高斯混合PHD滤波器 论文脉络梳理(单目标贝叶斯,多目标贝叶斯,PHD,边缘分布多目标贝叶斯)
摘要:在数据关联不确定,检测不确定和噪声的环境下,传感器检测不到所有目标,并且因为杂波的存在,还会出现虚假测量。为了联合估计时变目标数及其状态,传统的方法是将目标和观测进行精确的关联。比如:NN,MHT,JPDA,PMHT等。但由于组合性质,其计算量很大。而现在的解决方法是对称测量方程(symmetric measurement equations)和随机有限集RFS(random finit sets)。RFS主要将目标和观测分别作为一个随机有限集,再利用线性高斯模型来求得PHD递归方程的解,从而得到其后验强度。最后,论文使用扩展卡尔曼滤波器 EK filters(the extended Kalman filters)和无迹卡尔曼滤波器 UK filters(the unscented Kalman filters)将算法拓展到非线性目标运动。
本篇博客将分为四部分来讲解。第一部分为问题制定;第二部分为线性高斯模型的PHD递推;第三部分非线性高斯模型的PHD递推;第四部分为总结与展望。
一、提出问题
这部分提出了一个问题,在由单目标贝叶斯滤波器到多目标贝叶斯滤波器再到PHD滤波器的推理中,最后,如何解决PHD递归方程无封闭解的问题,即:数值积分有维数之灾。
1. 单目标贝叶斯滤波器
![]() 转移概率密度:
转移概率密度:![]()
![]() 似然函数:
似然函数:![]()
![]() 后验概率密度:
后验概率密度: ![]()
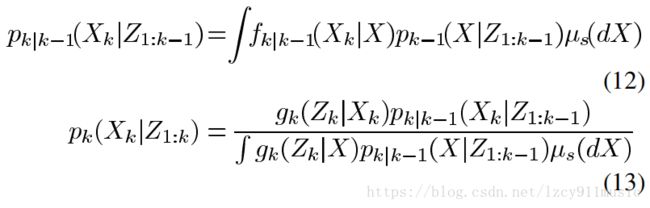
单目标贝叶斯递归方程:
k时刻先验密度:

k时刻后验密度:

k时刻目标状态获得方法:一是最小均方误差MMSE(the minimum mean squared error criterion),二是最大后验准则MAP(the maximum a posteriori criterion)
2.基于RFS的多目标贝叶斯滤波器
状态集:![]()
观测集:![]()
其中,![]() 为k时刻目标个数,
为k时刻目标个数,![]() 为k时刻接收到的观测数目。
为k时刻接收到的观测数目。![]() 分别是状态空间X和观测空间Z的子集。这两个集合中的元素是无序的。
分别是状态空间X和观测空间Z的子集。这两个集合中的元素是无序的。
状态集具体包括存活目标数,衍生目标数和新生目标数,公式具体如下:

其中:![]() 表示存活,
表示存活,![]() 表示衍生,
表示衍生,![]() 表示新生。
表示新生。
观测集具体包括目标和杂波产生的观测,公式具体如下:

其中:![]() 为接收到的虚假测量,
为接收到的虚假测量,![]() 目标产生的测量。
目标产生的测量。
基于RFS的最优多目标贝叶斯滤波器递推公式:
缺点:递推公式涉及多重积分,计算量大,适用于目标数较少的多目标跟踪。
3.PHD滤波器----解决多目标贝叶斯滤波器计算困难问题
在杂波所产生的观测集![]() ,新生状态集
,新生状态集![]() 和衍生状态集
和衍生状态集![]() 为Poisson RFSs的前提条件下,作如下假设。
为Poisson RFSs的前提条件下,作如下假设。
A.1:Each target evolves and generates observatiions independently of one another.
A.2:Clutter is Poisson and independent of target-originated measurements.
A.3:The predicted multi-target RFS governed by ![]() is Poisson.
is Poisson.
则有PHD递推方程
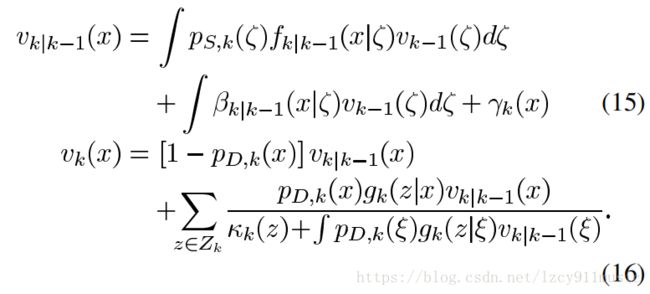
其中: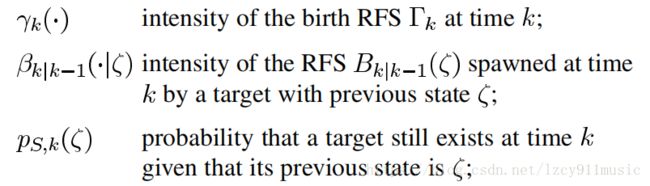

