对抗自编码器AAE——pytorch代码解读试验
AAE网络结构基本框架如论文中所示:

闲话不多说,直接来学习一下加了注释和微调的基本AAE的代码(初始代码链接github):
aae_pytorch_basic.py
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
# 加载必要的库
import argparse
import torch
import pickle
import numpy as np
from torch.autograd import Variable
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
import pylab
import matplotlib.pyplot as plt
from matplotlib import gridspec
import scipy.misc
# import viz
from viz import get_X_batch
from viz import create_reconstruction
from viz import grid_plot
from viz import grid_plot2d
# Training settings
# 训练时的一些设置,若未设置则使用默认值
# 模型描述
parser = argparse.ArgumentParser(description='PyTorch unsupervised MNIST')
# batch_size
parser.add_argument('--batch-size', type=int, default=100, metavar='N',
help='input batch size for training (default: 100)')
# 迭代次数
parser.add_argument('--epochs', type=int, default=500, metavar='N',
help='number of epochs to train (default: 10)')
args = parser.parse_args()
cuda = torch.cuda.is_available()
# 在神经网络中,参数默认是进行随机初始化的。不同的初始化参数往往会导致不同的结果,当得到比较好的结果时我们通常希望这个结果是可以复现的,
# 在pytorch中,通过设置随机数种子也可以达到这么目的。
seed = 10
kwargs = {'num_workers': 1, 'pin_memory': True} if cuda else {} # GPU的一些设置
n_classes = 10 # 类别数,在无监督学习中未用到
z_dim = 2
X_dim = 784
y_dim = 10
train_batch_size = args.batch_size
valid_batch_size = args.batch_size
# train_batch_size = 128
# valid_batch_size = 1
N = 1000
# epochs = args.epochs
epochs = 10000
valid_params = dict(train_batch_size=valid_batch_size, X_dim=X_dim, cuda=cuda, n_classes=n_classes, z_dim=z_dim)
##################################
# Load data and create Data loaders
# 加载处理好的数据,处理的程序在create_datasets.py中
##################################
def load_data(data_path='../data/'):
print('loading data!')
# 有标签的训练集
trainset_labeled = pickle.load(open(data_path + "train_labeled.p", "rb"))
# 无标签的训练集
trainset_unlabeled = pickle.load(open(data_path + "train_unlabeled.p", "rb"))
# Set -1 as labels for unlabeled data
# 对于无标签的数据,将标签设置为-1
trainset_unlabeled.train_labels = torch.from_numpy(np.array([-1] * 47000))
# 验证集
validset = pickle.load(open(data_path + "validation.p", "rb"))
# 有标签训练迭代器
train_labeled_loader = torch.utils.data.DataLoader(trainset_labeled,
batch_size=train_batch_size,
shuffle=True, **kwargs)
# 无标签训练迭代器
train_unlabeled_loader = torch.utils.data.DataLoader(trainset_unlabeled,
batch_size=train_batch_size,
shuffle=True, **kwargs)
# 验证/测试迭代器
valid_loader = torch.utils.data.DataLoader(validset, batch_size=valid_batch_size, shuffle=True)
# 函数返回几个迭代器
return train_labeled_loader, train_unlabeled_loader, valid_loader
##################################
# Define Networks
# 定义网络结构
##################################
# Encoder
# 编码器
class Q_net(nn.Module):
def __init__(self):
super(Q_net, self).__init__()
self.lin1 = nn.Linear(X_dim, N)
self.lin2 = nn.Linear(N, N)
# Gaussian code (z)
self.lin3gauss = nn.Linear(N, z_dim)
def forward(self, x):
# 2 ×(全连接+随机失活+relu)+(全连接)
x = F.dropout(self.lin1(x), p=0.2, training=self.training)
x = F.relu(x)
x = F.dropout(self.lin2(x), p=0.2, training=self.training)
x = F.relu(x)
xgauss = self.lin3gauss(x)
return xgauss
# Decoder
# 解码器
class P_net(nn.Module):
def __init__(self):
super(P_net, self).__init__()
self.lin1 = nn.Linear(z_dim, N)
self.lin2 = nn.Linear(N, N)
self.lin3 = nn.Linear(N, X_dim)
def forward(self, x):
# 2 ×(全连接+随机失活+relu)+(全连接+sigmoid)
x = self.lin1(x)
x = F.dropout(x, p=0.2, training=self.training)
x = F.relu(x)
x = self.lin2(x)
x = F.dropout(x, p=0.2, training=self.training)
x = self.lin3(x)
return F.sigmoid(x)
# Discriminator
# 判别器
class D_net_gauss(nn.Module):
def __init__(self):
super(D_net_gauss, self).__init__()
self.lin1 = nn.Linear(z_dim, N)
self.lin2 = nn.Linear(N, N)
self.lin3 = nn.Linear(N, 1)
def forward(self, x):
# 2 ×(全连接+随机失活+relu)+(全连接+sigmoid)
x = F.dropout(self.lin1(x), p=0.2, training=self.training)
x = F.relu(x)
x = F.dropout(self.lin2(x), p=0.2, training=self.training)
x = F.relu(x)
return F.sigmoid(self.lin3(x))
####################
# Utility functions
# 一些有用的函数
####################
def save_model(model, filename):
# 保存训练模型
print('Best model so far, saving it...')
