视觉slam十四讲--VO框架基础学习笔记:构建vo框架,并运行TUM数据集程序
视觉里程计学习:构建vo框架,并运行程序
- 建立config文件夹和其下的文件
- 建立include/myslam文件夹及其下的文件
- 创建data文件夹添加TUM数据集
- 建立src文件夹及其下的文件
- 建立test文件夹及其下的文件
- g2o安装编译后的cmake_modules文件夹
- 代码运行(命令行运行和kdevelop运行)
- 遇到的问题
首先是创建一个project 1文件夹,进入该文件夹后,创建bin文件夹和lib文件夹,并在当前目录下创建一个CMakeLists.txt文件,内容如下:
# 声明要求的 cmake 最低版本
cmake_minimum_required( VERSION 2.8 )
# 声明一个 cmake 工程
project( myslam )
# 添加一个可执行程序
# 语法:add_executable( 程序名 源代码文件 )
set( CMAKE_CXX_COMPILER "g++" )
set( CMAKE_BUILD_TYPE "Release" )
set( CMAKE_CXX_FLAGS "-std=c++11 -march=native -O3" )
list( APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake_modules )
set( EXECUTABLE_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/bin )
set( LIBRARY_OUTPUT_PATH ${PROJECT_SOURCE_DIR}/lib )
############### dependencies ######################
# Eigen
include_directories( "/usr/include/eigen3" )
# OpenCV
find_package( OpenCV REQUIRED )
include_directories( ${OpenCV_INCLUDE_DIRS} )
# Sophus
find_package( Sophus REQUIRED )
include_directories( ${Sophus_INCLUDE_DIRS} )
# G2O
find_package( G2O REQUIRED )
include_directories( ${G2O_INCLUDE_DIRS} )
set( THIRD_PARTY_LIBS
${OpenCV_LIBS}
${Sophus_LIBRARIES}
g2o_core g2o_stuff g2o_types_sba
)
############### source and test ######################
include_directories( ${PROJECT_SOURCE_DIR}/include )
add_subdirectory( src )
add_subdirectory( test )
建立config文件夹和其下的文件
在project 1文件夹下创建config文件夹后,在其文件夹下创建default.yaml文件,内容如下:
%YAML:1.0
# data
# the tum dataset directory, change it to yours!
dataset_dir: /home/li/slam/myslam/project 1/data/rgbd_dataset_freiburg1_xyz
# camera intrinsics
# fr1
camera.fx: 517.3
camera.fy: 516.5
camera.cx: 325.1
camera.cy: 249.7
camera.depth_scale: 5000
# VO paras
number_of_features: 500
scale_factor: 1.2
level_pyramid: 8
match_ratio: 2.0
max_num_lost: 10
min_inliers: 10
keyframe_rotation: 0.1
keyframe_translation: 0.1
**注意:**文件前面不能有空行或注释,而dataset_dir要修改为自己的TUM数据集所在的位置。
建立include/myslam文件夹及其下的文件
在project 1文件夹下创建include/myslam文件夹,然后在其下创建各类的头文件:
创建camera.h,内容如下:
#ifndef CAMERA_H
#define CAMERA_H
#include "myslam/common_include.h"
namespace myslam
{
// Pinhole RGB-D camera model
class Camera
{
public:
typedef std::shared_ptr Ptr;
float fx_, fy_, cx_, cy_, depth_scale_; // Camera intrinsics
Camera();
Camera ( float fx, float fy, float cx, float cy, float depth_scale=0 ) :
fx_ ( fx ), fy_ ( fy ), cx_ ( cx ), cy_ ( cy ), depth_scale_ ( depth_scale )
{}
// coordinate transform: world, camera, pixel
Vector3d world2camera( const Vector3d& p_w, const SE3& T_c_w );
Vector3d camera2world( const Vector3d& p_c, const SE3& T_c_w );
Vector2d camera2pixel( const Vector3d& p_c );
Vector3d pixel2camera( const Vector2d& p_p, double depth=1 );
Vector3d pixel2world ( const Vector2d& p_p, const SE3& T_c_w, double depth=1 );
Vector2d world2pixel ( const Vector3d& p_w, const SE3& T_c_w );
};
}
#endif // CAMERA_H
创建common_include.h文件,内容如下:
#ifndef COMMON_INCLUDE_H
#define COMMON_INCLUDE_H
// define the commonly included file to avoid a long include list
