2月21日 CVST工具箱模块仿真与图像处理(一)
课程地址:http://www.auto-mooc.com/chapter/study?class_id=C588FF7748E30CAB8B2C26AC901466C4&item_id=A26FBD880AF9AEB250A23688B1B471F4
CVST工具箱
matlab
结构
Simulink
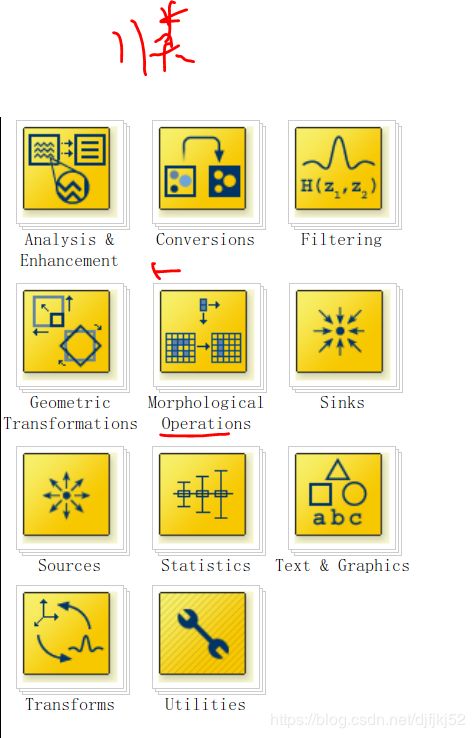
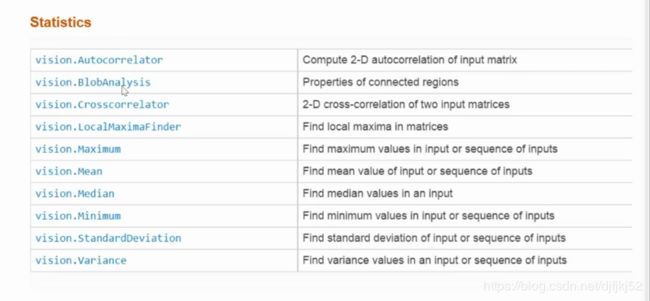
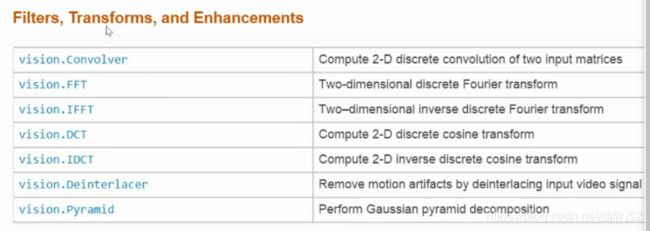
CVST一个11类工具
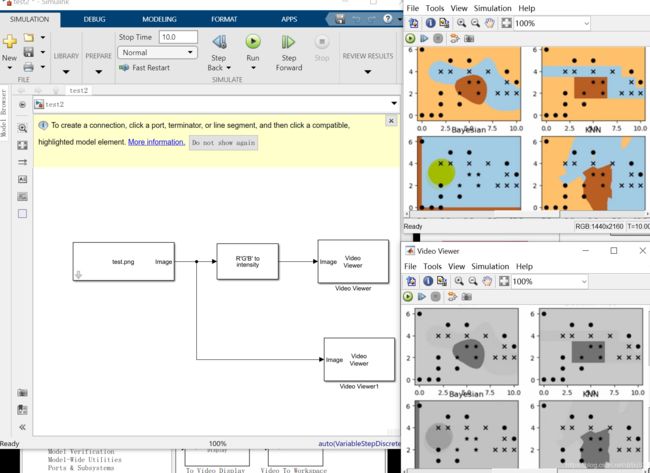
demo1:RGB的灰度仿真
图片灰度
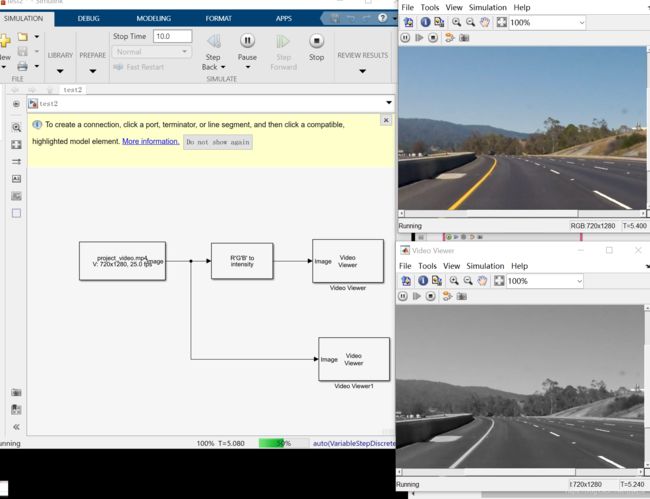
视频灰度
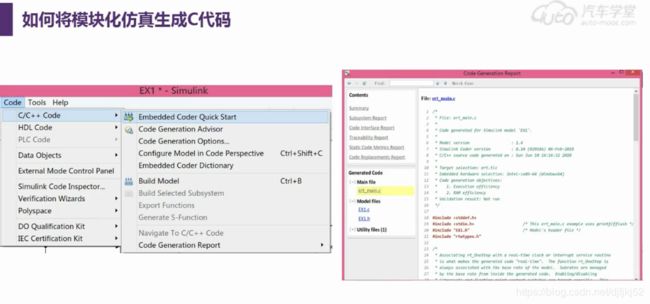
导出代码
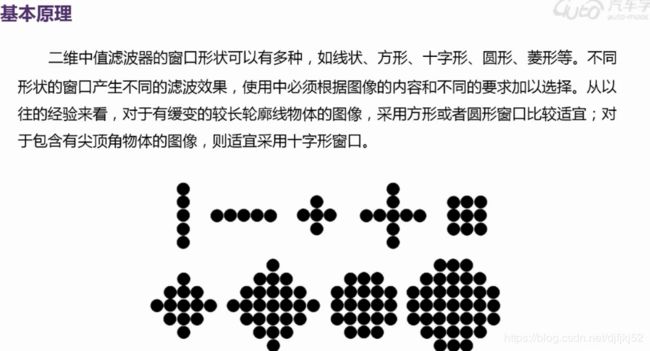
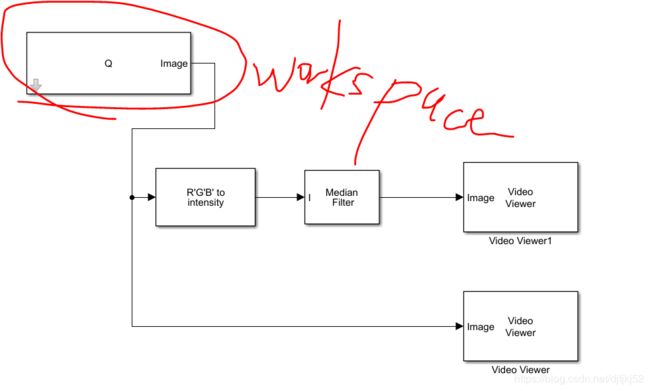
demo2 图像中值滤波
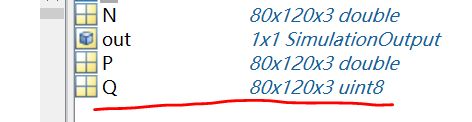
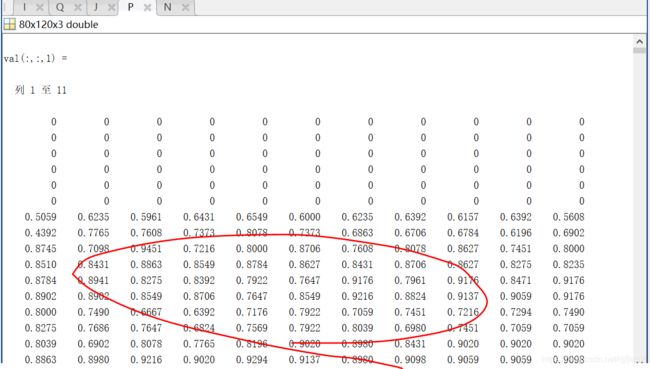
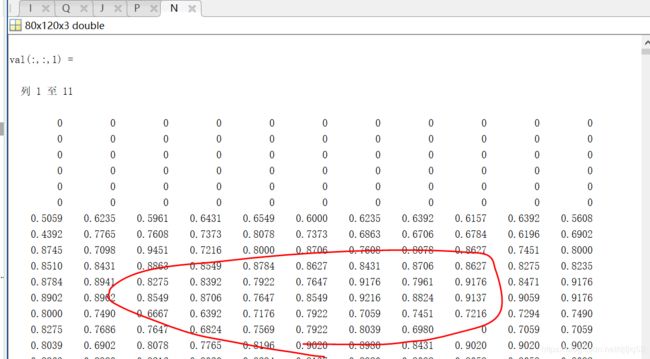
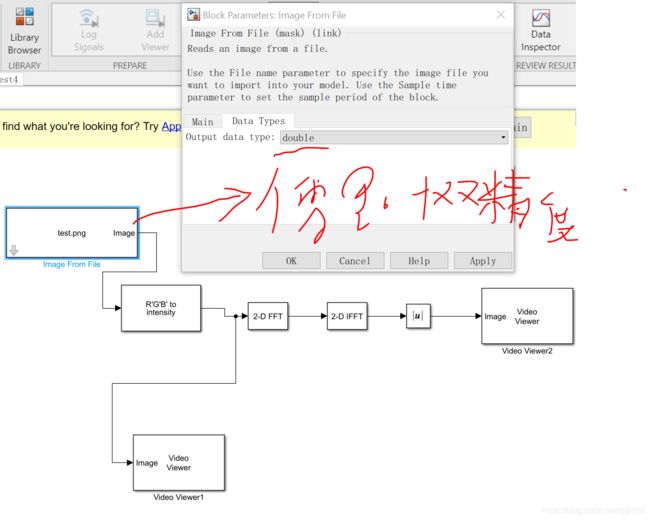
异常处理1:图像uint9——double的问题
现象:
I=double(imread("test.png"));
J=imnoise(I,"salt & pepper",0.02);
Q=imread("test.png");
P=im2double(imread("test.png"));
N=imnoise(P,"salt & pepper",0.02);
Matlab图像处理中uint8和double的问题
参考:https://blog.csdn.net/SMF0504/article/details/72899725
为了节省存储空间,matlab为图像提供了特殊的数据类型uint8(8位无符号整数),以此方式存储的图像称作8位图像。
imread把灰度图像存入一个8位矩阵,当为RGB图像时,就存入8位RGB矩阵中。
因此,matlab读入图像的数据是uint8,而matlab中数值一般采用double型(64位)存储和运算。所以要先将图像转为double格式的才能运算,
