HEIF。
Dual Photo Capture

现在,我们支持与深度相关的所有功能,可以使用双摄照片,自动SIS,曝光等级,可以根据需要选择深度。
Dual Photo Capture + Zoom

假设你的应用程序只显示长焦的视野。 那么广角摄像机有更多的信息,所以如果你拍照,实际上给人的可见区域以外的东西,这可能是一个隐私的关注。所以如果是缩放,苹果提供双重照片,但外部变黑,使它们与预览中看到的视野相匹配。
如果您想要完整的图像,可以不要设置缩放。
怎么知道外面是否有黑色区域?在图像内部,存储一个纯净的孔径矩形,它定义了有效像素的区域。

也可以使用相机校准数据传送双重照片。相机校准数据是进行增强现实,虚拟现实,镜头失真校正等需要的数据。 因此,无论是广角的还是长焦和相机校准数据,都可以制作自己的深度图。
Introducing AVCameraCalibrationData
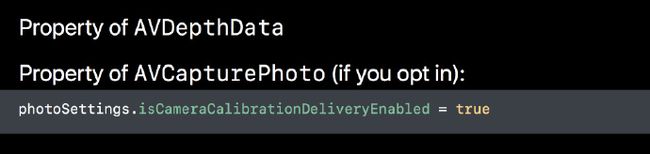
相机校准的属性。AVCameraCalibrationData 是相机校准的model类。如果要求深度,可以得到一个 AVDepthData。 这就是 AVDepthData 的属性。 如果从AVCapturePhoto中选择了此功能,也可以获得该功能。 所以选择加入这个照片来说,我想用相机进行相机校准,这个照片效果很好。
如果正在进行双重照片拍摄,需要双面照片,并要求相机校准,将获得两张照片回调,并且可以获得具有广角效果的广角校准,和具有长焦效果的长焦校准。
intrinsicMatrix
和之前的streaming VideoDataOutput情况很相似。但是仅仅是这样深度数据的分辨率可能非常低,所以苹果又提供了一套单独的维度。通常,它们是传感器的完整尺寸,因此,您以获得很多精度,在 intrinsicMatrix 中有很高的分辨率。
extrinsicMatrix

extrinsicMatrix:这是描述相机在真实世界中姿势的属性。当使用从立体矫正摄像机得到的图像进行三角测量时,需要将其与另一个相比较。而外在特征被表现为一个单一的矩阵,但是两种矩阵被挤压在一起。
左边是旋转矩阵。这是一个3x3,它描述了相机相对于真实世界如何旋转。
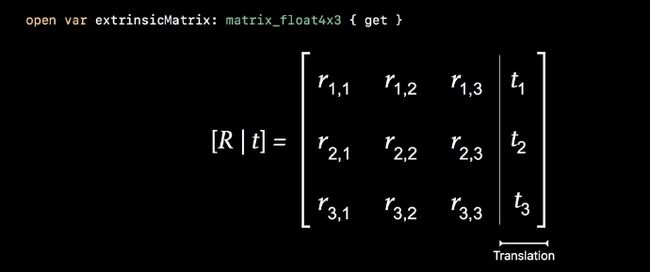
还有一个1x3矩阵,描述了相机的翻转,或与世界边缘的距离。注意,当使用双摄像头时,长焦摄像机是世界的边缘,这使得它非常容易。
如果只是得到一个长焦图像,你得到的矩阵将是一个单位矩阵。 如果正在使用广角和长焦,广角将不是单位矩阵,因为它描述了与长焦镜头的姿态和距离。 但是,使用extrinsics,可以计算广角与长焦之间的基线。
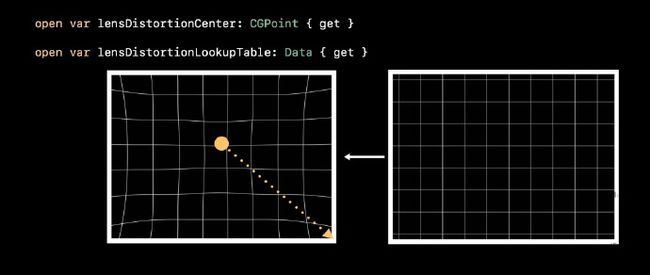
这里有两个属性需要注意。一个是 lensDistortionCenter。这描述了传感器上与镜头失真中心重合的点。这通常与镜头的光学中心不同。
就像上图的扭曲,透镜上的径向扭曲像树环一样,这将是树环的中心。
同时还有一个属性是lensDistortionLookupTable,可以将其视为将 lensDistortionCenter 连接到最长半径的多个浮点数。lensDistortionLookupTable 是包含在数据中的C浮点数组。如果沿着这些虚线的每个点都是0,那么就拥有了世界上唯一一个完美的镜头,因为这就根本没有径向畸变了。
如果是正值,则表示半径有延长。如果是负值,则表示有压缩。
将整个表格整合在一起,就可以了解镜头的颠簸情况。
要对图像应用失真校正,需要以一个空目标缓冲区开始,然后逐行迭代,并且对于每个点,都使用 lensDistortionLookupTable 在失真的图像中找到相应的值,然后将该值写入到输出缓冲区中的正确位置。
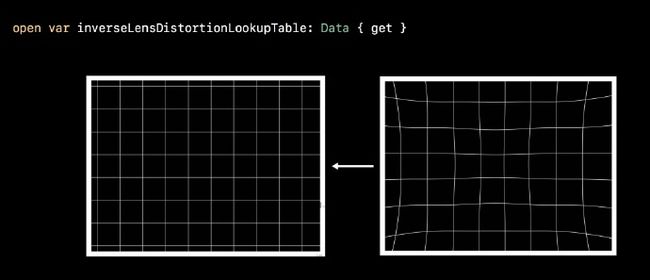
这个是比较难实现的代码,苹果在 AVCameraCalibrationData.h 中提供了一个参考实现。实际是把代码放到了头文件里面。全都有注释。是个很大的objective C函数。它描述了如何纠正图像或如何反扭曲图像,具体取决于传给它的表格。还有一个表格的逆,它描述了如何从扭曲回到非扭曲。
Summary

- iPhone 7 Plus双摄像头不是飞行时间相机系统,是Disparity系统。
- 此外,苹果平台上对深度的规范表示是
AVDepthData。 - 了解了intrinsics、extrinsics、lens distortion的信息。都是
AVCameraCalibrationData的属性。 - 了解了
AVCaptureDepthDataOutput,它提供了可以过滤的流式深度。 - 可以使用
AVCapturePhotoOutput捕获带有深度信息的照片。 - 最后讲到了双摄像头,双照片,对于某些计算机视觉可以单独用到广角和长焦的照片。