Ubuntu 16.04 LTS安装配置ROS机器人操作系统之Kinetic版本
Ubuntu 16.04 LTS安装配置ROS机器人操作系统之Kinetic版本
- 准备
- 配置
- 安装ROS kinetic
- 初始化ROSDEP
- 环境配置
- package依赖(安装rosinstall)
- ROS Kinetic测试
- ROS到位
- 乌龟到位
- 乌龟run起来
准备
本文ROS采用直接终端apt-get方式进行安装,前提是根据自己Linux系统(Ubuntu/Debian)的具体版本下载相应的ROS版本(具体表现为各种不同的乌龟们)进行安装。
base底板系统——Ubuntu 16.04 LTS (Linux)
ROS系统选择——对不起,没得选择,你只能接受并享受。因为目前Ubuntu16.04只能安装ros的kinetic版本。
Before Installation **ROS Kinetic ONLY supports Wily (Ubuntu 15.10), Xenial (Ubuntu 16.04) and Jessie (Debian 8) for debian packages. ** ,参考文献{1}官网强调的东西要仔细看,避免事倍功半。
配置
1.配置软件库
桌面点击系统设置进入下图所示
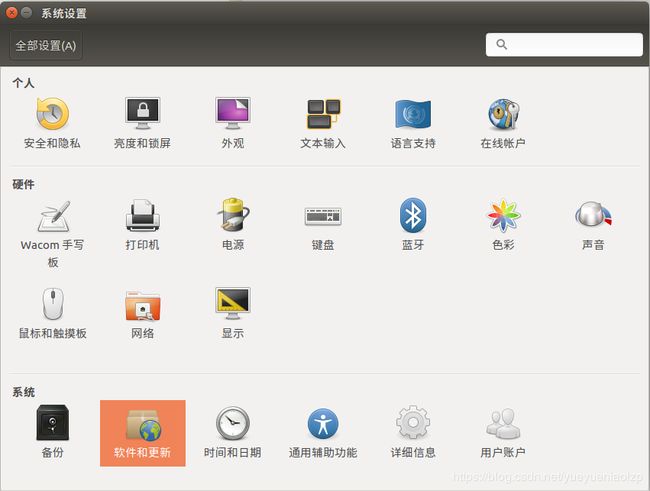
点击软件和更新进入下图所示

点击Ubuntu软件标题栏,选中上图中的选项(“main”, “restricted”, “universe” and “multiverse” )并保存;参考文献{3}提醒,通常也会设置“download from”“下载自”,可以选择一个国内的软件源,如:http://mirrors.ustc.edu.cn/ubuntu, 当然也可以设置为其他,或者让系统自动选择最好的。
注意——更改以后,选择“reload”更新软件。“reload”需要一定的时间,一定要耐性等待,如果中途手动停止,后面下载的时候回出现错误,导致安装失败。
2.配置软件源
配置电脑使其能够安装来自packages.ros.org的软件包,命令码如下:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