// for Eigen
#include
#include
using Eigen::Vector2d;
using Eigen::Vector3d;
// for Sophus
#include
#include
using Sophus::SE3;
using Sophus::SO3;
// for cv
#include
using cv::Mat;
// std
#include
#include
#include
#include
#include
#include
#include
#include
创建config.h文件,内容为:
#ifndef CONFIG_H
#define CONFIG_H
#include "myslam/common_include.h"
namespace myslam
{
class Config
{
private:
static std::shared_ptr config_;
cv::FileStorage file_;
Config () {} // private constructor makes a singleton
public:
~Config(); // close the file when deconstructing
// set a new config file
static void setParameterFile( const std::string& filename );
// access the parameter values
template< typename T >
static T get( const std::string& key )
{
return T( Config::config_->file_[key] );
}
};
}
#endif // CONFIG_H
创建frame.h文件,内容为:
#ifndef FRAME_H
#define FRAME_H
#include "myslam/common_include.h"
#include "myslam/camera.h"
namespace myslam
{
class MapPoint;
class Frame
{
public:
typedef std::shared_ptr Ptr;
unsigned long id_; // id of this frame
double time_stamp_; // when it is recorded
SE3 T_c_w_; // transform from world to camera
Camera::Ptr camera_; // Pinhole RGB-D Camera model
Mat color_, depth_; // color and depth image
public: // data members
Frame();
Frame( long id, double time_stamp=0, SE3 T_c_w=SE3(), Camera::Ptr camera=nullptr, Mat color=Mat(),
Mat depth=Mat() );
~Frame();
// factory function
static Frame::Ptr createFrame();
// find the depth in depth map
double findDepth( const cv::KeyPoint& kp );
// Get Camera Center
Vector3d getCamCenter() const;
// check if a point is in this frame
bool isInFrame( const Vector3d& pt_world );
};
}
#endif // FRAME_H
创建map.h文件,内容如下:
#ifndef MAP_H
#define MAP_H
#include "myslam/common_include.h"
#include "myslam/frame.h"
#include "myslam/mappoint.h"
namespace myslam
{
class Map
{
public:
typedef shared_ptr创建mappoint.h文件,内容如下:
#ifndef MAPPOINT_H
#define MAPPOINT_H
namespace myslam
{
class Frame;
class MapPoint
{
public:
typedef shared_ptr Ptr;
unsigned long id_; // ID
Vector3d pos_; // Position in world
Vector3d norm_; // Normal of viewing direction
Mat descriptor_; // Descriptor for matching
int observed_times_; // being observed by feature matching algo.
int correct_times_; // being an inliner in pose estimation
MapPoint();
MapPoint( long id, Vector3d position, Vector3d norm );
// factory function
static MapPoint::Ptr createMapPoint();
};
}
#endif // MAPPOINT_H
创建visual_odometry.h文件,内容如下:
#ifndef VISUALODOMETRY_H
#define VISUALODOMETRY_H
#include "myslam/common_include.h"
#include "myslam/map.h"
#include
namespace myslam
{
class VisualOdometry
{
public:
typedef shared_ptr Ptr;
enum VOState {
INITIALIZING=-1,
OK=0,
LOST
};
VOState state_; // current VO status
Map::Ptr map_; // map with all frames and map points
Frame::Ptr ref_; // reference frame
Frame::Ptr curr_; // current frame
cv::Ptr orb_; // orb detector and computer
vector pts_3d_ref_; // 3d points in reference frame
vector keypoints_curr_; // keypoints in current frame
