一、简介
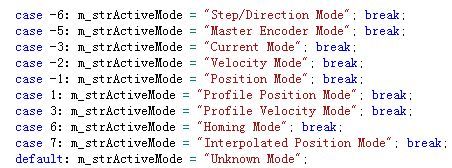
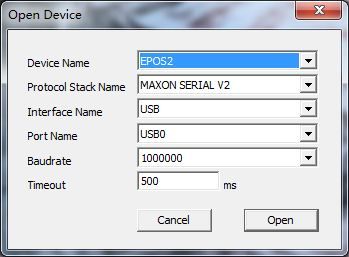
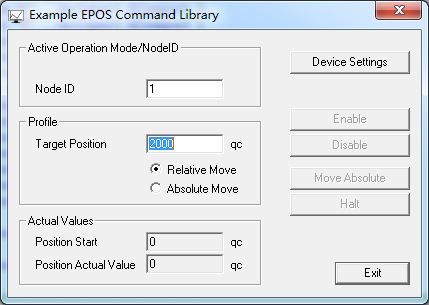
EPOS给的这个VC代码是用MFC编写的上位机,由图1可知EPOS控制器最多可以设置九种控制方式,而这个上位机默认只能使用“Profile Position Mode”,电机参数配置界面和驱动界面分别如图2图3所示。注意选择EPOS2控制器,连接方式一般都是默认串口发送。
二、控制思路
1、配置完控制器参数后进入图3控制界面,在对话框初始化函数BOOL CDemo_WinDLLDlg::OnInitDialog()中调用OpenDevice()函数判断控制器与电机是否成功打开,若打开则开启定时器,以100ms的周期更新数据并改变界面显示。其中OpenDevice()函数核心代码如下图所示。
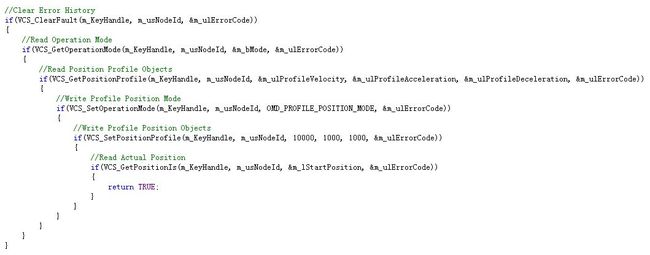
下面简要介绍图4中主要的几个函数,详细介绍请见EPOS2-24-2文件夹下《EPOS Command Library》的PDF文件。
VCS_ClearFault(m_KeyHandle, m_usNodeId, &m_ulErrorCode):清除错误状态,使电机由错误状态转到关闭状态。
VCS_GetOperationMode(m_KeyHandle, m_usNodeId, &m_bMode, &m_ulErrorCode):读取电机驱动状态,变量m_bMode返回驱动方式编号。
VCS_GetPositionProfile(m_KeyHandle, m_usNodeId, &m_ulProfileVelocity, &m_ulProfileAcceleration, &m_ulProfileDeceleration, &m_ulErrorCode):读取位置驱动方式的各项参数,m_ulProfileVelocity返回稳定时转速,m_ulProfileAcceleration和m_ulProfileDeceleration分别返回电机加速和减速时的加速度。
VCS_SetOperationMode(m_KeyHandle, m_usNodeId, OMD_PROFILE_POSITION_MODE, &m_ulErrorCode):将电机驱动方式通过OMD_PROFILE_POSITION_MODE配置成Profile Position Mode。
VCS_SetPositionProfile(m_KeyHandle, m_usNodeId, 10000, 1000, 1000, &m_ulErrorCode):配置电机在Profile Position Mode方式驱动下的各项参数,10000表示电机稳定时的转速,两个1000形参表示电机加速和减速时的加速度。
VCS_GetPositionIs(m_KeyHandle, m_usNodeId, &m_lStartPosition, &m_ulErrorCode):获取电机此时的各项位置参数,m_lStartPosition返回函数被调用时电机实际位置,即为初始位置。