I2=im2double(I1) %把图像I1转换成double精度类型 (假设图形矩阵范围0~255)
或者
I64=double(I8)/255; %uint转换成double
如果不转换,计算会产生溢出。
意思也就是显示的时候用uint8 运算的时候用double;
即,主要是为了保持运算精度, 一般来说用double 来完成复杂的运算。而在存储的时候的一般存储为uint8类型,节省存储空间。
im2double():将图象数组转换成double精度类型
im2uint8():将图象数组转换成unit8类型
im2uint16():将图象数组转换成unit16类型
因为uint8的图像是灰度图像,也就是 像素值是从0~ 255变化的,而转换为double后像素值成了0~1变化,也就是说0是黑色,1是白色
使用”double(imread(”test.png“))会有错误
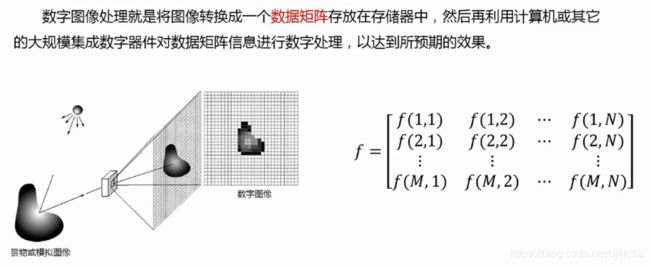
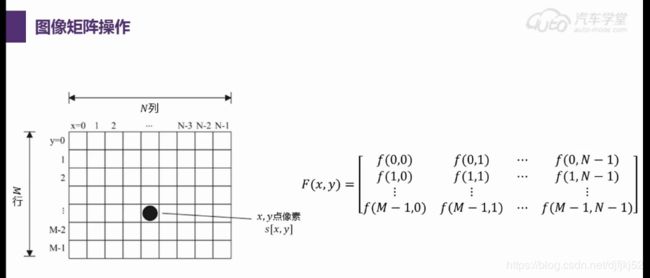
数字图像处理
学习主线
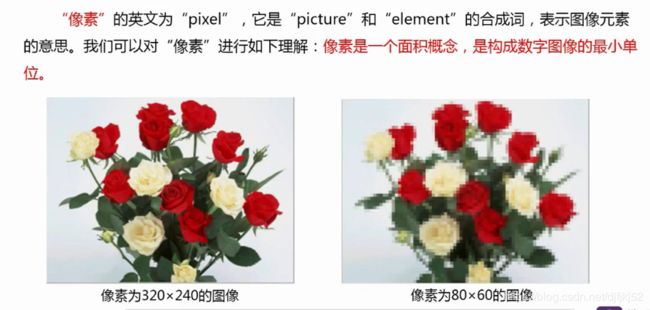
像素
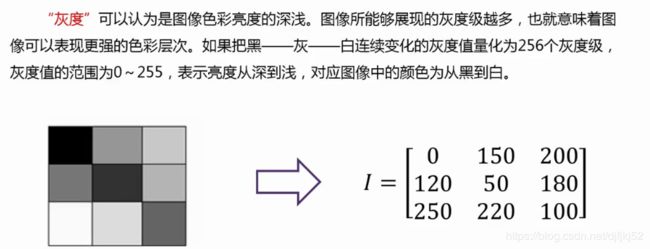
灰度

典型图像变换的方法及仿真,如平移变换、图像的傅里叶变换等。
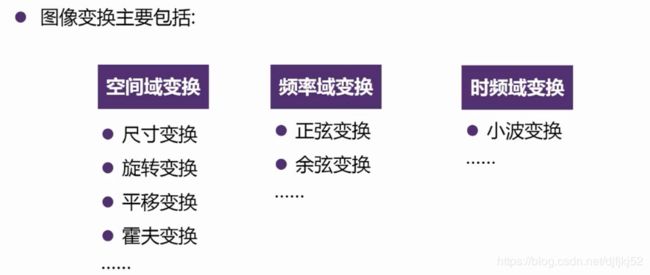
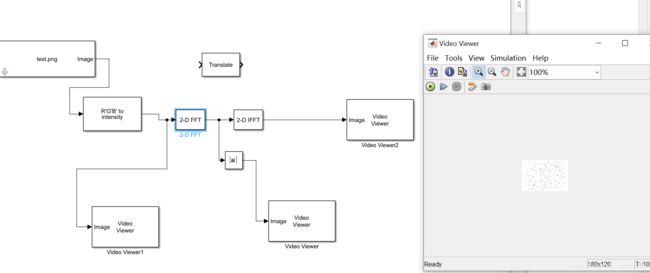
平移变换
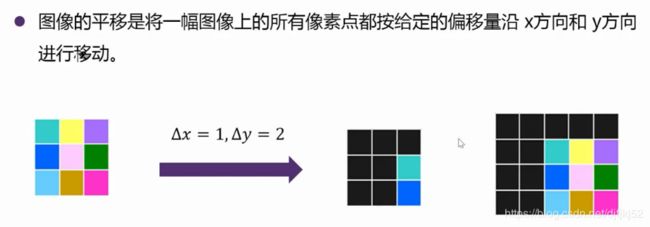
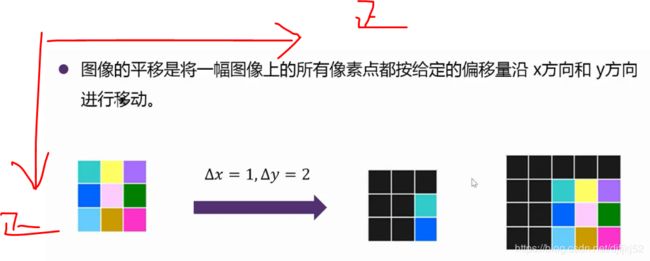
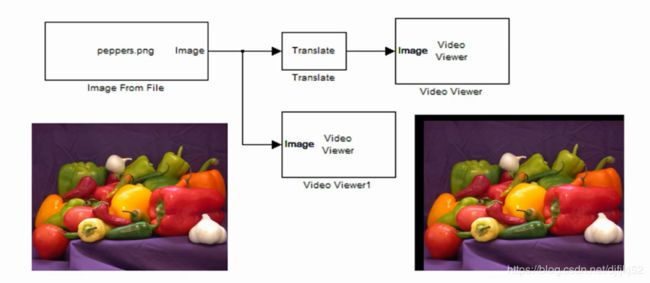
demo:平移
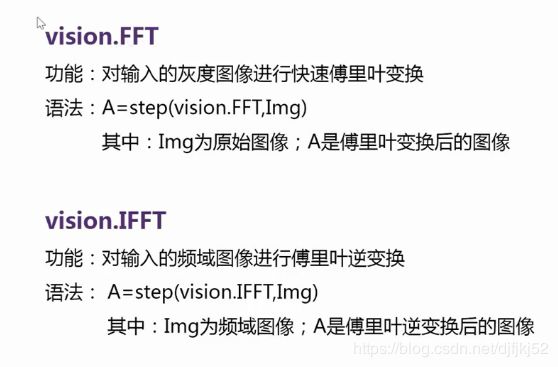
时频域变换:傅里叶变换
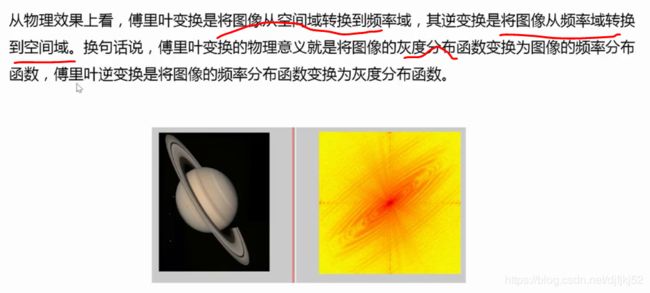
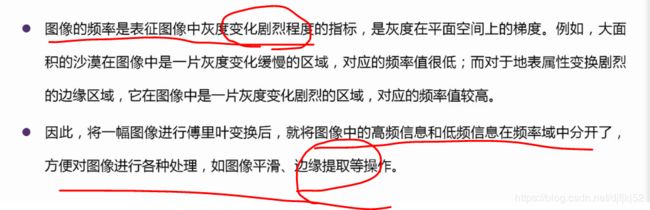
demo:傅里叶变换
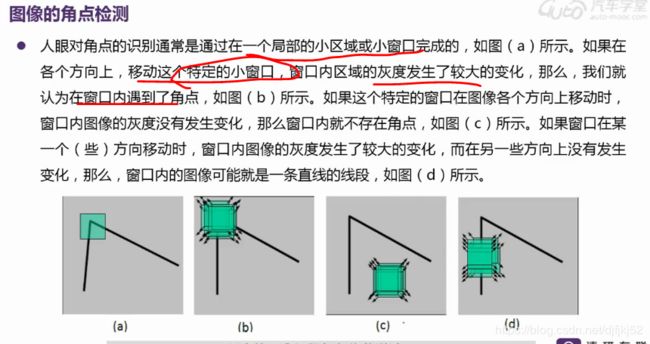
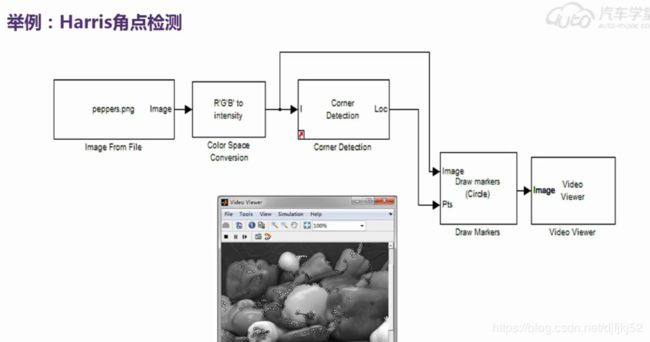
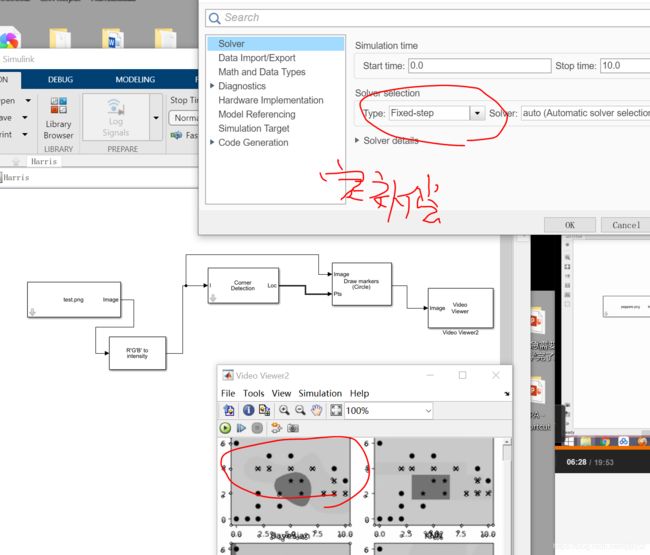
典型特征提取方法及模块儿化仿真,如Harris角点检测、图像边缘检测、尺度不变特征等。
demo 边缘检测
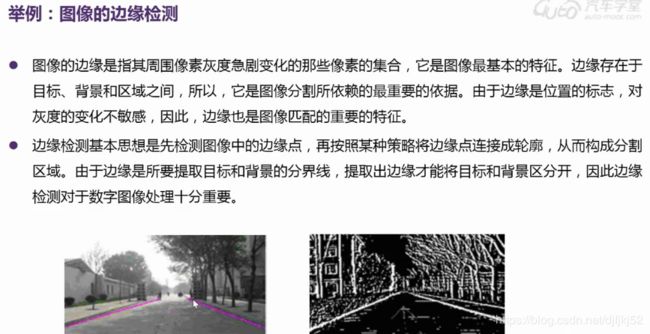