3.配置Key
如果无法连接上述服务器,可以尝试hkp://pgp.mit.edu:80或者hkp://keyserver.ubuntu.com:80
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
有人说,可以增加本地本国的源,例如再sourcelist里增加163和sohu,这样没必要从外网下载,国内下载速度很快。本人并未亲自验证。
4.更新package
安装前必须滴
sudo apt-get update
安装ROS kinetic
A完整版的一条龙套装
推荐 包含ROS、rqt、rviz、通用机器人函数库、2D/3D仿真器、导航以及2D/3D感知功能。
安装代码一行:
sudo apt-get install ros-kinetic-desktop-full
精心等待……选择好的源,可以嗖嗖嗖地飞装
毕竟需要下载2G多文件安装,时间长点也正常,切勿急躁,请耐心等待。
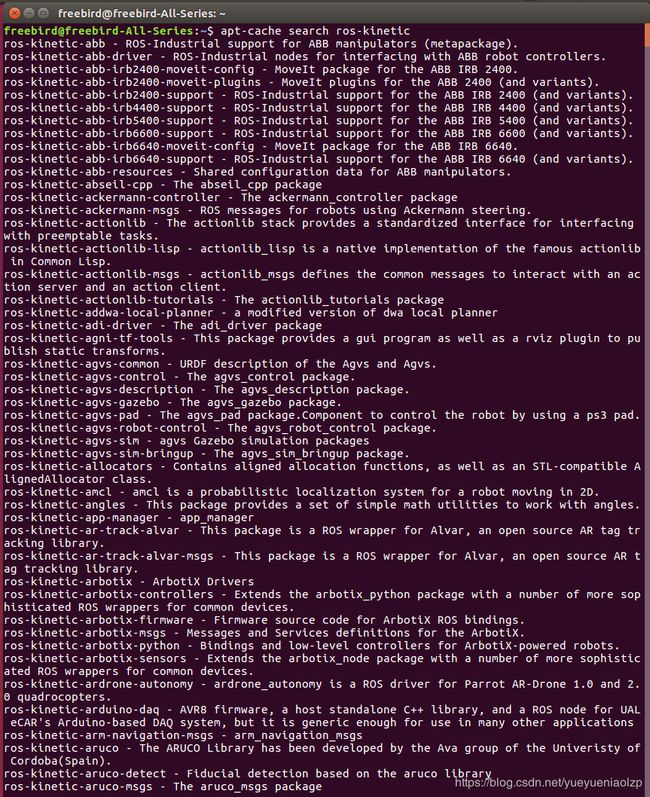
安装完成后,可以查看安装好的ROS package,
apt-cache search ros-kinetic
B自定义安装
已超越了小白阶段,扩展开来又是一篇灌水博文。
1.普通桌面版sudo apt-get install ros-Kinetic-desktop
2.无GUI基础版sudo apt-get install ros-Kinetic-ros-base
3.单包一个一个来版sudo apt-get install ros-Kinetic-xxxx
4.缺啥补啥版//sudo apt-get install ros-Kinetic-xxxx
注意ROS版本多更新快,工具包也各有各的特定支持ROS版本,使用的时候一定要注意,最好仔细阅读官网参考说明和社区技术贴。
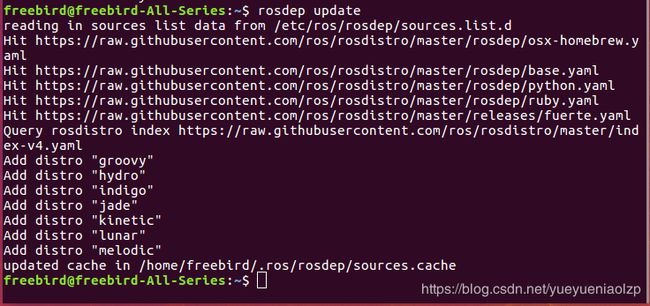
初始化ROSDEP
1.初始化sudo rosdep init
2.更新rosdep update
在使用ROS之前必须要初始化rosdep
环境配置