Mat descriptors_curr_; // descriptor in current frame
Mat descriptors_ref_; // descriptor in reference frame
vector feature_matches_;
SE3 T_c_r_estimated_; // the estimated pose of current frame
int num_inliers_; // number of inlier features in icp
int num_lost_; // number of lost times
// parameters
int num_of_features_; // number of features
double scale_factor_; // scale in image pyramid
int level_pyramid_; // number of pyramid levels
float match_ratio_; // ratio for selecting good matches
int max_num_lost_; // max number of continuous lost times
int min_inliers_; // minimum inliers
double key_frame_min_rot; // minimal rotation of two key-frames
double key_frame_min_trans; // minimal translation of two key-frames
public: // functions
VisualOdometry();
~VisualOdometry();
bool addFrame( Frame::Ptr frame ); // add a new frame
protected:
// inner operation
void extractKeyPoints();
void computeDescriptors();
void featureMatching();
void poseEstimationPnP();
void setRef3DPoints();
void addKeyFrame();
bool checkEstimatedPose();
bool checkKeyFrame();
};
}
#endif // VISUALODOMETRY_H
创建data文件夹添加TUM数据集
在project 1文件夹下创建data文件夹
从 https://vision.in.tum.de/data/datasets/rgbd-dataset/download.下载fr1/xyz,得到一个简单的数据集,将下载的数据集放到当前创建的data文件夹里,然后在如下图所示的地方下载associate.py文件
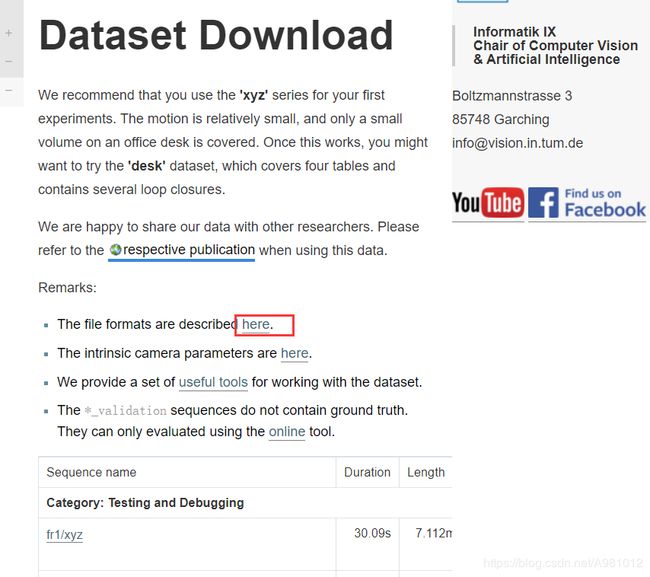

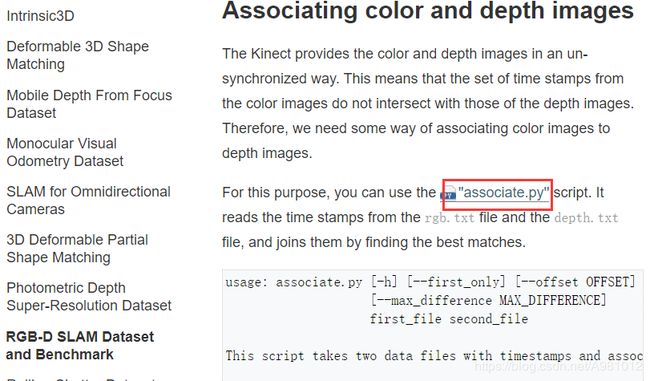
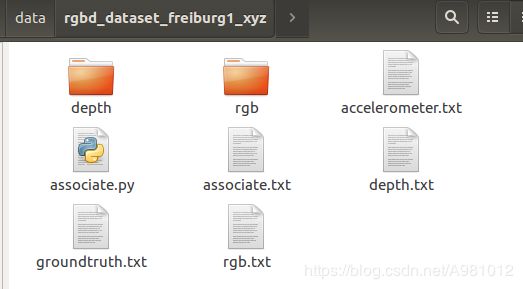
然后进入数据集的文件夹,associate.py下载到该目录下,然后使用命令对时间
python associate.py rgb.txt depth.txt > associate.txt
命令会根据输入两个文件中的采集时间进行配对,最后输出到一个文件 associate.txt。输出文件含有被配对的两个图像的时间、文件名信息,可以作为后续处理的来源。
建立src文件夹及其下的文件
在project 1文件夹下创建src文件夹并在该文件夹下创建文件
创建camera.cpp文件,内容如下:
#include "myslam/camera.h"
#include "myslam/config.h"
namespace myslam
{
Camera::Camera()
{
fx_ = Config::get("camera.fx");
fy_ = Config::get("camera.fy");
cx_ = Config::get("camera.cx");
cy_ = Config::get("camera.cy");
depth_scale_ = Config::get("camera.depth_scale");
}
Vector3d Camera::world2camera ( const Vector3d& p_w, const SE3& T_c_w )
{
return T_c_w*p_w;
}
Vector3d Camera::camera2world ( const Vector3d& p_c, const SE3& T_c_w )
{
return T_c_w.inverse() *p_c;
}
Vector2d Camera::camera2pixel ( const Vector3d& p_c )
{
return Vector2d (
fx_ * p_c ( 0,0 ) / p_c ( 2,0 ) + cx_,
fy_ * p_c ( 1,0 ) / p_c ( 2,0 ) + cy_
);
}
Vector3d Camera::pixel2camera ( const Vector2d& p_p, double depth )
{
return Vector3d (
( p_p ( 0,0 )-cx_ ) *depth/fx_,
( p_p ( 1,0 )-cy_ ) *depth/fy_,
depth
);
}
Vector2d Camera::world2pixel ( const Vector3d& p_w, const SE3& T_c_w )
{
return camera2pixel ( world2camera ( p_w, T_c_w ) );
}
Vector3d Camera::pixel2world ( const Vector2d& p_p, const SE3& T_c_w, double depth )
{
return camera2world ( pixel2camera ( p_p, depth ), T_c_w );
}
}
创建config.cpp文件,内容如下:
#include "myslam/config.h"
namespace myslam
{
void Config::setParameterFile( const std::string& filename )
{
if ( config_ == nullptr )
config_ = shared_ptr(new Config);
config_->file_ = cv::FileStorage( filename.c_str(), cv::FileStorage::READ );