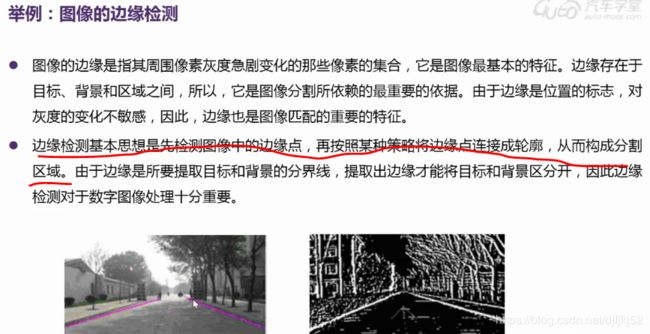
边缘可以分成两种
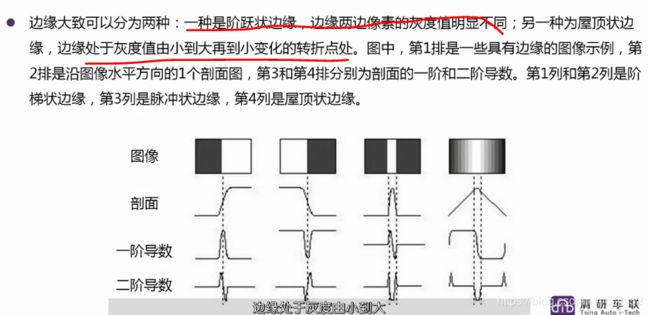
很多图像检测就是将图像矩阵求解一阶、二阶导数,根据导数变化以及变化的方向,例如sobel算子,prewitt算子,canny算子,基本原理相似

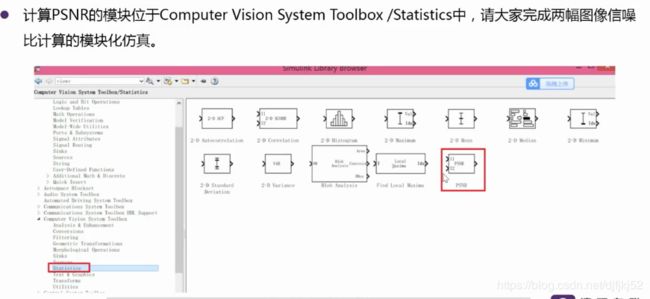
图像信噪比计算的模块化仿真
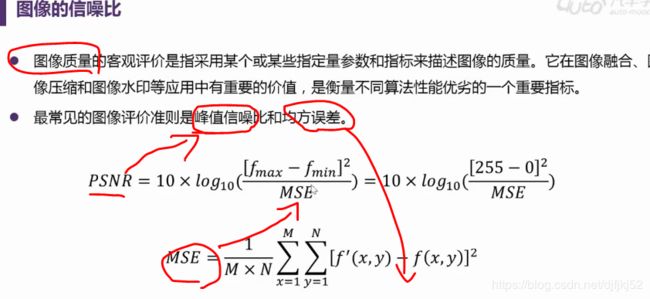
demo 信噪比
项目:离散余弦变换
离散余弦变换是与傅里叶变换相关的一种变换,类似于离散傅里叶变换,但是只使用实数。离散余弦变换相当于一个长度大概是它两倍的离散傅里叶变换,这个离散傅里叶变换是对一个实偶函数进行的,在有些变形里面需要将输入或者输出的位置移动半个单位。—— 维基百科
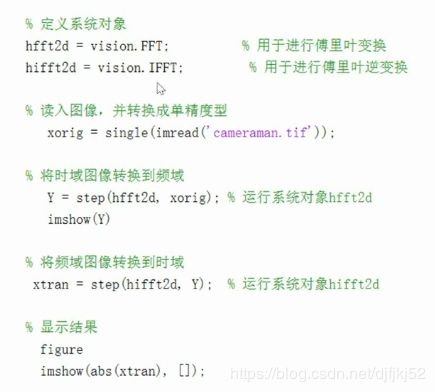
傅里叶变换——傅里叶逆变换,对图像无影响
DCT变换,DCT又称离散余弦变换,是一种块变换方式,只使用余弦函数来表达信号,与傅里叶变换紧密相关。常用于图像数据的压缩,通过将图像分成大小相等(一般为8*8)的块,利用DCT对其进行变换,得到更加简洁的数据。因为图像像素间存在较大的空间相关性,DCT可以大大减小这些相关性,使图像能量集中在左上角区域,从而利于数据压缩。变换后得到的数据称为DCT系数。这一过程是无损的 。
————————————————
版权声明:本文为CSDN博主「彼岸之音」的原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/ahafg/article/details/48808443
1974年,K. R. Rao、N. Ahmed、T. Natarajan三位教授创立了离散余弦变换(Discrete Cosine Transform, DCT)。在数字信号、数字图像处理领域,离散余弦变换的效果能够接近理论上的最佳变换——Kahunen-Loeve变换(K-L变换)。
1807年,法国数学家、物理学家傅里叶(Jean Baptiste Joseph Fourier)提出了傅里叶变换(Fourier Transform, FT)。傅里叶变换的形式有很多种,归一化的二维离散傅里叶变换(Discrete Fourier transform, DFT)可以写成如下形式:


傅里叶变换包含复数运算,其运算复杂度和存储长度都超过实数运算。为了简化上述过程,同时达到更好的变换效果,余弦变换应运而生。
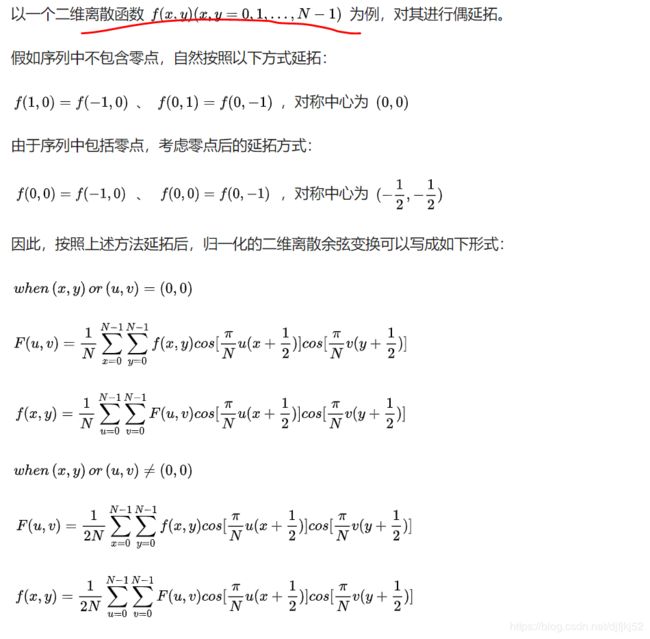
