深度可分离卷积
下面这个文章介绍了深度可分离卷积是怎么做的:
https://towardsdatascience.com/a-basic-introduction-to-separable-convolutions-b99ec3102728
https://eli.thegreenplace.net/2018/depthwise-separable-convolutions-for-machine-learning/
本文的很多内容都是在这两个文章的基础上整理的。
卷积基础
描述一个二维矩阵,使用row col。三维的,使用channel row col。四维则多了一个参数:batch channel row col。batch channel row col的逻辑顺序则和数据格式有关,常见的有NHWC和NCHW:https://mp.weixin.qq.com/s/I4Q1Bv7yecqYXUra49o7tw?
2D卷积
2D卷积只有col row的概念。(略)
3D卷积和4D卷积
我们先看3D卷积。
假设过滤器窗口是3x3x3(其中一个3代表了in_depth)。有四个这样的窗口,用于提取同一个图片的四个属性(out_depth 0…3指定,对应输出Out channel 0…3)。那么,针对图片里面的某个Batch(譬如Batch 0),四个过滤器窗口的处理流程如下(请注意:四个过滤器,操作的都是同一组数据,即都是Batch 0):
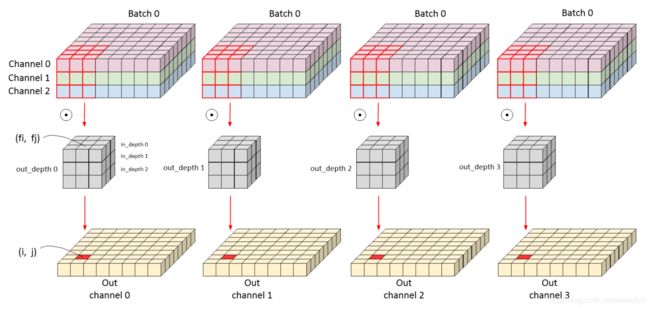
参考的源码实现里面,i,j代表了输出的某个属性的任意位置的值。这个值,是窗口和输入卷积得来的。
参考的源代码(Copy 自引文):
def conv2d_multi_channel(input, w):
"""Two-dimensional convolution with multiple channels.
Uses SAME padding with 0s, a stride of 1 and no dilation.
input: input array with shape (height, width, in_depth)
w: filter array with shape (fd, fd, in_depth, out_depth) with odd fd.
in_depth is the number of input channels, and has the be the same as
input's in_depth; out_depth is the number of output channels.
Returns a result with shape (height, width, out_depth).
"""
assert w.shape[0] == w.shape[1] and w.shape[0] % 2 == 1
padw = w.shape[0] // 2
padded_input = np.pad(input,
pad_width=((padw, padw), (padw, padw), (0, 0)),
mode='constant',
constant_values=0)
height, width, in_depth = input.shape
assert in_depth == w.shape[2]
out_depth = w.shape[3]
output = np.zeros((height, width, out_depth))
for out_c in range(out_depth):
# For each output channel, perform 2d convolution summed across all
# input channels.
for i in range(height):
for j in range(width):