2、在图3界面配置控制器节点ID和目标位置信息,通过m_lTargetPosition变量获取设定的目标位置信息,并且选择是相对转动方式还是绝对转动方式,若为前者则电机会转动目标位置距离,否则则是电机转动到设定的绝对位置处为止。
3、点击ENABLE按钮,使能电机,注意此时并没有开始驱动电机。主要采用的核心代码如图5所示
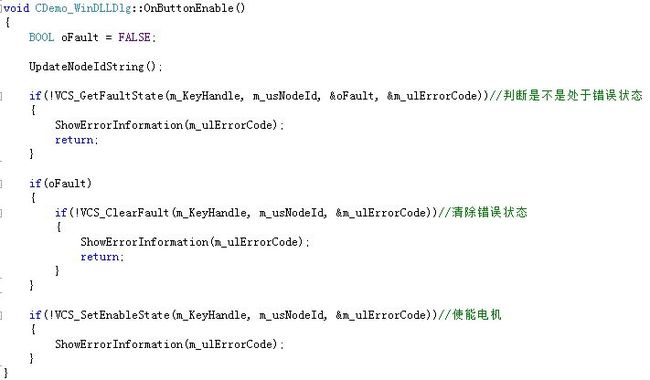
简要介绍相关函数:
UpdateNodeIdString():将节点ID编辑框中的数值转换成字符串类型,即更新参数m_usNodeId。
VCS_GetFaultState(m_KeyHandle, m_usNodeId, &oFault, &m_ulErrorCode):判断电机是否处于错误状态,是则oFault=true,判断失败则函数返回0。
VCS_ClearFault(m_KeyHandle, m_usNodeId, &m_ulErrorCode):清除存在的错误,使电机从错误状态变成失能状态。
4、点击MOVE按钮,实现电机转动,驱动代码如图6所示。
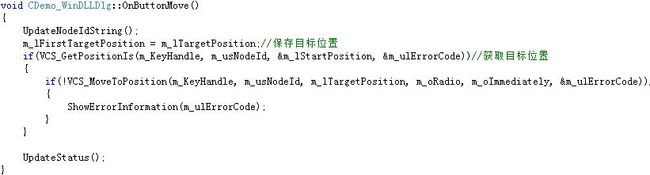
简要介绍相关代码:
m_lFirstTargetPosition用来存储初次设置的目标位置(比如9722000表示90圈)。
VCS_GetPositionIs(m_KeyHandle, m_usNodeId, &m_lStartPosition, &m_ulErrorCode):获取此时位置信息,通过m_lStartPosition返回显示在初始位置编辑框。
VCS_MoveToPosition(m_KeyHandle, m_usNodeId, m_lTargetPosition, m_oRadio, m_oImmediately, &m_ulErrorCode):驱动电机转动到响应位置,m_oRadio表示相对转动还是绝对转动,m_oImmediately为true表示立即驱动,若为false则表示等上次驱动到指定位置,才开始本次驱动。
UpdateStatus():更新对话框显示。
5、点击HALT按钮,使电机处于暂停状态,按照设定的减速时加速度值减速到0,。停止后点击MOVE按钮电机会重新转动到目标位置为止。
只调用一个函数VCS_HaltPositionMovement(m_KeyHandle, m_usNodeId, &m_ulErrorCode)。
6、点击DISABLE按钮,使电机处于停止状态,电机立刻停止而不是匀减速停止,并且停止后再点击MOVE按钮并不会继续转动。
核心函数只有一个:VCS_SetDisableState(m_KeyHandle, m_usNodeId, &m_ulErrorCode)。
7、定时器中电机正反向驱动切换的实现,实现代码如图7所示。(本部分代码不属于官方范例,自己修改)

代码解析:
调用VCS_GetPositionIs()函数使m_lActualValue始终获得实时电机位置信息。
通过先前m_lFirstTargetPosition变量存储了初次设定的非0目标位置值,通过判断语句使目标位置m_lTargetPosition在非0值和0之间切换,实现自动正反向切换。