if ( config_->file_.isOpened() == false )
{
std::cerr<<"parameter file "<file_.release();
return;
}
}
Config::~Config()
{
if ( file_.isOpened() )
file_.release();
}
shared_ptr Config::config_ = nullptr;
}
创建frame.cpp文件,内容如下:
#include "myslam/frame.h"
namespace myslam
{
Frame::Frame()
: id_(-1), time_stamp_(-1), camera_(nullptr)
{
}
Frame::Frame(long id, double time_stamp, SE3 T_c_w, Camera::Ptr camera, Mat color, Mat depth)
: id_(id), time_stamp_(time_stamp), T_c_w_(T_c_w), camera_(camera), color_(color), depth_(depth)
{
}
Frame::~Frame()
{
}
// 创建 Frame
Frame::Ptr Frame::createFrame()
{
static long factory_id = 0;
return Frame::Ptr(new Frame(factory_id++));
}
// 寻找给定点对应的深度
double Frame::findDepth(const cv::KeyPoint& kp)
{
int x = cvRound(kp.pt.x);
int y = cvRound(kp.pt.y);
ushort d = depth_.ptr(y)[x];
if (d != 0)
{
return double(d) / camera_->depth_scale_;
}
else
{
// 检查附近的地点
int dx[4] = { -1,0,1,0 };
int dy[4] = { 0,-1,0,1 };
for (int i = 0; i < 4; i++)
{
d = depth_.ptr(y + dy[i])[x + dx[i]];
if (d != 0)
{
return double(d) / camera_->depth_scale_;
}
}
}
return -1.0;
}
// 获取相机光心
Vector3d Frame::getCamCenter() const
{
return T_c_w_.inverse().translation();
}
// 判断某个点是否在视野内
bool Frame::isInFrame(const Vector3d& pt_world)
{
Vector3d p_cam = camera_->world2camera(pt_world, T_c_w_);
if (p_cam(2, 0) < 0)
return false;
Vector2d pixel = camera_->world2pixel(pt_world, T_c_w_);
return pixel(0, 0) > 0 && pixel(1, 0) > 0
&& pixel(0, 0) < color_.cols
&& pixel(1, 0) < color_.rows;
}
}
创建map.cpp文件,内容如下:
#include "myslam/map.h"
namespace myslam
{
void Map::insertKeyFrame(Frame::Ptr frame)
{
cout << "Key frame size = " << keyframes_.size() << endl;
if (keyframes_.find(frame->id_) == keyframes_.end())
{
keyframes_.insert(make_pair(frame->id_, frame));
}
else
{
keyframes_[frame->id_] = frame;
}
}
void Map::insertMapPoint(MapPoint::Ptr map_point)
{
if (map_points_.find(map_point->id_) == map_points_.end())
{
map_points_.insert(make_pair(map_point->id_, map_point));
}
else
{
map_points_[map_point->id_] = map_point;
}
}
}
创建mappoint.cpp文件,内容如下:
#include "myslam/common_include.h"
#include "myslam/mappoint.h"
namespace myslam
{
MapPoint::MapPoint()
: id_(-1), pos_(Vector3d(0, 0, 0)), norm_(Vector3d(0, 0, 0)), observed_times_(0), correct_times_(0)
{
}
MapPoint::MapPoint(long id, Vector3d position, Vector3d norm)
: id_(id), pos_(position), norm_(norm), observed_times_(0), correct_times_(0)
{
}
// 建立MapPoint
MapPoint::Ptr MapPoint::createMapPoint()
{
static long factory_id = 0;
return MapPoint::Ptr(
new MapPoint(factory_id++, Vector3d(0, 0, 0), Vector3d(0, 0, 0))
);
}
}
创建visual_odometry.cpp文件,内容如下:
#include
#include
#include
#include
#include
#include "myslam/config.h"
#include "myslam/visual_odometry.h"
namespace myslam
{
VisualOdometry::VisualOdometry() :
state_ ( INITIALIZING ), ref_ ( nullptr ), curr_ ( nullptr ), map_ ( new Map ), num_lost_ ( 0 ), num_inliers_ ( 0 )
{
num_of_features_ = Config::get ( "number_of_features" );