从傅里叶变换到离散余弦变换,需要一些数学理论的支持。在给定区间内满足狄利赫里条件的连续实对称函数,可以展开成仅含有余弦项的傅里叶级数。
对于定义在正实数域上的函数,可以通过偶延拓或奇延拓,满足上述条件。但如果函数的定义域包含零点 ,情况则稍有些复杂。
cite:https://zhuanlan.zhihu.com/p/33845296
DCT在算法层面的实现
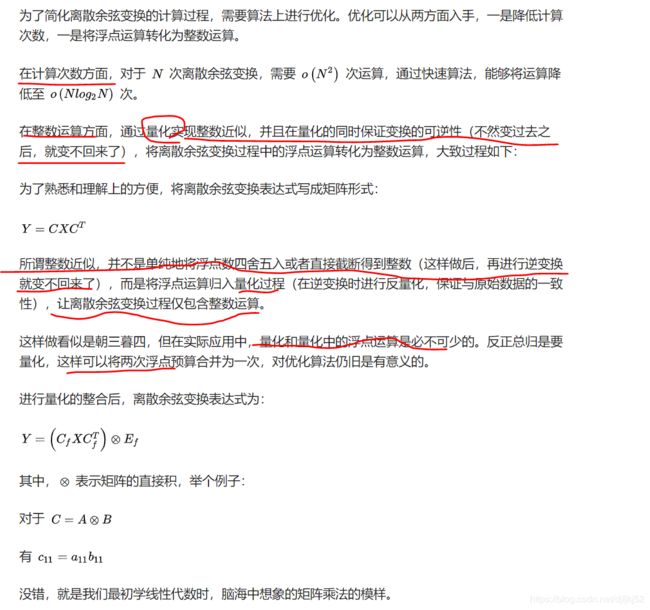
为了简化离散余弦变换的计算过程,需要算法上进行优化。优化可以从两方面入手,一是降低计算次数,一是将浮点运算转化为整数运算。
为什么二维变换可以用矩阵表示
首先回顾一下什么样的图像可以使用 T = A F A T T=AFA^T T=AFAT来进行表示,要求二维变换核同时具备可分性与对称性且图像是正方形的图。当满足上述条件式,一个二维变换可以用两个一维变换计算,即首先变换图像的每一列再变换图像的每一行。对每一列进行变换就是用矩阵乘以图像的每一列,有线性代数知识可知
X F = X [ f 1 , f 2 , f 3 , … , f n ] XF=X[f_1,f_2,f_3,…,f_n] XF=X[f1,f2,f3,…,fn]
其中的F是图像矩阵,而 f 1 , f 2 , f 3 , … , f n f_1,f_2,f_3,…,f_n f1,f2,f3,…,fn 是图像矩阵中的每一列。
————————————————
版权声明:本文为CSDN博主「独孤呆博」的原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/dugudaibo/article/details/78410570
DCT在硬件层面的实现
我们先不谈DSP等专用芯片,单说CPU与GPU。
计算机的运算可以分为两类,整数运算和浮点运算;浮点运算又可以分为两类,单精度浮点运算和双精度浮点运算。
GPU拥有大量并行流处理器,但缺少串行逻辑控制机构,擅长进行浮点预算,对于更注重溢出检查的整数运算,反而是GPU的弱项;CPU作为中央处理器,则是两种运算通吃。
进一步考虑浮点运算,单精度浮点运算的复杂度低于双精度浮点运算。市面上常见的游戏显卡和TaiTan X,均是注重单精度浮点运算,而限制了双精度浮点运算。开普勒架构的游戏显卡,双精度浮点运算能力是单精度浮点运算的1/24;同时代的CPU,这一比值大约是1/2。
一般而言,对于物理建模与模拟(比如流体力学模拟、量子化学计算)、3D建模(其实也是一种意义上的物理建模),需要双精度浮点运算;对于一般的图形渲染(包括游戏渲染、视频渲染)、机器学习,需要单精度浮点运算。所以游戏显卡削弱双精度浮点运算,TaiTan X一个劲提升单精度浮点运算,以及1080Ti被视为平民机器学习神器,都是有其道理的。
