【OpenCV3】透视变换——cv::getPerspectiveTransform()与cv::warpPerspective()详解
透视变换(Perspective Transformation)是将成像投影到一个新的视平面(Viewing Plane),也称作投影映射(Projective Mapping)。如图1,通过透视变换ABC变换到A'B'C'。
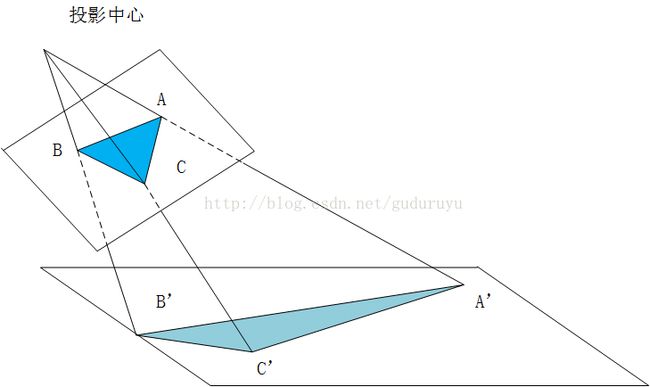
图1 透视变换示意图
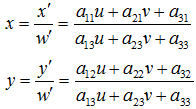
透视变换的通用公式为:

变换后的坐标x,y分别为: 。
。
展开之后即:
其中, 称为透视变换矩阵:
称为透视变换矩阵: 表示线性变换,如scaling,shearing和ratotion等;
表示线性变换,如scaling,shearing和ratotion等;
 用于平移,因此此前介绍的仿射变换可以视作一种特殊的透视变换。
用于平移,因此此前介绍的仿射变换可以视作一种特殊的透视变换。
如图2,我们想将倾斜视角拍摄到的道路图像转换成鸟瞰图,即将摄像机的视角转换到和道路平行。

图2 倾斜视角
首先,我们需要获得此次透视变换的变换矩阵,opencv2和opencv3中用于计算透视变换矩阵的函数是cv::getPerspectiveTransform(),C++接口其调用形式如下:
cv::Mat cv::getPerspectiveTransform( // 返回3x3透视变换矩阵
const cv::Point2f* src, // 源图像四个顶点坐标(点数组)
const cv::Point2f* dst // 目标图像上四个顶点的坐标(点数组)
);如图3 ,我们选取道路上的两条平行分界线上的四个点A(165, 270)、C(360, 125)、D(615, 125)、B(835, 270),对应于鸟瞰图上的点则分别为A(165, 270)、C'(165, 30)、D'(835, 30)、B(835, 270)。

图3 透视变换端点
通过这四对点我们即可计算出透视变换矩阵M。
C++代码如下:
cv::Mat get_perspective_mat()
{
cv::Point2f src_points[] = {
cv::Point2f(165, 270),
cv::Point2f(835, 270),
cv::Point2f(360, 125),
cv::Point2f(615, 125) };
cv::Point2f dst_points[] = {
cv::Point2f(165, 270),
cv::Point2f(835, 270),
cv::Point2f(165, 30),
cv::Point2f(835, 30) };
cv::Mat M = cv::getPerspectiveTransform(src_points, dst_points);
return M;
}Python代码如下:
def get_perspective_mat():
src_points = np.array([[165., 270.], [835., 270.], [360., 125.], [615., 125.]], dtype = "float32")
dst_points = np.array([[165., 270.], [835., 270.], [165., 30.], [835., 30.]], dtype = "float32")
M = cv2.getPerspectiveTransform(src_points, dst_points)
return M计算结果如下:

在获得透视变换矩阵后,即可使用与cv::warpPerspective()进行透视变换,其调用形式如下:
void cv::warpPerspective(
cv::InputArray src, // 输入图像
cv::OutputArray dst, // 输出图像
cv::InputArray M, // 3x3 变换矩阵
cv::Size dsize, // 目标图像大小
int flags = cv::INTER_LINEAR, // 插值方法
int borderMode = cv::BORDER_CONSTANT, // 外推方法
const cv::Scalar& borderValue = cv::Scalar() //常量边界时使用
);C++代码如下:
cv::Mat perspective;
cv::warpPerspective(image, perspective, M, cv::Size(960, 270), cv::INTER_LINEAR);Python代码如下:
perspective = cv2.warpPerspective(image, M, (960, 270), cv2.INTER_LINEAR)变换结果如下:

2017.05.19