基于SVM的划线框识别(1)HOG特征提取
虽然上过机器学习的课程,但是那么课既没有课程设计也没有需要敲代码的作业,寻思着毕业设计选一个来挑战一下。“划线框识别”这个题目有两个,一个是深度学习实现,另一个是支持向量机实现,和舍友一人选了一个。考研复试结束了没什么事情,开始动手写这个,指不定自己哪天就忘了。
还是写博客舒服,写论文太痛苦。
工具
python + libsvm + opencv
SVM选择的是C_SVC和RBF内核
背景
刚刚看到题目的时候我以为“划线框”和高中时候用的答题卡差不多,后来给了数据集,感觉没人会叫这东西划线框吧...看了一下确实没有见过,可能一些调查问卷会用这种?调查问卷也只接触过打 √ 打勾的,倒是不需要用2B铅笔来涂。
目标就是用这些数据训练一个SVM模型来实现对这种划线框的识别。
划线框的图片示例(一部分):
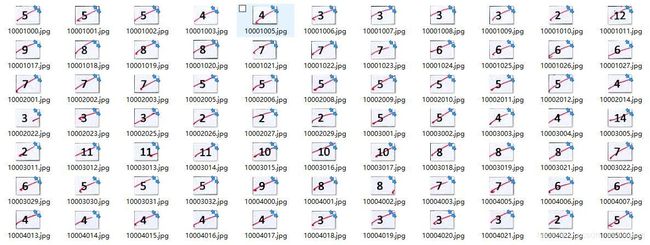 有效样本
有效样本
 无效样本
无效样本
HOG特征提取
选择的特征是HOG特征,后期的时候准确率上不去,想到既然样本里笔迹都是红色的,那么是不是也可以用一下颜色,加了颜色直方图特征,结果相比于原来只用HOG,效果并没有什么变化。
学习的时候参考的是:
python opencv教程里面使用SVM进行手写图片识别以及Histogram of Oriented Gradients,其实搜一下HOG能发现很多博客都翻译过这篇文章。比较着这两篇里面的讲述和代码,差不多能够理解HOG特征提取的流程。在按照这两篇文章学习时的一些问题:
1、我通过Sobel算子在水平方向和竖直方向卷积之后得到的图像如下。
 1:原图像,2:Gx,3:Gy,4:梯度图像
1:原图像,2:Gx,3:Gy,4:梯度图像
而Histogram of Oriented Gradients中使用算子卷积之后的图像是像下面这样的。(分别对应上图的2-4)
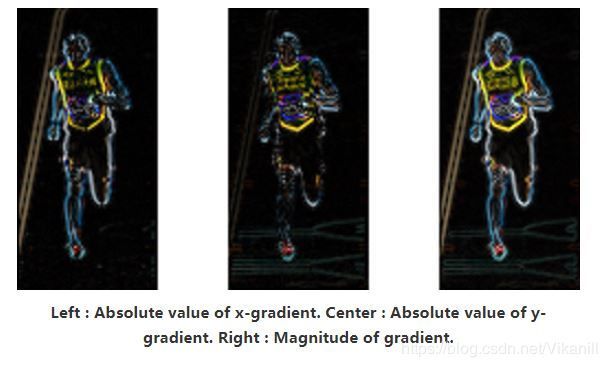
出现这样的情况是因为我计算完梯度之后再显示图片时,每个像素点处值的范围是0~255,只需将其映射到0~1即可。
img = np.float32(img)/255.0
越亮的地方值越大,说明梯度变化也越大。
2、因为最后的block是为了归一化,来减小光照的影响,我看了一下手里的样本,光照的影响几乎没有,于是就将最后block那一步给省略掉了。
HOG特征提取实现代码
计算HOG特征的代码放在末尾,拆开说说其中的几个部分。
1、提取特征之前的预处理。一开始我只是单纯地使用一个阈值进行划分,将图像转换为二值图像,但是在后期训练的时候我发现这样的处理有问题。像是下面这个图像,仅使用单个阈值进行二值化,选项“11”本身在二值化后是被保留的。
![]()
但我们其实并不关心黑色选项,我们只关心红色的笔迹。而且因为有的选项是个位数,有的选项是两位数,有的甚至带着小数点,就会导致选项对提取出的特征有很大的影响,所以需要排除选项对特征提取的干扰。
后期正确率一直上不去。我一开始以为是特征维度不够,试着将HOG划分的更细,也试着增加了颜色直方图特征。对准确率的提升效果都不大。后来使用了双阈值划分,即设置两个阈值min和max,如果像素点的值在min和max之间,那么值被保留,否则被置为0。
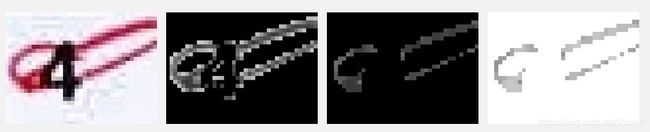 1.原图像 2.双阈值划分后 3.腐蚀后 4.按位取反后
1.原图像 2.双阈值划分后 3.腐蚀后 4.按位取反后
腐蚀是因为只靠双阈值划分还是会有选项的一些边缘残留,因为我的样本图像本身尺寸就很小,只能使用最小的2x2大小的腐蚀算子,用3x3的就差不多已经渣都不剩了。
#输入图像路径,将图像通过两个阈值分割
#阈值分割后的图像按2*2的邻域大小的模板进行腐蚀,只留下划线框
def HandleImgByThreshAndErode(img_gray):
#读取灰度图像
#img_gray = cv.imread(path, cv.IMREAD_GRAYSCALE)
#两个阈值处理
# THRESH_TOZERO将小于阈值的灰度值设为0,大于阈值的值保持不变
retvl, img_gray = cv.threshold(img_gray, svm_parameter.bottom_thresh, 255, cv.THRESH_TOZERO)