缺点:通常无封闭形式解,数值积分有维数之灾。
4.边缘分布多目标贝叶斯(MDMB)
边缘分布多目标贝叶斯滤波器联合传递每个目标的边缘分布和它们的存在概率,存在概率表征目标出现和消失的随机性。该滤波器的推导分为预测和更新两部分,其处理对象为单目标。
预测歩:

![]()
其中,![]() 表示在t-1时刻有K个目标,
表示在t-1时刻有K个目标,![]() 为目标的存在概率。
为目标的存在概率。
为了使滤波器能跟踪新生和衍生目标,我们对滤波器的预测分布进行扩展,如下:
相应的存在概率为:
其中,![]() 表示新生分布数,
表示新生分布数,![]() 表示衍生分布数。
表示衍生分布数。
综合上述情况,扩展的预测分布为:

更新歩:

![]()

在更新步骤中,对于一个预测分布可以产生M个更新分布,将这M个分布组合成一个分布,如下:

其中,归一化系数C为:
存在概率为:

上述分布的存在条件为目标能被检测,如果考虑漏检的情况,那么其更新步骤就用预测步骤来维持:

![]()
综上可以的更新歩为:


二、线性高斯模型的PHD递推
由于PHD递推方程无封闭形式解,所以引用线性高斯模型,使之有解析解,从而进行更高效的多目标跟踪。
1. 线性高斯多目标模型的建立
在前面3点假设基础上,再提出3点假设,构建线性高斯多目标模型。
A.4:

其中:![]() 表示均值为m,协方差为P的高斯密度,
表示均值为m,协方差为P的高斯密度,![]() 为状态转移矩阵,
为状态转移矩阵,![]() 为过程噪声协方差,
为过程噪声协方差, 为观测矩阵,
为观测矩阵, 为观测噪声协方差。
为观测噪声协方差。
A.5: 假设存活概率和检测与其状态无关:

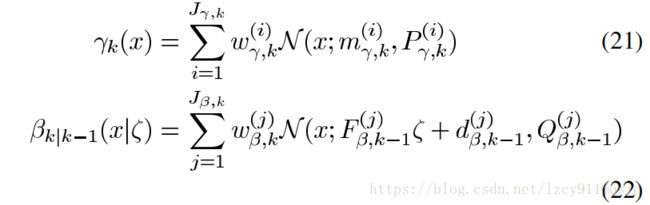
A.6: 假设新生和衍生RFSs强度为高斯混合形式:
其中:
都是给定的参数。
2. 高斯混合PHD递推
在A.4--A.6成立条件下,通过以下两个命题,给出PHD递推的封闭解。
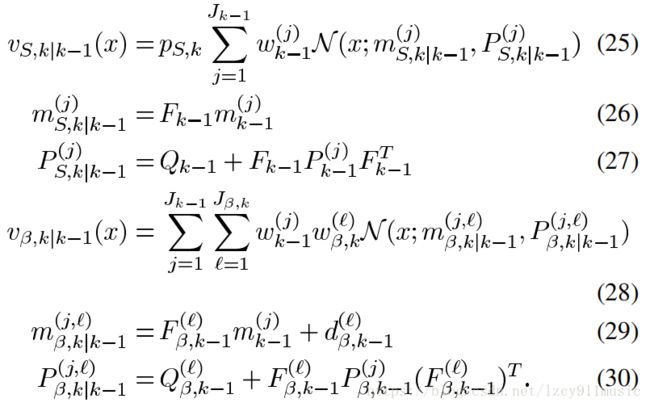
命题1:先假设k-1时刻的后验强度为高斯混合形式