回到离散余弦变换。的确,GPU的并行运算速度超过CPU。经过优化的整数离散余弦变换算法利于并行计算,更是突出了GPU的并行优势,但GPU并不擅长整数运算。此外,在实际应用中,离散余弦变换过程伴随着串行逻辑,这也GPU不能胜任的。随着GPU计算的火热,如何让GPU完成离散余弦变换成了学界热点。但目前来看,让CPU扮演主要角色,把一部分运算交给GPU实现加速,应当是比较现实的考虑。
DCT在应用层面的实现
以视频编码为例。1984年,H.261编码标准开始研究。1990年,H.261编码标准由国际电信联盟(ITU-T)发布。1993年,MPEG-1编码标准由国际标准化组织/国际电子学委员会(ISO/IEC)发布。自此,H.26X系列与MPEG-X系列开始了各自的更新换代,当然期间也有合作交易,比如大家可能比较熟悉的MPEG-2与大家可能不熟悉的H.262,其实是一个东西,又比如MPEG-4,包括了(早期的)MPEG-4、MPEG-4/AVC(=H.264)、MPEG-4/HEVC(=H.265)三个标准。
诶,好像就差H.263与MPEG-3没有提。前者随着技术的进步退出了历史舞台,后者则被毙掉了…
从H.261开始,离散余弦变换就被应用于视频编码中。当技术发展到H.264与H.265,就具体的数学计算而言,H.261创立的分块编码被后续标准沿用,H.264在亮度平面上的基本分块为8x8像素块,于是离散余弦变换是这个样子(代入N=8):
在整个编码过程中,离散余弦变换的作用如下:
首先,按照图像处理的一般流程,进行采样、整量,完成连续数据到离散数据的量化。根据前面提到的算法优化,量化过程整合了离散余弦变换的浮点运算。
接下来,进行整数离散余弦变换。做这一变换有什么用?一方面,从图像处理的整体流程而言,变换后便于后续处理;另一方面,从编码的角度而言,变换后使图像信息集中,在数学上体现为描述关键信息的系数变少,相应的,所需存储空间降低,达到降低视频体积的目的。
实现代码:
clear;
clc;
I = [12,23,53,16;42,16,68,45;34,62,73,26;72,15,34,28]; %数据块
A = zeros(4); %变换矩阵A,也可以通过函数dctmtx(n)求得
for i = 0:3
for j = 0:3
if i == 0
a = sqrt(1/4);
else
a = sqrt(2/4);
end
A(i+1,j+1) = a*cos((j+0.5)*pi*i/4)
end
end
D = A*I*A'; %DCT变换
D1 = dct2(I); %matlab DCT函数进行DCT变换
D2 = A'*D*A; %DCT逆变换