每次终端运行时自动化地配置好ROS的系统环境变量,不用重新配置,提高效率方便实战。
1.初始化
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
2.更新
source ~/.bashrc
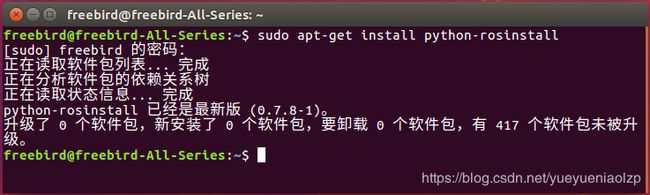
package依赖(安装rosinstall)
rosinstall 是ROS中一个独立分开的常用命令行工具,它可以方便让你通过一条命令就可以给某个ROS软件包下载很多源码树。
安装代码一行:
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
或者简单粗暴的
sudo apt-get install python-rosinstall
如能成功到此而无错误,则安装基本OK,但不等于必然成功。还需要验证一下才可放心。
ROS Kinetic测试
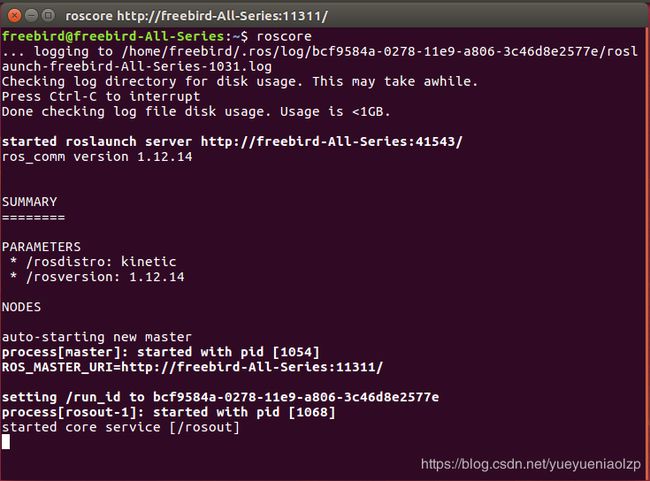
ROS到位
打开终端,初始化ROS环境以使其准备到位:
输入指令代码roscore
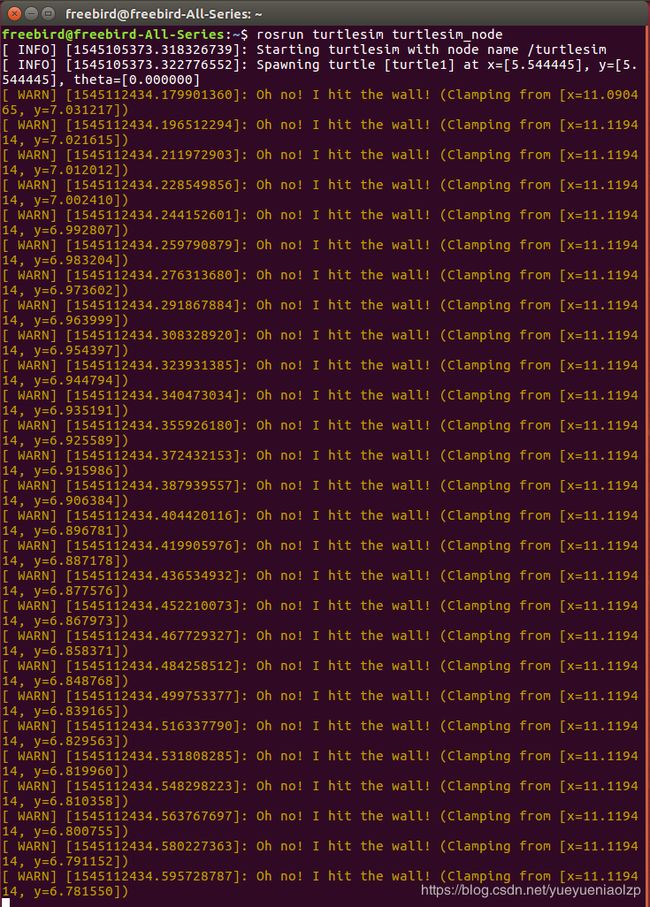
乌龟到位
打开又另一个新的终端,ROS界面建立使小乌龟准备到位:
输入指令代码rosrun turtlesim turtlesim_node

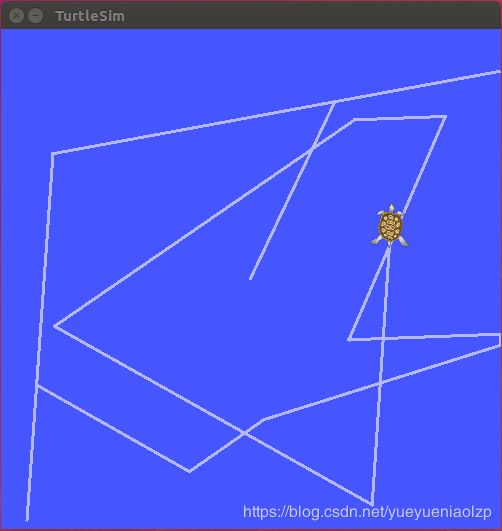
乌龟run起来
打开又双另一个新的终端,ROS界面建立的小乌龟跑起来:
输入指令代码rosrun turtlesim turtle_teleop_key
通过键盘上四个方向键控制小乌龟运动。按快了久了抖了,小乌龟就会撞墙的!
[1]: http://www.ros.org/
[2]: http://wiki.ros.org/kinetic/Installation/Ubuntu
[3]: https://blog.csdn.net/xuehuafeiwu123/article/details/52549872
[4]: https://blog.csdn.net/softimite_zifeng/article/details/78632211