LINUX下ZYNQ自定义IP中断驱动要点
中断驱动基础及常用API
设备树表示
需要在vivado中将PL的部分引入IRQ_F2P连号即可。
自定义IP的设备树可以很容易通过HDF文件和PETALINUX自动生成,具体命令为:
先配置下环境:
source *petalinux目录*/setting.sh
hsi
hsi后:
open_hw_design *hdf文件目录*
set_repo_path *device-tree-xlnx-xilinx-v2018.3库文件目录*
create_sw_design device-tree -os device_tree -proc ps7_cortexa9_0
generate_target -dir *存放目录*
自动生成之后可以看到一个名曰pl.dtsi的文件,里面放着自定义IP核的相关信息:
breath_led_ip_0: breath_led_ip@43c20000 {
clock-names = "s0_axi_aclk";
clocks = <&clkc 15>;
compatible = "xlnx,breath-led-ip-1.0";
interrupt-names = "breath_intr";
interrupt-parent = <&intc>;
interrupts = <0 29 4>;
reg = <0x43c20000 0x10000>;
xlnx,s0-axi-addr-width = <0x4>;
xlnx,s0-axi-data-width = <0x20>;
};
interrupt-parent = <&intc>;
interrupts = <0 29 4>;
0代表中断域为SPI中断,29代表硬件中断号为29+32=61。4代表触发方式,但具体触发方式貌似可以在自己写的LINUX驱动里修改。
驱动中每个中断都有一个中断号,通过中断号即可区分不同的中断。注意这里的中断号不是硬件的中断号,例如PL-PS的中断是从61开始的,但是这个61并不是LINUX的对应的中断号,我们需要通过irq_of_parse_and_map进行中断号进行申请。
unsigned int irq_of_parse_and_map(struct device_node *dev, int index)
dev :设备节点。
index:索引号,interrupts 属性可能包含多条中断信息,通过 index 指定要获取的信息。只要一个的话就写0。
linux中断API
int request_irq(unsigned int irq,
irq_handler_t handler,
unsigned long flags,
const char *name,
void *dev)
函数参数和返回值含义如下:
irq:要申请中断的中断号,是通过irq_of_parse_and_map返回的中断号,不是硬件终端号61。
handler:中断处理函数,当中断发生以后就会执行此中断处理函数。
flags:中断标志,可以在文件 include/linux/interrupt.h 里面查看所有的中断标志,里面有一堆标志,标志间可以通过或运算同时选择。这里可以设置触发方式。
name:中断名字,设置以后可以在/proc/interrupts 文件中看到对应的中断名字。
dev :如果将 flags 设置为 IRQF_SHARED 的话,dev 用来区分不同的中断,一般情况下将dev 设置为设备结构体,dev 会传递给中断处理函数 irq_handler_t 的第二个参数。笔者喜欢设置成NULL。
返回值:0 中断申请成功,其他负值 中断申请失败,如果返回-EBUSY 的话表示中断已经被申请了。
释放中断
void free_irq(unsigned int irq, void *dev)
函数参数和返回值含义如下:
irq :要释放的中断。
dev:如果中断设置为共享(IRQF_SHARED)的话,此参数用来区分具体的中断。共享中断
只有在释放最后中断处理函数的时候才会被禁止掉。
使用 request_irq 函数申请中断的时候需要设置中断处理函数,中断处理函数格式如下所示:
irqreturn_t (*irq_handler_t) (int, void *)
返回值要设置为:
return IRQ_RETVAL(IRQ_HANDLED)
一般通过下面两个函数对中断进行全局的关闭和开启:
local_irq_save(flags)
local_irq_restore(flags)
中断下半部
tasklet的套路:
/* 定义 taselet */
struct tasklet_struct testtasklet;
/* tasklet 处理函数 */
void testtasklet_func(unsigned long data)
{
}
/* 中断处理函数 */
irqreturn_t test_handler(int irq, void *dev_id)
{
......
tasklet_schedule(&testtasklet);
......
}
/* 驱动入口函数 */
static int __init xxxx_init(void)
{
......
/* 初始化 tasklet */
tasklet_init(&testtasklet, testtasklet_func, data);
......
}
工作队列的套路:
/* 定义工作(work) */
struct work_struct testwork;
/* work 处理函数 */
void testwork_func_t(struct work_struct *work);
{
/* work 具体处理内容 */
}
/* 中断处理函数 */
irqreturn_t test_handler(int irq, void *dev_id)
{
......
/* 调度 work */
schedule_work(&testwork);
......
}
/* 驱动入口函数 */
static int __init xxxx_init(void)
{
......
/* 初始化 work */
INIT_WORK(&testwork, testwork_func_t);
......
}
工作队列允许所需要的任务进入睡眠,不需要的话就就选择 tasklet。
程序设计
自定义IP每隔一段时间生成一个中断信号,驱动收到中断后将变量val置位,如果被测试程序读取,则将val复位。测试程序一直轮询驱动中val的值,当值为1时输出。
驱动程序:
#include 测试程序:
#include depmod,modprobe加载驱动:
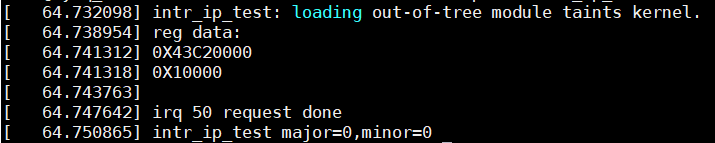
可以看到中断号是50,不是硬件设备号61。
测试APP
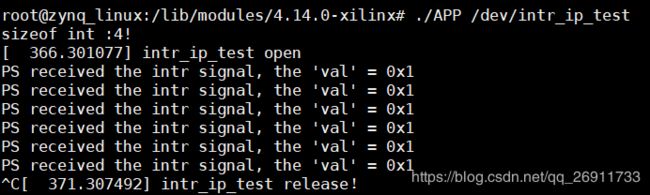
完美。