scale_factor_ = Config::get ( "scale_factor" );
level_pyramid_ = Config::get ( "level_pyramid" );
match_ratio_ = Config::get ( "match_ratio" );
max_num_lost_ = Config::get ( "max_num_lost" );
min_inliers_ = Config::get ( "min_inliers" );
key_frame_min_rot = Config::get ( "keyframe_rotation" );
key_frame_min_trans = Config::get ( "keyframe_translation" );
orb_ = cv::ORB::create ( num_of_features_, scale_factor_, level_pyramid_ );
}
VisualOdometry::~VisualOdometry()
{
}
bool VisualOdometry::addFrame ( Frame::Ptr frame )
{
switch ( state_ )
{
case INITIALIZING:
{
state_ = OK;
curr_ = ref_ = frame;
map_->insertKeyFrame ( frame );
// extract features from first frame
extractKeyPoints();
computeDescriptors();
// compute the 3d position of features in ref frame
setRef3DPoints();
break;
}
case OK:
{
curr_ = frame;
extractKeyPoints();
computeDescriptors();
featureMatching();
poseEstimationPnP();
if ( checkEstimatedPose() == true ) // a good estimation
{
curr_->T_c_w_ = T_c_r_estimated_ * ref_->T_c_w_; // T_c_w = T_c_r*T_r_w
ref_ = curr_;
setRef3DPoints();
num_lost_ = 0;
if ( checkKeyFrame() == true ) // is a key-frame
{
addKeyFrame();
}
}
else // bad estimation due to various reasons
{
num_lost_++;
if ( num_lost_ > max_num_lost_ )
{
state_ = LOST;
}
return false;
}
break;
}
case LOST:
{
cout<<"vo has lost."<detect ( curr_->color_, keypoints_curr_ );
}
void VisualOdometry::computeDescriptors()
{
orb_->compute ( curr_->color_, keypoints_curr_, descriptors_curr_ );
}
void VisualOdometry::featureMatching()
{
// match desp_ref and desp_curr, use OpenCV's brute force match
vector matches;
cv::BFMatcher matcher ( cv::NORM_HAMMING );
matcher.match ( descriptors_ref_, descriptors_curr_, matches );
// select the best matches
float min_dis = std::min_element (
matches.begin(), matches.end(),
[] ( const cv::DMatch& m1, const cv::DMatch& m2 )
{
return m1.distance < m2.distance;
} )->distance;
feature_matches_.clear();
for ( cv::DMatch& m : matches )
{
if ( m.distance < max ( min_dis*match_ratio_, 30.0 ) )
{
feature_matches_.push_back(m);
}
}
cout<<"good matches: "<findDepth(keypoints_curr_[i]);
if ( d > 0)
{
Vector3d p_cam = ref_->camera_->pixel2camera(
Vector2d(keypoints_curr_[i].pt.x, keypoints_curr_[i].pt.y), d
);
pts_3d_ref_.push_back( cv::Point3f( p_cam(0,0), p_cam(1,0), p_cam(2,0) ));
descriptors_ref_.push_back(descriptors_curr_.row(i));
}
}
}
void VisualOdometry::poseEstimationPnP()
{
// construct the 3d 2d observations
vector pts3d;
vector pts2d;
for ( cv::DMatch m:feature_matches_ )
{
pts3d.push_back( pts_3d_ref_[m.queryIdx] );
pts2d.push_back( keypoints_curr_[m.trainIdx].pt );
}
Mat K = ( cv::Mat_(3,3)<<
ref_->camera_->fx_, 0, ref_->camera_->cx_,
0, ref_->camera_->fy_, ref_->camera_->cy_,
0,0,1
);
Mat rvec, tvec, inliers;
cv::solvePnPRansac( pts3d, pts2d, K, Mat(), rvec, tvec, false, 100, 4.0, 0.99, inliers );
num_inliers_ = inliers.rows;
cout<<"pnp inliers: "<(0,0), rvec.at(1,0), rvec.at(2,0)),
Vector3d( tvec.at(0,0), tvec.at(1,0), tvec.at(2,0))
);
}
bool VisualOdometry::checkEstimatedPose()
{
// check if the estimated pose is good
if ( num_inliers_ < min_inliers_ )
{
cout<<"reject because inlier is too small: "< 5.0 )
{
cout<<"reject because motion is too large: "<();
Vector3d rot = d.tail<3>();
if ( rot.norm() >key_frame_min_rot || trans.norm() >key_frame_min_trans )
return true;
return false;
}
void VisualOdometry::addKeyFrame()
{
cout<<"adding a key-frame"<insertKeyFrame ( curr_ );
}
}
创建CMakeLists.txt文件,内容如下:
add_library( myslam SHARED
frame.cpp
mappoint.cpp
map.cpp
camera.cpp
config.cpp
visual_odometry.cpp
)
target_link_libraries( myslam
${THIRD_PARTY_LIBS}
)
建立test文件夹及其下的文件
在project 1文件夹下创建test文件夹,在该文件夹下创建CMakeLists.txt文件,内容如下:
add_executable( run_vo run_vo.cpp )
target_link_libraries( run_vo myslam )
创建run_vo.cpp,这是一个测试的程序,内容如下:
#include
#include
#include
#include
#include
#include "myslam/config.h"
#include "myslam/visual_odometry.h"
int main ( int argc, char** argv )
{
if ( argc != 2 )
{
cout<<"usage: run_vo parameter_file"< ( "dataset_dir" );
cout<<"dataset: "< rgb_files, depth_files;
vector rgb_times, depth_times;
while ( !fin.eof() )
{
string rgb_time, rgb_file, depth_time, depth_file;
fin>>rgb_time>>rgb_file>>depth_time>>depth_file;
rgb_times.push_back ( atof ( rgb_time.c_str() ) );
depth_times.push_back ( atof ( depth_time.c_str() ) );
rgb_files.push_back ( dataset_dir+"/"+rgb_file );
depth_files.push_back ( dataset_dir+"/"+depth_file );
if ( fin.good() == false )
break;
}
myslam::Camera::Ptr camera ( new myslam::Camera );
// visualization
cv::viz::Viz3d vis("Visual Odometry");
cv::viz::WCoordinateSystem world_coor(1.0), camera_coor(0.5);
cv::Point3d cam_pos( 0, -1.0, -1.0 ), cam_focal_point(0,0,0), cam_y_dir(0,1,0);
cv::Affine3d cam_pose = cv::viz::makeCameraPose( cam_pos, cam_focal_point, cam_y_dir );
vis.setViewerPose( cam_pose );
world_coor.setRenderingProperty(cv::viz::LINE_WIDTH, 2.0);
camera_coor.setRenderingProperty(cv::viz::LINE_WIDTH, 1.0);
vis.showWidget( "World", world_coor );
vis.showWidget( "Camera", camera_coor );
cout<<"read total "<camera_ = camera;
pFrame->color_ = color;
pFrame->depth_ = depth;
pFrame->time_stamp_ = rgb_times[i];
boost::timer timer;
vo->addFrame ( pFrame );
cout<<"VO costs time: "<state_ == myslam::VisualOdometry::LOST )
break;
SE3 Tcw = pFrame->T_c_w_.inverse();
// show the map and the camera pose
cv::Affine3d M(
cv::Affine3d::Mat3(
Tcw.rotation_matrix()(0,0), Tcw.rotation_matrix()(0,1), Tcw.rotation_matrix()(0,2),
Tcw.rotation_matrix()(1,0), Tcw.rotation_matrix()(1,1), Tcw.rotation_matrix()(1,2),
Tcw.rotation_matrix()(2,0), Tcw.rotation_matrix()(2,1), Tcw.rotation_matrix()(2,2)
),
cv::Affine3d::Vec3(
Tcw.translation()(0,0), Tcw.translation()(1,0), Tcw.translation()(2,0)
)
);
cv::imshow("image", color );
cv::waitKey(1);
vis.setWidgetPose( "Camera", M);
vis.spinOnce(1, false);
}
return 0;
}
g2o安装编译后的cmake_modules文件夹
将g2o安装编译后的cmake_modules复制到project 1文件夹下
所有的文件夹:

代码运行(命令行运行和kdevelop运行)
在project 1文件夹目录下,右键,在终端中打开,输入下面的命令:
mkdir build
cd build
cmake ..