由结果可以看出,D,D1方式得到的DCT系数相同,说明矩阵形式的DCT变换公式是正确的,D2的数据与原数据I相同,实现了数据恢复。
另外通过运行函数dctmtx(4)可以发现得到的变换矩阵与A完全相同。
Matlab 函数实现
matlab实现离散余弦变换有两种方法:
- 一种为函数dct2( ), 使用函数dct2,该函数用一个基于FFT的算法来提高当输入较大的方阵时的计算速度。
- 另一种为函数dctmtx( ), 使用由dctmtx函数返回的DCT变换矩阵,这种方法较适合于较小的输入方阵(例如8×8或16×16)。
————————————————
版权声明:本文为CSDN博主「彼岸之音」的原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/ahafg/article/details/48808443
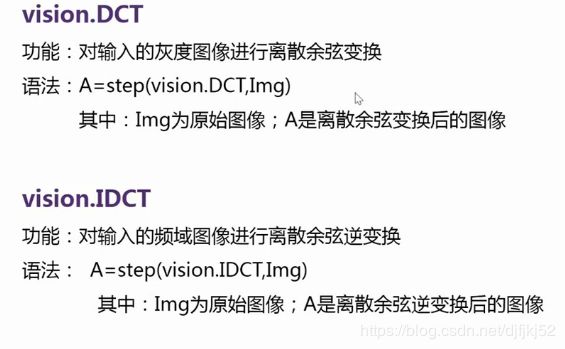
- 函数:dct2( )
实现图像的二维离散余弦变换。调用格式为:
B = dct2(A)
B = dct2(A,[M N])
B = dct2(A,M,N)
式中A表示要变换的图像,M和N是可选参数,表示填充后的图像矩阵大小,B表示变换后得到的图像矩阵。其逆变换函数为idct2( );
代码如下:
I = imread('1_1.jpg');%输入灰度图像
D = dct2(I); %DCT变换
D1 = idct2(D); %逆变换
subplot(1,2,1);imshow(I);
subplot(1,2,2);imshow(uint8(D1));
在这里可以通过函数colormap查看变换系数D。利用不同灰度值,可以发现D中主要数据都分布在左上角。
imshow(log(abs(D)),[]);
colormap(gray(8));colorbar;
- 函数:dctmtx( )
D = dctmtx(N)
式中D是返回N×N的DCT变换矩阵,如果矩阵A是N×N方阵,则A的DCT变换可用D×A×D’来计算。这在有时比dct2计算快,特别是对于A很大的情况。上面有提到过。
对于图像的DCT变换,这里还需用到一个函数blkproc( ),其功能为对图像分块进行DCT变换。
blkproc( )定义如下:
B = blkproc(A,[M N],Fun) ,A为输入图像,MN为块大小,Fun为处理函数
常用的方式为:
B = blkproc(A,[8,8],’P1xP2’,T,T’); T为变换矩阵,P1和P2为参数,代表Tx*T’ 。
%%灰度处理
close all;
clear all;
Img=imread('t2.png');
[n m a]=size(Img);%判断图像的大小
GrayImage= rgb2gray(Img);%调用MATLAB函数实现灰度化
% Img_Gray=zeros(n,m);
% for x=1:n%通过双循环对图像进行灰度化处理
% for y=1:m
% % Img_Gray(x,y)=max(Img(x,y,1),max(Img(x,y,2),Img(x,y,3))); %第一种方法实现灰度化
% % Img_Gray(x,y)=(Img(x,y,1)+Img(x,y,2)+Img(x,y,3))/3;%第二种方法实现灰度化
% Img_Gray(x,y)=0.3*Img(x,y,1)+0.59*Img(x,y,2)+0.11*Img(x,y,3);%第三种方法实现灰度化
% end
% end
%figure,imshow(Img);title('原图像')
%figure,imshow(GrayImage);title('调用系统函数实现灰度化')
%figure,imshow(uint8(Img_Gray));title('第三种方法')
%%图像double-float
I = im2double(GrayImage);
D = dctmtx(8);
C = blkproc(I,[8,8],'P1*x*P2',D,D'); %D'为D的转置
mask1=[1 1 1 1 1 0 0 0
1 1 1 1 0 0 0 0
1 1 1 0 0 0 0 0
1 1 0 0 0 0 0 0
1 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0];
mask2=[1 1 1 1 0 0 0 0
1 1 1 0 0 0 0 0
1 1 0 0 0 0 0 0
1 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0];
mask3=[1 1 0 0 0 0 0 0
1 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0];
X = blkproc(C,[8,8],'P1.*x',mask1); %保留15个系数
I1 = blkproc(X,[8,8],'P1*x*P2',D',D); %重构图像
X2 = blkproc(C,[8,8],'P1.*x',mask2); %保留10个系数
I2 = blkproc(X2,[8,8],'P1*x*P2',D',D); %重构图像
X3 = blkproc(C,[8,8],'P1.*x',mask3); %保留3个系数
I3 = blkproc(X3,[8,8],'P1*x*P2',D',D); %重构图像