torch.save(model.state_dict(), filename)
def report_loss(epoch, D_loss_gauss, G_loss, recon_loss):
'''
Print loss
'''
# 显示损失
print('Epoch-{}; D_loss_gauss: {:.4}; G_loss: {:.4}; recon_loss: {:.4}'.format(epoch,
D_loss_gauss.data[0],
G_loss.data[0],
recon_loss.data[0]))
def create_latent(Q, loader):
'''
Creates the latent representation for the samples in loader
return:
z_values: numpy array with the latent representations
labels: the labels corresponding to the latent representations
'''
# 对于迭代器中的样本创建隐表达
Q.eval() # 不启用编码器中的随机失活(和批标准化)
labels = []
for batch_idx, (X, target) in enumerate(loader):
X = X * 0.3081 + 0.1307 # 数据集处理
# X.resize_(loader.batch_size, X_dim)
X, target = Variable(X), Variable(target)
labels.extend(target.data.tolist())
# if cuda:
# X, target = X.cuda(), target.cuda()
X, target = X.cuda(), target.cuda()
# Reconstruction phase
z_sample = Q(X) # 隐变量
# 方便连接矩阵,初始化并concatenate连接
if batch_idx > 0:
z_values = np.concatenate((z_values, np.array(z_sample.data.tolist())))
else:
z_values = np.array(z_sample.data.tolist())
labels = np.array(labels)
return z_values, labels
####################
# Train procedure
# 开始训练
####################
def train(P, Q, D_gauss, P_decoder, Q_encoder, Q_generator, D_gauss_solver, data_loader):
'''
Train procedure for one epoch.
'''
# 每一次迭代中的训练过程
TINY = 1e-15
# Set the networks in train mode (apply dropout when needed)
# 启用编码器、解码器、判别器中的随机失活(与批标准化)
Q.train()
P.train()
D_gauss.train()
# Loop through the labeled and unlabeled dataset getting one batch of samples from each
# The batch size has to be a divisor of the size of the dataset or it will return
# invalid samples
for X, target in data_loader:
# Load batch and normalize samples to be between 0 and 1
# 加载batch数据并将数据归一化到0到1的区间
X = X * 0.3081 + 0.1307
X.resize_(train_batch_size, X_dim)
X, target = Variable(X), Variable(target)
# if cuda:
# X, target = X.cuda(), target.cuda()
X, target = X.cuda(), target.cuda()
# Init gradients
# 梯度初始化为0
P.zero_grad()
Q.zero_grad()
D_gauss.zero_grad()
#######################
# Reconstruction phase
# 重构误差项
#######################
z_sample = Q(X) # 输入数据得到的隐变量
X_sample = P(z_sample) # 隐变量解码后得到的重构变量
# 二分类交叉熵,表示重构向量与输入向量的差距
recon_loss = F.binary_cross_entropy(X_sample + TINY, X.resize(train_batch_size, X_dim) + TINY)
# 重构损失反向传播
recon_loss.backward()
# 优化更新编码器与解码器
P_decoder.step()
Q_encoder.step()
# 梯度清零,不希望之前的梯度影响之后的梯度
P.zero_grad()
Q.zero_grad()
D_gauss.zero_grad()
#######################
# Regularization phase
#######################
# Discriminator
# 对于判别器
Q.eval() # 不启用编码器中的随机失活(和批标准化)
# 从一个高斯随机分布中采样隐变量
z_real_gauss = Variable(torch.randn(train_batch_size, z_dim) * 5.)