# Now the inner loop also works across all input channels.
# 卷积操作是用窗口和输入的所有通道做乘加运算。
for c in range(in_depth):
#下面这段应该封装为一个新的函数:用于求解输出的某个属性的卷积。
for fi in range(w.shape[0]):
for fj in range(w.shape[1]):
w_element = w[fi, fj, c, out_c]
output[i, j, out_c] += (
padded_input[i + fi, j + fj, c] * w_element)
return output
所谓4D,就是对每个Batch重复上面的过程。
参考文献:
https://eli.thegreenplace.net/2018/depthwise-separable-convolutions-for-machine-learning/
正常卷积
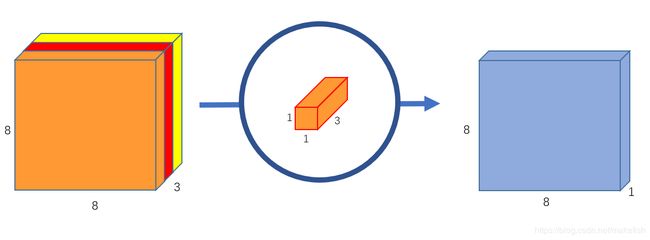
原始图像是二维的,大小是12x12。由于是RGB格式的,所以有三个通道,这相当于是一个3维的图片。其输入图片格式是:12x12x3。滤波器窗口大小是5x5x3。这样的话,得到的输出图像大小是8x8x1(padding模式是valid)。
12x12x3 * 5x5x3 => 8x8x1
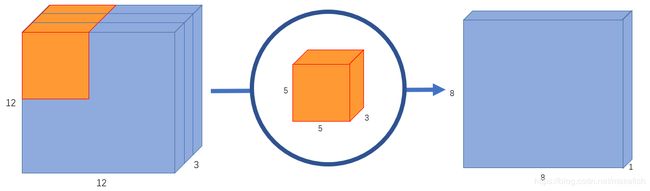
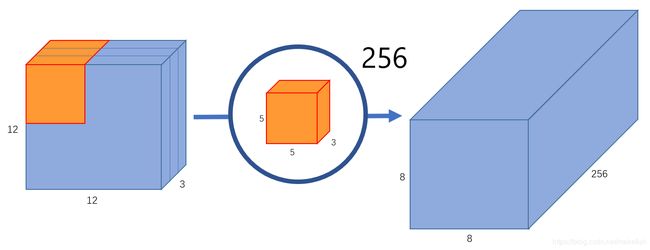
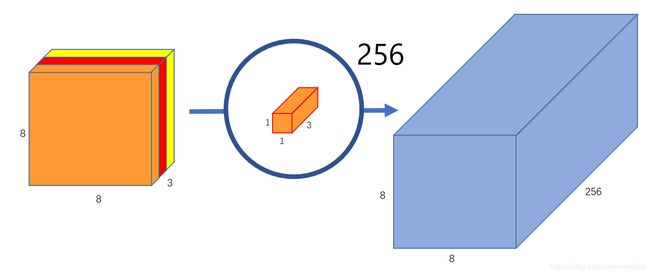
一个5x5x3滤波器得到的输出图像8x8x1,仅仅提取到的图片里面的一个属性。如果希望获取图片更多的属性,譬如要提取256个属性,则需要:
12x12x3 * 5x5x3x256 => 8x8x256
如下图(图片引用自原网站。感觉应该将8x8x256那个立方体绘制成256个8x8x1,因为他们不是一体的,代表了256个属性):
正常卷积的问题在于,它的卷积核是针对图片的所有通道设计的(通道的总数就是depth)。那么,每要求增加检测图片的一个属性,卷积核就要增加一个。所以正常卷积,卷积参数的总数=属性的总数x卷积核的大小。
深度可分离卷积
深度可分离卷积的方法有所不同。正常卷积核是对3个通道同时做卷积。也就是说,3个通道,在一次卷积后,输出一个数。
深度可分离卷积分为两步:
- 第一步用三个卷积对三个通道分别做卷积,这样在一次卷积后,输出3个数。
- 这输出的三个数,再通过一个1x1x3的卷积核(pointwise核),得到一个数。
所以深度可分离卷积其实是通过两次卷积实现的。
第一步,对三个通道分别做卷积,输出三个通道的属性:
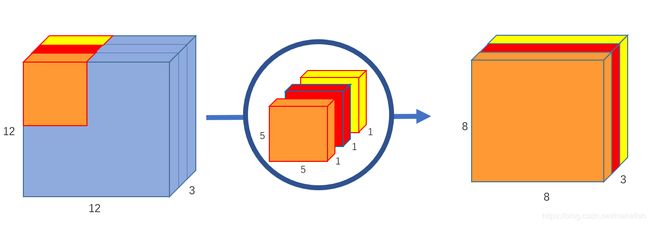
第二步,用卷积核1x1x3对三个通道再次做卷积,这个时候的输出就和正常卷积一样,是8x8x1:
如果要提取更多的属性,则需要设计更多的1x1x3卷积核心就可以(图片引用自原网站。感觉应该将8x8x256那个立方体绘制成256个8x8x1,因为他们不是一体的,代表了256个属性)::
可以看到,如果仅仅是提取一个属性,深度可分离卷积的方法,不如正常卷积。随着要提取的属性越来越多,深度可分离卷积就能够节省更多的参数。
证明过程
有一篇文章证明了深度可分离卷积和正常卷积是等效的(如果有需要的话,我再整理):
https://arxiv.org/abs/1808.05517
https://arxiv.org/abs/1610.02357