subplot(2,4,1);imshow(I);
subplot(2,4,2);imshow(I1);
subplot(2,4,3);imshow(I2);
subplot(2,4,4);imshow(I3);
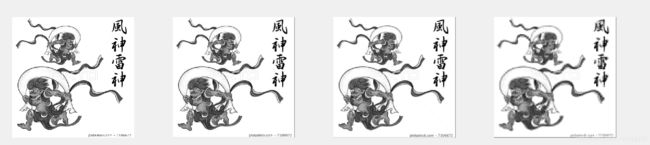
上面代码中,通过求得图像DCT系数,利用mask等矩阵对其进行量化,保留左上角主要的系数值,对于右下角的值由于其为非常小的高频系数,量化去除后对于图像的质量影响不大,可以利用这一性质对图像进行压缩处理。可以看到系数保留越少,则图像质量越差。
保留系数越多则图像压缩质量越好,下面比较几幅图像质量,从左到右分别为原图,mask1,mask2,mask3;
基于系统对象的图像/视频处理编程
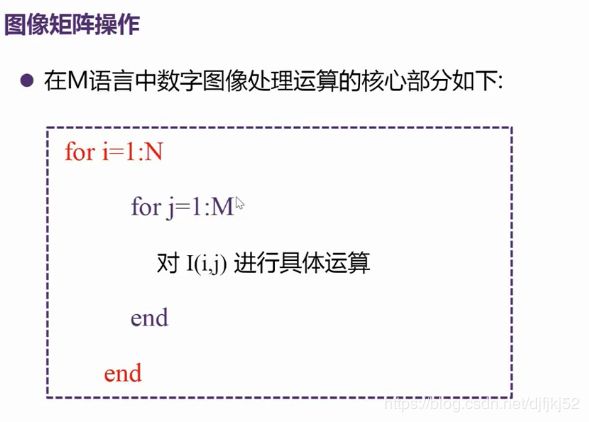
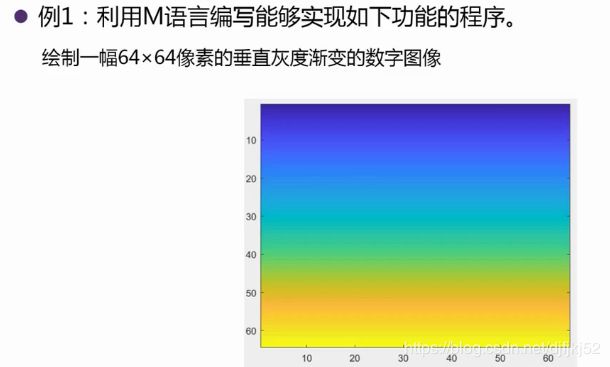
a=zeros(64,64);
for i=1:64
for j=1:64
a(i,j)=i;
end
end
image(a)

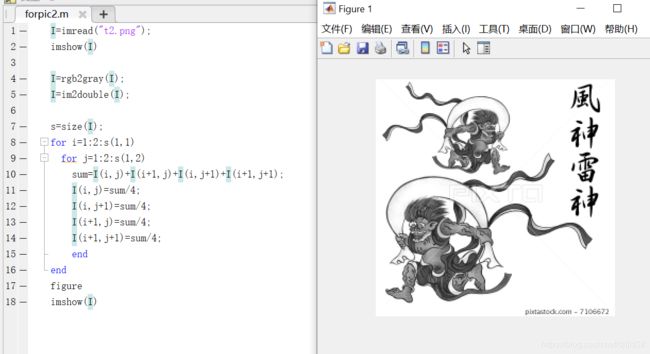
I=imread("t2.png");
imshow(I)
I=rbg2gray(I);
I=im2double(I);
s=size(I);
for i=1:2:s(1,1)
for j=1:2:s(1,2)
sum=I(i,j)+I(i+1,j)+I(i,j+1)+I(i+1,j+1);
I(i,j)=sum/4;
I(i,j+1)=sum/4;
I(i+1,j)=sum/4;
I(i+1,j+1)=sum/4;
end
end
figure
imshow(I)
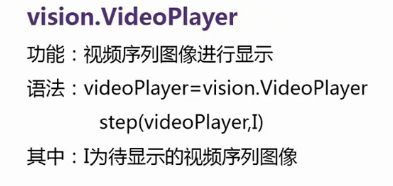
CVST系统对象编程


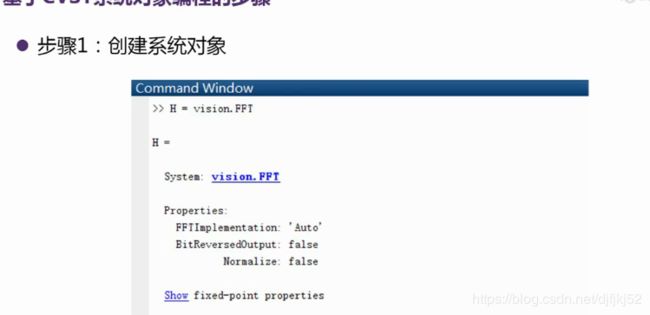
编程步骤
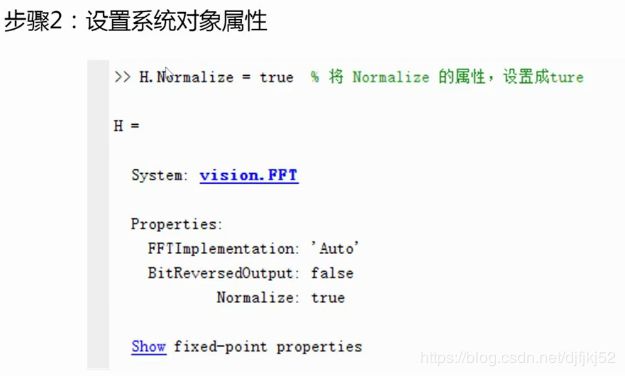
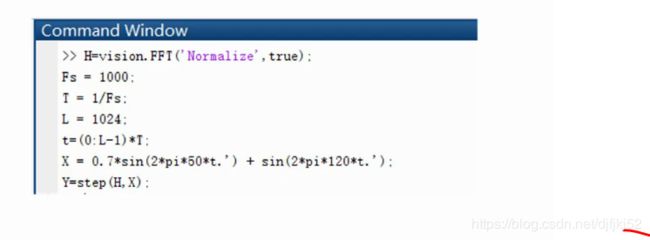
基于CVST系统对象编程的三个步骤,包括创建系统对象,设置系统对象属性,运行系统对象。
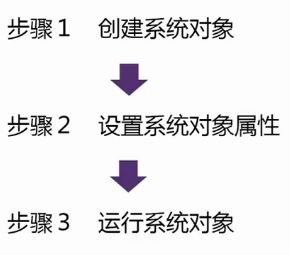
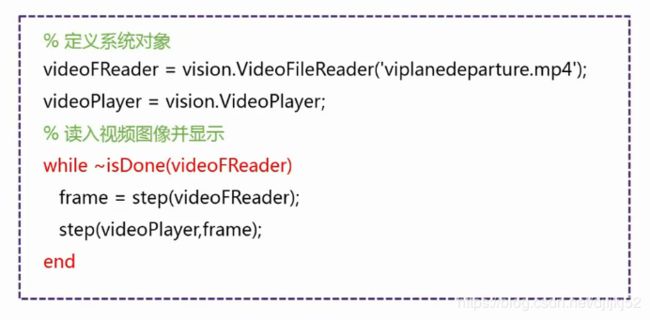
如下图,简化创建过程:
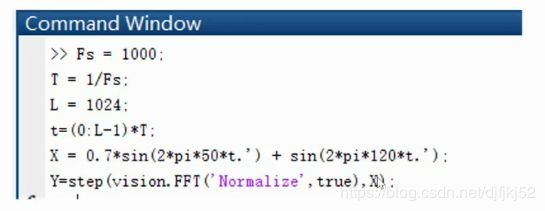
更加简化:
实例分析:

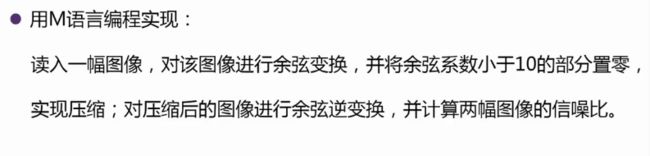
课程作业:

待续。。