# THRESH_TOZERO_INV 将大于阈值的灰度值设为0,小于阈值的值保持不变
retvl, img_gray = cv.threshold(img_gray, svm_parameter.top_thresh, 255, cv.THRESH_TOZERO_INV)
#生成2*2的核 再大会腐蚀过头
kernel = np.ones((2, 2), np.uint8)
#腐蚀灰度图像 迭代一次就够了
img_final = cv.erode(img_gray, kernel, iterations=1)
#按位取反
img_final = cv.bitwise_not(img_final)
#得到的结果还是一个灰度图,可以拿去计算HOG特征
return img_final有了gx和gy之后就可以计算梯度向量,举一个简单情况方便理解。
gx = cv.Sobel(img, cv.CV_32F, 1, 0)
gy = cv.Sobel(img, cv.CV_32F, 0, 1)
#计算梯度和梯度变化方向
mag, ang = cv.cartToPolar(gx, gy)
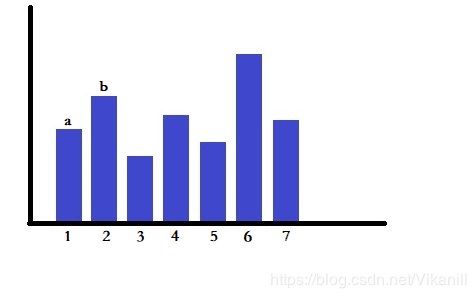
在直方图相关的概念中,bin经常出现,其实bin指的就是直方图中出现的“柱”。比如下图中就有7个bin,“bin=1”可以理解为“柱1”,其存储的值为a。
output = np.bincount(a),a是1维数组,其元素为非负整数。计数数组a中每个元素出现的次数,然后以元素为下标,值为出现次数输出结果。
a = [1,0,0,0,5,3,0,0,1],其中0出现了5次,1出现了2次,3和5都出现了1次,2和4出现了0次。m出现了n次,output [m]=n。
output = [5,2,0,1,0,1]
output = np.bincount(a,weight),当有第二个参数[数组]时,计算的就不再是每个元素出现的次数,而是以b中的元素作为a中对应下标元素的权重,计算a中同一元素的权重之和。
a = [1,0,0,0,5,3,0,0,1]
w = [5,1,3,4,2,1,2,2,3]
a中元素1出现在下标0的位置,那么output[1]+=w[0],1还出现在下标8,output[1]+=w[8]。
output = [12,8,0,1,0,2]
也就是说当只有一个参数时,权重默认都是1。
关于bincount这个函数,这个老哥讲得比较清楚,当然最好还是自己动手试一试。
在python-opencv教程的代码中比较难理解的是这一行。
hists = [np.bincount(b.ravel(), m.ravel(), bin_n) for b, m in zip(bin_cells, mag_cells)]zip函数将bin_cells和mag_cells中的元素一对一对地打包成元组,例如a=[元素a1,元素a2,元素a3],b=[元素b1,元素b2,元素b3],那么zip(a,b)=[(元素a1,元素b1),(元素a2,元素b2),(元素a3,元素b3)]。然后使用for循环提取出其中的每一对,用b,m存储,以便在bincount函数中使用。
bin_cells = bins[:center_row,:center_col],
bins[center_row:,:center_col],
bins[:center_row,center_col:],
bins[center_row:,center_col:]
mag_cells = mag[:center_row,:center_col],
mag[center_row:,:center_col],
mag[:center_row,center_col:],
mag[center_row:,center_col:]可以在上面看到,bin_cells和mag_cells都只有4个元素且都是矩阵。那么for循环中的每一对b,m也是一对矩阵。
使用ravel函数是将二维的b和m扁平化,方便进行遍历,原本n*m的数据变成(n*m)的一维数据。bins中记录的是梯度变化的方向,mag中记录的是梯度值。以方向作为bin,以梯度值为权重,计算bincount。