则k时刻的先验强度为
![]()
其中------
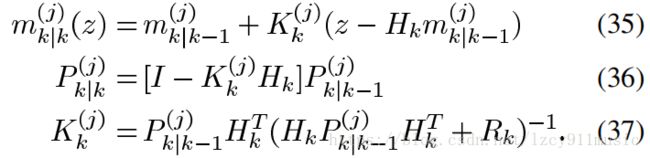
命题2:假设k时刻先验强度为高斯混合形式

则k时刻后验强度也为高斯混合形式

其中------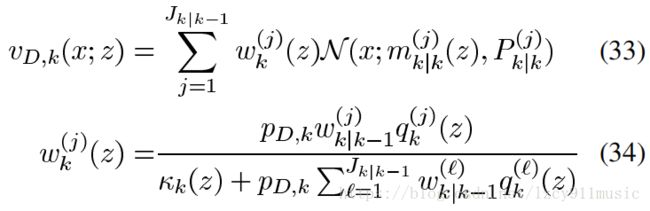
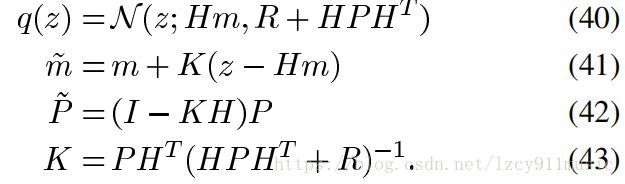
公式推理中两个重要的高斯函数
(1)

(2)
![]()
其中:
推论:由命题1和命题2可得,目标在K时刻的预测目标数的平均值和更新目标数的平均值分别如下所示。


3. 实施具体细节
(1)高斯分量随时间计算量会增大
解决方法:剪枝(pruning),一方面裁剪弱权值分量,另一方面合并近似分量。
(2)如何从后验强度提取多目标状态估计
选取权重比某些阈值大的高斯均值作为状态。
4. 仿真结果
本文通过两个仿真实例来测试所提出的高斯混合PHD滤波器。先给定所有参数具体数值,第一个例子主要测试存活和衍生目标,结果显示,跟踪效果很好。第二个例子主要是和JPDA滤波器作比较,因为JPDA跟踪已知且固定的目标数,所以,这里不考虑衍生的情况,利用CPEP和期望绝对误差来评价跟踪效果(杂波浓度和检测概率作为因变量)。
结果表明:JPDA滤波器不收检测概率的影响,两个滤波器在各种各样的杂波率中其CPEP很接近。
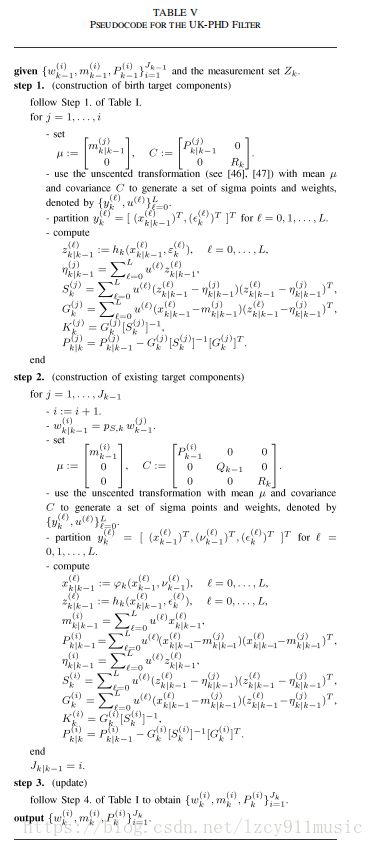
三、非线性高斯模型的PHD递推
假设A.5和A.6成立,扩展到非线性情况,可利用 EK filter或 UK filter。其具体推理步骤见下表。

四、总结与展望
这篇文章主要利用线性高斯混合模型来解析PHD递归方程的封闭形式解,之后再将其扩展到非线性运动模型中(利用EK filter或 UK filter),对于随时间增长的高斯分量,采用剪枝方法。未来的研究方向可能是PHD递归的封闭形式解运用到跳变马尔科夫模型中并且也会探讨非线性和非高斯的情况。
此篇文章是对《The Gaussian Mixture Probability Hypothesis Density Filter》的脉络梳理,详情请参考原文。