# if cuda:
# z_real_gauss = z_real_gauss.cuda()
z_real_gauss = z_real_gauss.cuda()
# 由输入数据到编码器中产生的隐变量,目前不一定是高斯分布
z_fake_gauss = Q(X)
# 将两种隐变量分别输入到判别器中,每张图片的每种隐变量对应一个数
D_real_gauss = D_gauss(z_real_gauss)
D_fake_gauss = D_gauss(z_fake_gauss)
# 判别器的损失函数
# 判别器认为真实高斯隐变量为1,从训练数据得到的隐变量为0
D_loss = -torch.mean(torch.log(D_real_gauss + TINY) + torch.log(1 - D_fake_gauss + TINY))
# 判别器损失函数反向传播
D_loss.backward()
# 优化更新判别器
D_gauss_solver.step()
# 梯度再次清零
P.zero_grad()
Q.zero_grad()
D_gauss.zero_grad()
# Generator
# 对于生成器/解码器
Q.train() # 启用编码器中的随机失活
# 由输入数据到编码器中产生的隐变量,目前不一定是高斯分布
z_fake_gauss = Q(X)
# 将隐变量输入到判别器中,每张图片的结果对应一个数
D_fake_gauss = D_gauss(z_fake_gauss)
# 生成器/解码器的损失函数
# 生成器/解码器努力使由输入数据得到的隐变量标签为1,与判别器对抗训练,使得隐变量分布接近于高斯分布
# 生成器/解码器的目标在于生成以假乱真的数据,与GAN不同在于以假乱真是指是否是高斯分布,而非是否是真实数据
G_loss = -torch.mean(torch.log(D_fake_gauss + TINY))
# 生成器/解码器损失函数反向传播
G_loss.backward()
# 优化更新生成器/解码器
Q_generator.step()
# 梯度再次清零
P.zero_grad()
Q.zero_grad()
D_gauss.zero_grad()
# 返回判别器损失、生成器/解码器损失、重构误差损失
return D_loss, G_loss, recon_loss
# 对于生成模型
def generate_model(train_labeled_loader, train_unlabeled_loader, valid_loader):
torch.manual_seed(seed) # seed = 10
# if cuda:
# Q = Q_net().cuda()
# P = P_net().cuda()
# D_gauss = D_net_gauss().cuda()
# else:
# Q = Q_net()
# P = P_net()
# D_gauss = D_net_gauss()
Q = Q_net().cuda()
P = P_net().cuda()
D_gauss = D_net_gauss().cuda()
# Set learning rates
# 设置学习率
gen_lr = 0.0001
reg_lr = 0.00005
# Set optimizators
# 设置优化器
P_decoder = optim.Adam(P.parameters(), lr=gen_lr)
Q_encoder = optim.Adam(Q.parameters(), lr=gen_lr)
# Q_encoder与Q_generator区别在于学习率不同
Q_generator = optim.Adam(Q.parameters(), lr=reg_lr)
D_gauss_solver = optim.Adam(D_gauss.parameters(), lr=reg_lr)
# 对于每次迭代
for epoch in range(epochs):
# 根据每一次迭代执行的训练过程得到每一次迭代的三个损失函数值
D_loss_gauss, G_loss, recon_loss = train(P, Q, D_gauss, P_decoder, Q_encoder,
Q_generator,
D_gauss_solver,
train_unlabeled_loader)
# 测试周期为10次训练迭代测试1次
if epoch % 10 == 0:
report_loss(epoch, D_loss_gauss, G_loss, recon_loss)
create_reconstruction(Q, P, valid_loader, valid_params)
# #########################################
# # 用了viz.py中的代码并进行了部分修改以便于可视化
# #########################################
# Q.eval()
# P.eval()
#
# '''
# ##### 对于pytorch 0.4版本,原始代码会报错:
# ##### RuntimeError: zero-dimensional tensor (at position 0) cannot be concatenated
# ##### 参考博文链接:https://blog.csdn.net/u011415481/article/details/84709487
# '''
# # z1 = Variable(torch.from_numpy(np.arange(-10, 10, 1.5).astype('float32')))
# # z2 = Variable(torch.from_numpy(np.arange(-10, 10, 1.5).astype('float32')))
# z1 = torch.tensor([np.arange(-10, 10, 1.5).astype('float32')])
# z2 = torch.tensor([np.arange(-10, 10, 1.5).astype('float32')])
# # z1, z2 = z1.cuda(), z2.cuda()
#
# nx, ny = len(z1), len(z2)
# plt.subplot()
# gs = gridspec.GridSpec(nx, ny, hspace=0.05, wspace=0.05)
#
# count = 0
# for i, g in enumerate(gs):
# count = count + 1
# # z = torch.cat((z1[int(i / ny)], z2[i % nx])).resize(1, 2)
# print(z1)
# print(z1[:, int(i / ny)])
# print(z2[:, i % nx])
# z = torch.cat((z1[:, int(i / ny)], z2[:, i % nx]))
# z = z.resize(1, 2)
# x = P(z.cuda())
#
# ax = plt.subplot(g)
# img = np.array(x.data.tolist()).reshape(28, 28)
#
# # # 保存
# # scipy.misc.imsave('result/N_' + str(epoch) + '_' + str(count) + '.jpg', img)
#
# ax.imshow(img, )
# ax.set_xticks([])
# ax.set_yticks([])
# ax.set_aspect('auto')
# plt.show()
# # pylab.show()
return Q, P