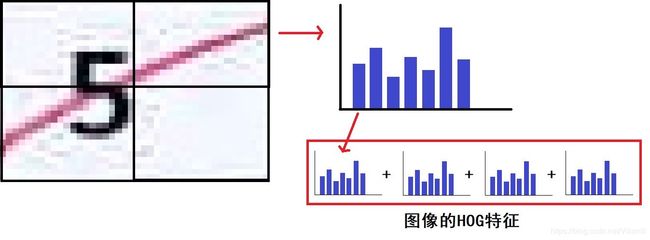
最终hists是一个包含4个元素的数组,这4个元素都是1维数组,每个都至少有16项。因为是都是一维数组,使用hstack相当于将他们拼接成一个数组。
hist = np.hstack(hists)之所以要使用hstack而不是vstack,因为这4个cell每个都作为独立的一部分,使用vstack就相当于将整个图像作为一个cell,前面做的划分等工作也就没意义了。就好比你将语数英综合4门成绩列出来能看出来一个学生擅长什么不擅长什么,而只列出一个总分就只能看到他的总体水平。划分为4个cell是因为样本图像本身大小并不大。划分太小像素点都有些不够用...具体使用多少cell要根据自己的实际情况来决定。
完整代码:
def GetHOGFeature(img_src,show_img=False,show_gradient_img=False,show_gradient_img_isGray=False):
#彩色图像,之后可能会用来显示与原图像的对比
#img_3c = img_src.copy()
#灰度图像
img_1c = cv.cvtColor(img_3c,cv.COLOR_BGR2GRAY)
#这里是自己写的一个“双阈值化+腐蚀”的函数,主要是对图像进行预处理
img_1c = HandleImgByThreshAndErode(img_1c)
img = img_1c.copy()
#GetBinary是获得一个二值化函数
img = GetBinaryImg(img)
#bin_n为梯度直方图至少有多少列
bin_n = 16
#分别在水平和竖直方向使用Sobel进行卷积
gx = cv.Sobel(img, cv.CV_32F, 1, 0)
gy = cv.Sobel(img, cv.CV_32F, 0, 1)
#计算梯度和梯度变化方向
mag, ang = cv.cartToPolar(gx, gy)
#ang为Mat类型
#量化
#cartToPolar默认输出的ang是弧度0到2π
#有符号梯度 将角度的值从[0,2π]映射到[0,16]
#bins = np.int32(bin_n*ang/(2*np.pi))
#无符号梯度,将角度的值从[0,2π]映射到[0,16],但是将a和a+pi看做是一样的
bins = np.int32(bin_n*(ang%np.pi)/(np.pi))
# 每个bins中对应的坐标x都从0到np.size(bins,1) y从0到np.size(bins,0)
# bins(mag)、ang图像划分为4个子矩形
# bin_cells和mag_cell的类型应为Mat数组
center_row = int(img.shape[0]/2)
center_col = int(img.shape[1]/2)
bin_cells = bins[:center_row,:center_col], bins[center_row:,:center_col], bins[:center_row,center_col:], bins[center_row:,center_col:]
mag_cells = mag[:center_row,:center_col], mag[center_row:,:center_col], mag[:center_row,center_col:], mag[center_row:,center_col:]
hists = [np.bincount(b.ravel(), m.ravel(), bin_n) for b, m in zip(bin_cells, mag_cells)]
hist = np.hstack(hists)
#print("HOG特征元素个数")
#print(len(hist))
#保留2位小数方便计算
hist = np.round(hist,2)
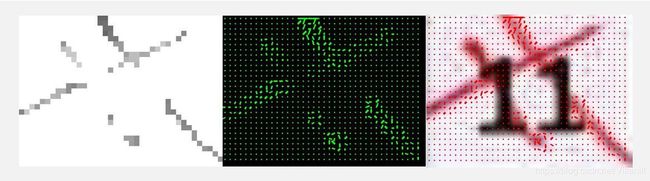
return hist可视化
试着根据计算出来的梯度向量在原图像上绘制了一下。能让效果直观一点。