make
cd ..
bin/run_vo config/default.yaml
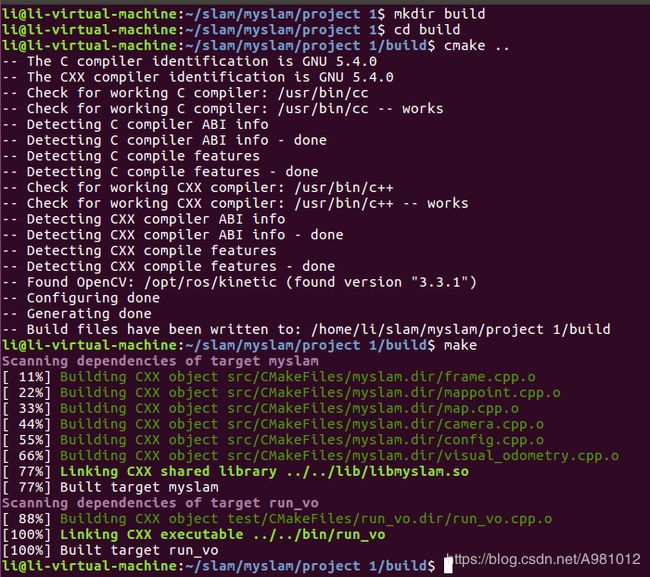
运行结果为:
在kdevelop中运行,就是打开kdevelop,然后选择project选项下的open/Import Project
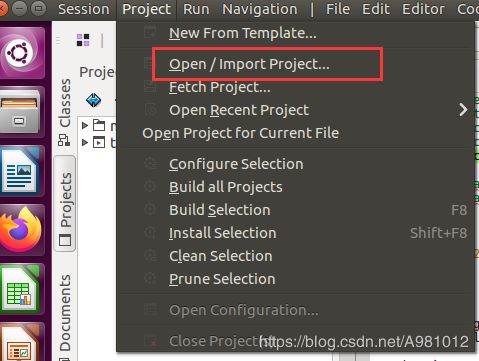
找到之前创建的project 1文件夹,点击finish,文件夹就添加到kdevelop中,
之后点击test文件夹下的run_vo.cpp文件,在代码框显示出来后就点击project选项下的Build Selection,编译这个文件


然后点击Run选项下的Configure Launches,点击Add New,后面操作如下所示,改成自己的路径,点击ok

点击run选项下的Current Launch Configuration,选择自己新建的那个Launch configuration

再点击Execute 就可以看到程序运行,结果显示了

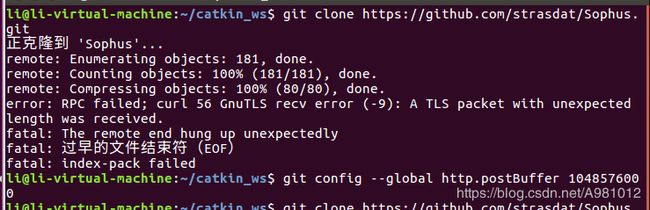
遇到的问题

从提示中可以看到是我们没有过安装sophus或者是没安装好,反正就是找不到sophus,所以我们需要对sophus进行安装。
https://blog.csdn.net/u011092188/article/details/77833022.
sophus编译完成:

这个问题我没有解决掉,有知道的大佬请赐教。
如有错误请指正!
参考代码:https://github.com/gaoxiang12/slambook/tree/master/project/0.2.
参考书籍:视觉slam十四讲-高翔.pdf