if __name__ == '__main__':
train_labeled_loader, train_unlabeled_loader, valid_loader = load_data()
Q, P = generate_model(train_labeled_loader, train_unlabeled_loader, valid_loader)
viz.py
import matplotlib
import matplotlib.pyplot as plt
from matplotlib import gridspec
import numpy as np
from torch.autograd import Variable
import torch
def get_X_batch(data_loader, params, size=None):
if size is None:
size = data_loader.batch_size
for X, target in data_loader:
break
train_batch_size = params['train_batch_size']
X_dim = params['X_dim']
cuda = params['cuda']
X = X * 0.3081 + 0.1307
X = X[:size]
target = target[:size]
X.resize_(train_batch_size, X_dim)
X, target = Variable(X), Variable(target)
if cuda:
X, target = X.cuda(), target.cuda()
return X
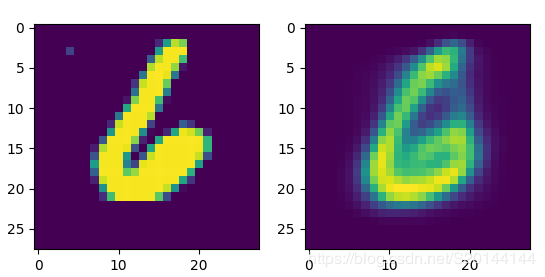
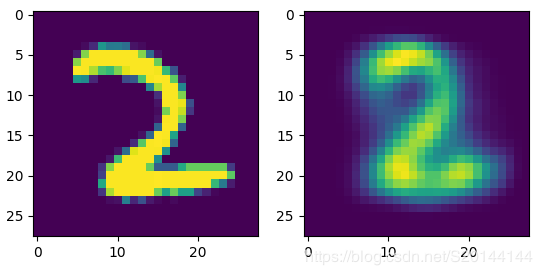
def create_reconstruction(Q, P, data_loader, params):
Q.eval()
P.eval()
X = get_X_batch(data_loader, params, size=1)
# z_c, z_g = Q(X)
# z = torch.cat((z_c, z_g), 1)
z = Q(X)
x = P(z)
img_orig = np.array(X[0].data.tolist()).reshape(28, 28)
img_rec = np.array(x[0].data.tolist()).reshape(28, 28)
plt.subplot(1, 2, 1)
plt.imshow(img_orig)
# plt.show()
plt.subplot(1, 2, 2)
plt.imshow(img_rec)
plt.show()
def grid_plot(Q, P, data_loader, params):
Q.eval()
P.eval()
X = get_X_batch(data_loader, params, size=10)
_, z_g = Q(X)
n_classes = params['n_classes']
cuda = params['cuda']
z_dim = params['z_dim']
z_cat = np.arange(0, n_classes)
z_cat = np.eye(n_classes)[z_cat].astype('float32')
z_cat = torch.from_numpy(z_cat)
z_cat = Variable(z_cat)
if cuda:
z_cat = z_cat.cuda()
nx, ny = 5, n_classes
plt.subplot()
gs = gridspec.GridSpec(nx, ny, hspace=0.05, wspace=0.05)
for i, g in enumerate(gs):
z_gauss = z_g[i / ny].resize(1, z_dim)
z_gauss0 = z_g[i / ny].resize(1, z_dim)
for _ in range(n_classes - 1):
z_gauss = torch.cat((z_gauss, z_gauss0), 0)
z = torch.cat((z_cat, z_gauss), 1)
x = P(z)
ax = plt.subplot(g)
img = np.array(x[i % ny].data.tolist()).reshape(28, 28)
ax.imshow(img, )
ax.set_xticks([])
ax.set_yticks([])
ax.set_aspect('auto')
def grid_plot2d(Q, P, data_loader, params):
Q.eval()
P.eval()
cuda = params['cuda']
z1 = Variable(torch.from_numpy(np.arange(-10, 10, 1.5).astype('float32')))
z2 = Variable(torch.from_numpy(np.arange(-10, 10, 1.5).astype('float32')))
if cuda:
z1, z2 = z1.cuda(), z2.cuda()
nx, ny = len(z1), len(z2)
plt.subplot()
gs = gridspec.GridSpec(nx, ny, hspace=0.05, wspace=0.05)
for i, g in enumerate(gs):
z = torch.cat((z1[i / ny], z2[i % nx])).resize(1, 2)
x = P(z)
ax = plt.subplot(g)
img = np.array(x.data.tolist()).reshape(28, 28)
ax.imshow(img, )
ax.set_xticks([])
ax.set_yticks([])
ax.set_aspect('auto')
在训练过程中,测试集得到的一些重构效果如下图所示: