TencentOS-tiny 功耗管理 (二十 二)- tickless(低功耗)
一、功耗管理
- tickless
概述
TencentOS tiny的tickless机制提供了一套非周期性时钟的方案,在系统无需systick驱动调度的情况下,停掉systick。
初级功耗管理方案下,因为还有系统systick的存在,因此系统进入idle任务后,并不会在睡眠模式下停留太久。要想进入到更极致的低功耗状态,需要暂停systick。
arm架构提供三级低功耗模式,sleep、stop、standby模式,三种模式运行功耗逐次降低,standby模式最低。TencentOS tiny的内核提供了简洁清晰的接口来管理各级模式。
API讲解
void tos_tickless_wkup_alarm_install(k_cpu_lpwr_mode_t mode, k_tickless_wkup_alarm_t *wkup_alarm);此接口用以安装各低功耗模式下的唤醒闹钟。当内核进入tickless模式下后,systick以及停止了,因此需要其他计时器来将CPU从低功耗模式下唤醒。
根据arm v7m的芯片规格,三种模式下的唤醒源分别为:
-
sleep
CPU进入sleep模式后,可以由systick、硬件timer、RTC时钟唤醒(wakeup/alarm中断)。
-
stop
CPU进入stop模式后,可以由RTC时钟(wakeup/alarm中断)唤醒。
-
standby
CPU进入standby模式后,只可由RTC时钟的alarm中断唤醒(还可以通过外部管脚唤醒,但这不属于TencentOS tiny内核机制设计的范畴)。
k_tickless_wkup_alarm_t定义如下:
typedef struct k_tickless_wakeup_alarm_st {
int (*init)(void);
int (*setup)(k_time_t millisecond);
int (*dismiss)(void);
k_time_t (*max_delay)(void); /* in millisecond */
} k_tickless_wkup_alarm_t;一个唤醒闹钟有四个成员方法:
-
init
闹钟初始化函数。
-
setup
闹钟设定函数,入参为闹钟到期时间(单位毫秒)。此闹钟在设定完毕后的millisecond毫秒时来中断。
-
dismiss
闹钟解除函数,执行完后闹钟中断不会再来。
-
max_delay
此闹钟最长的到期时间(单位为毫秒)。
k_err_t tos_tickless_wkup_alarm_init(k_cpu_lpwr_mode_t mode);此函数用来初始化特定模式下的唤醒闹钟(实际上调用的是tos_tickless_wkup_alarm_install接口中安装的k_tickless_wkup_alarm_t的init方法)。
k_err_t tos_pm_cpu_lpwr_mode_set(k_cpu_lpwr_mode_t cpu_lpwr_mode);设置内核在tickless模式下进入的CPU低功耗模式。
编程实例
1、在tos_config.h中,配置低功耗组件开关TOS_CFG_PWR_MGR_EN:
#define TOS_CFG_PWR_MGR_EN 1u
2、在tos_config.h中,配置tickless组件开关TOS_CFG_TICKLESS_EN:
#define TOS_CFG_TICKLESS_EN 1u

3、STM32CubeMX修改libraries配置:



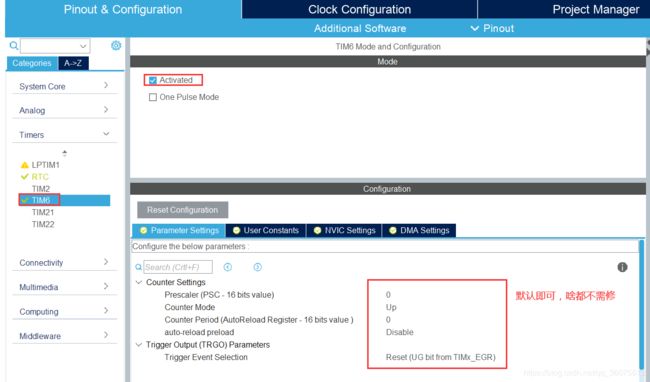
3、编写main.c示例代码:
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "rtc.h"
#include "tim.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "cmsis_os.h"
#include "stdio.h"
#include "tos_k.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
#define STK_SIZE_TASK_DEMO 512
#define PRIO_TASK_DEMO 4
k_stack_t stack_task_demo[STK_SIZE_TASK_DEMO];
k_task_t task_demo;
extern void entry_task_demo(void *arg);
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
void timer_callback(void *arg)
{
printf("timer callback: %ld\n", tos_systick_get());
}
void entry_task_demo(void *arg)
{
k_timer_t tmr;
// 创建一个软件定时器,每6000个tick触发一次
tos_timer_create(&tmr, 0u, 6000u, timer_callback, K_NULL, TOS_OPT_TIMER_PERIODIC);
tos_timer_start(&tmr);
// 此任务体内每3000个tick运行一次
while (K_TRUE) {
printf("entry task demo: %ld\n", tos_systick_get());
tos_task_delay(3000);
}
}
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_TIM6_Init();
MX_RTC_Init();
/* USER CODE BEGIN 2 */
tos_knl_init();
(void)tos_task_create(&task_demo, "demo1", entry_task_demo, NULL,
PRIO_TASK_DEMO, stack_task_demo, STK_SIZE_TASK_DEMO, 0);
tos_knl_start();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}4、实现tos_bsp_tickless_setup回调,直接在源码中找到tickless文件夹,复制到工程项目根目录即可,路径为:board\TOS_tiny_EVK_STM32L431CBT6\BSP\Src\tickless,同时把board\TOS_tiny_EVK_STM32L431CBT6\BSP\Inc\tickless中.h文件复制到tickless文件夹即可。
修改如下所示:




5、rtc.c文件,新增__weak字段

6、tim.c文件,新增__weak字段

7、bsp_pwr_mgr.c文件

8、bsp_pm_device.c文件

9、bsp_tickless_alarm.c文件
#include "tos_k.h"
#include "stm32l0xx_hal.h"
#include "stm32l0xx_hal_tim.h"
#include "stm32l0xx_hal_rtc.h"
#if TOS_CFG_TICKLESS_EN > 0u
static void tickless_systick_suspend(void)
{
cpu_systick_suspend();
cpu_systick_pending_reset();
}
static void tickless_systick_resume(void)
{
cpu_systick_resume();
}
static void tickless_systick_wkup_alarm_expires_set(k_time_t millisecond)
{
cpu_systick_expires_set(millisecond);
}
static int tickless_systick_wkup_alarm_setup(k_time_t millisecond)
{
tickless_systick_suspend();
tickless_systick_wkup_alarm_expires_set(millisecond);
tickless_systick_resume();
return 0;
}
static int tickless_systick_wkup_alarm_dismiss(void)
{
// TODO:
// if not wakeup by systick(that's say another interrupt), need to identify this and fix
return 0;
}
static k_time_t tickless_systick_wkup_alarm_max_delay(void)
{
return cpu_systick_max_delay_millisecond();
}
k_tickless_wkup_alarm_t tickless_wkup_alarm_systick = {
.init = K_NULL,
.setup = tickless_systick_wkup_alarm_setup,
.dismiss = tickless_systick_wkup_alarm_dismiss,
.max_delay = tickless_systick_wkup_alarm_max_delay,
};
/////////////////////////////////////////////////////////////////////////////////////////////
/////////////////////////////////////////////////////////////////////////////////////////////
static TIM_HandleTypeDef tim6;
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef *tim_handler)
{
if (tim_handler->Instance == TIM6) {
__HAL_RCC_TIM6_CLK_ENABLE();
/* TIM6 interrupt Init */
HAL_NVIC_SetPriority(TIM6_DAC_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(TIM6_DAC_IRQn);
}
}
void HAL_TIM_Base_MspDeInit(TIM_HandleTypeDef *tim_handler)
{
if (tim_handler->Instance == TIM6) {
/* Peripheral clock disable */
__HAL_RCC_TIM6_CLK_DISABLE();
/* TIM6 interrupt Deinit */
HAL_NVIC_DisableIRQ(TIM6_DAC_IRQn);
}
}
static int tickless_tim6_wkup_alarm_init(void)
{
tim6.Instance = TIM6;
tim6.Init.Prescaler = 0;
tim6.Init.CounterMode = TIM_COUNTERMODE_UP;
tim6.Init.Period = 0;
tim6.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
tim6.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
HAL_TIM_Base_Init(&tim6);
return 0;
}
static int tickless_tim6_wkup_alarm_setup(k_time_t millisecond)
{
tim6.Init.Prescaler = 8000 - 1;
tim6.Init.Period = (millisecond * 10) - 1;
HAL_TIM_Base_Stop(&tim6);
__HAL_TIM_CLEAR_IT(&tim6, TIM_IT_UPDATE);
HAL_TIM_Base_Init(&tim6);
HAL_TIM_Base_Start_IT(&tim6);
return 0;
}
static int tickless_tim6_wkup_alarm_dismiss(void)
{
TOS_CPU_CPSR_ALLOC();
TOS_CPU_INT_DISABLE();
HAL_TIM_Base_Stop(&tim6);
HAL_TIM_Base_Stop_IT(&tim6);
TOS_CPU_INT_ENABLE();
return 0;
}
static k_time_t tickless_tim6_wkup_alarm_max_delay(void)
{
k_time_t millisecond;
uint32_t max_period;
max_period = ~((uint32_t)0u);
millisecond = (max_period - 1) / 10;
return millisecond;
}
void TIM6_DAC_IRQHandler(void)
{
HAL_TIM_IRQHandler(&tim6);
}
k_tickless_wkup_alarm_t tickless_wkup_alarm_tim = {
.init = tickless_tim6_wkup_alarm_init,
.setup = tickless_tim6_wkup_alarm_setup,
.dismiss = tickless_tim6_wkup_alarm_dismiss,
.max_delay = tickless_tim6_wkup_alarm_max_delay,
};
/////////////////////////////////////////////////////////////////////////////////////////////
/////////////////////////////////////////////////////////////////////////////////////////////
static RTC_HandleTypeDef rtc_handler;
static HAL_StatusTypeDef tickless_rtc_time_set(uint8_t hour, uint8_t minu, uint8_t sec, uint8_t format)
{
RTC_TimeTypeDef rtc_time;
rtc_time.Hours = hour;
rtc_time.Minutes = minu;
rtc_time.Seconds = sec;
rtc_time.TimeFormat = format;
rtc_time.DayLightSaving = RTC_DAYLIGHTSAVING_NONE;
rtc_time.StoreOperation = RTC_STOREOPERATION_RESET;
return HAL_RTC_SetTime(&rtc_handler, &rtc_time, RTC_FORMAT_BIN);
}
static HAL_StatusTypeDef tickless_rtc_date_set(uint8_t year, uint8_t month, uint8_t date, uint8_t week)
{
RTC_DateTypeDef rtc_date;
rtc_date.Date = date;
rtc_date.Month = month;
rtc_date.WeekDay = week;
rtc_date.Year = year;
return HAL_RTC_SetDate(&rtc_handler, &rtc_date, RTC_FORMAT_BIN);
}
static int tickless_rtc_wkup_alarm_init(void)
{
rtc_handler.Instance = RTC;
rtc_handler.Init.HourFormat = RTC_HOURFORMAT_24;
rtc_handler.Init.AsynchPrediv = 0X7F;
rtc_handler.Init.SynchPrediv = 0XFF;
rtc_handler.Init.OutPut = RTC_OUTPUT_DISABLE;
rtc_handler.Init.OutPutPolarity = RTC_OUTPUT_POLARITY_HIGH;
rtc_handler.Init.OutPutType = RTC_OUTPUT_TYPE_OPENDRAIN;
if (HAL_RTC_Init(&rtc_handler) != HAL_OK) {
return -1;
}
if (HAL_RTCEx_BKUPRead(&rtc_handler, RTC_BKP_DR0) != 0X5050) {
tickless_rtc_time_set(23, 59, 56, RTC_HOURFORMAT12_PM);
tickless_rtc_date_set(15, 12, 27, 7);
HAL_RTCEx_BKUPWrite(&rtc_handler, RTC_BKP_DR0,0X5050);
}
return 0;
}
static int tickless_rtc_wkupirq_wkup_alarm_setup(k_time_t millisecond)
{
uint32_t wkup_clock = RTC_WAKEUPCLOCK_CK_SPRE_16BITS;
if (millisecond < 1000) {
millisecond = 1000;
}
uint32_t wkup_count = (millisecond / 1000) - 1;
__HAL_RTC_WAKEUPTIMER_CLEAR_FLAG(&rtc_handler, RTC_FLAG_WUTF);
HAL_RTCEx_SetWakeUpTimer_IT(&rtc_handler, wkup_count, wkup_clock);
HAL_NVIC_SetPriority(RTC_IRQn, 0x02, 0x02);
HAL_NVIC_EnableIRQ(RTC_IRQn);
return 0;
}
static int tickless_rtc_wkupirq_wkup_alarm_dismiss(void)
{
#if defined(STM32F0) || defined(STM32L0)
__HAL_PWR_CLEAR_FLAG(PWR_FLAG_WU);
#endif
__HAL_RTC_WAKEUPTIMER_CLEAR_FLAG(&rtc_handler, RTC_FLAG_WUTF);
if (HAL_RTCEx_DeactivateWakeUpTimer(&rtc_handler) != HAL_OK) {
return -1;
}
HAL_NVIC_DisableIRQ(RTC_IRQn);
return 0;
}
static k_time_t tickless_rtc_wkupirq_wkup_alarm_max_delay(void)
{
return 0xFFFF * K_TIME_MILLISEC_PER_SEC;
}
void HAL_RTC_MspInit(RTC_HandleTypeDef *rtc_handler)
{
RCC_OscInitTypeDef rcc_osc;
RCC_PeriphCLKInitTypeDef periph_clock;
__HAL_RCC_PWR_CLK_ENABLE();
HAL_PWR_EnableBkUpAccess();
rcc_osc.OscillatorType = RCC_OSCILLATORTYPE_LSE;
rcc_osc.PLL.PLLState = RCC_PLL_NONE;
rcc_osc.LSEState = RCC_LSE_ON;
HAL_RCC_OscConfig(&rcc_osc);
periph_clock.PeriphClockSelection = RCC_PERIPHCLK_RTC;
periph_clock.RTCClockSelection = RCC_RTCCLKSOURCE_LSE;
HAL_RCCEx_PeriphCLKConfig(&periph_clock);
__HAL_RCC_RTC_ENABLE();
}
void RTC_WKUP_IRQHandler(void)
{
HAL_RTCEx_WakeUpTimerIRQHandler(&rtc_handler);
}
void HAL_RTCEx_WakeUpTimerEventCallback(RTC_HandleTypeDef *rtc_handler)
{
}
k_tickless_wkup_alarm_t tickless_wkup_alarm_rtc_wkupirq = {
.init = tickless_rtc_wkup_alarm_init,
.setup = tickless_rtc_wkupirq_wkup_alarm_setup,
.dismiss = tickless_rtc_wkupirq_wkup_alarm_dismiss,
.max_delay = tickless_rtc_wkupirq_wkup_alarm_max_delay,
};
/////////////////////////////////////////////////////////////////////////////////////////////
/////////////////////////////////////////////////////////////////////////////////////////////
static int tickless_rtc_alarmirq_wkup_alarm_setup(k_time_t millisecond)
{
uint8_t hour, minute, second, subsecond, date;
RTC_AlarmTypeDef rtc_alarm;
RTC_TimeTypeDef rtc_time;
RTC_DateTypeDef rtc_date;
HAL_RTC_GetTime(&rtc_handler, &rtc_time, RTC_FORMAT_BIN);
HAL_RTC_GetDate(&rtc_handler, &rtc_date, RTC_FORMAT_BIN);
hour = rtc_time.Hours;
minute = rtc_time.Minutes;
second = rtc_time.Seconds;
#if 0
date = rtc_date.Date;
#else
date = rtc_date.WeekDay;
#endif
printf("before >>> %d %d %d %d\n", date, hour, minute, second);
/* I know it's ugly, I will find a elegant way. Welcome to tell me, 3ks~ */
second += millisecond / K_TIME_MILLISEC_PER_SEC;
if (second >= 60) {
minute += 1;
second -= 60;
}
if (minute >= 60) {
hour += 1;
minute -= 60;
}
if (hour >= 24) {
date += 1;
hour -= 24;
}
printf("after >>> %d %d %d %d\n", date, hour, minute, second);
rtc_alarm.AlarmTime.Hours = hour;
rtc_alarm.AlarmTime.Minutes = minute;
rtc_alarm.AlarmTime.Seconds = second;
rtc_alarm.AlarmTime.SubSeconds = 0;
rtc_alarm.AlarmTime.TimeFormat = RTC_HOURFORMAT12_AM;
rtc_alarm.AlarmMask = RTC_ALARMMASK_NONE;
rtc_alarm.AlarmSubSecondMask = RTC_ALARMSUBSECONDMASK_NONE;
rtc_alarm.AlarmDateWeekDaySel = RTC_ALARMDATEWEEKDAYSEL_WEEKDAY; // RTC_ALARMDATEWEEKDAYSEL_DATE; // RTC_ALARMDATEWEEKDAYSEL_WEEKDAY;
rtc_alarm.AlarmDateWeekDay = date;
rtc_alarm.Alarm = RTC_ALARM_A;
HAL_RTC_SetAlarm_IT(&rtc_handler, &rtc_alarm, RTC_FORMAT_BIN);
/*
//STM32L0系列没有Alarm中断线
HAL_NVIC_SetPriority(RTC_Alarm_IRQn, 0x01, 0x02);
HAL_NVIC_EnableIRQ(RTC_Alarm_IRQn);
*/
// __HAL_PWR_GET_FLAG(PWR_FLAG_WU)
__HAL_RCC_AHB_FORCE_RESET(); //复位所有IO口
__HAL_RCC_PWR_CLK_ENABLE(); //使能PWR时钟
// __HAL_RCC_BACKUPRESET_FORCE(); //复位备份区域
HAL_PWR_EnableBkUpAccess(); //后备区域访问使能
__HAL_PWR_CLEAR_FLAG(PWR_FLAG_SB);
__HAL_RTC_WRITEPROTECTION_DISABLE(&rtc_handler);//关闭RTC写保护
//关闭RTC相关中断
__HAL_RTC_WAKEUPTIMER_DISABLE_IT(&rtc_handler,RTC_IT_WUT);
#if 0
__HAL_RTC_TIMESTAMP_DISABLE_IT(&rtc_handler,RTC_IT_TS);
__HAL_RTC_ALARM_DISABLE_IT(&rtc_handler,RTC_IT_ALRA|RTC_IT_ALRB);
#endif
//清除RTC相关中断标志位
__HAL_RTC_ALARM_CLEAR_FLAG(&rtc_handler,RTC_FLAG_ALRAF|RTC_FLAG_ALRBF);
__HAL_RTC_TIMESTAMP_CLEAR_FLAG(&rtc_handler,RTC_FLAG_TSF);
__HAL_RTC_WAKEUPTIMER_CLEAR_FLAG(&rtc_handler,RTC_FLAG_WUTF);
// __HAL_RCC_BACKUPRESET_RELEASE(); //备份区域复位结束
__HAL_RTC_WRITEPROTECTION_ENABLE(&rtc_handler); //使能RTC写保护
#ifdef STM32F4
__HAL_PWR_CLEAR_FLAG(PWR_FLAG_WU); //清除Wake_UP标志
#endif
#ifdef STM32F7
// __HAL_PWR_CLEAR_WAKEUP_FLAG(PWR_WAKEUP_PIN_FLAG1); //清除Wake_UP标志
#endif
// HAL_PWR_EnableWakeUpPin(PWR_WAKEUP_PIN1); //设置WKUP用于唤醒
return 0;
}
static int tickless_rtc_alarmirq_wkup_alarm_dismiss(void)
{
#if 1
// __HAL_PWR_GET_FLAG(PWR_FLAG_WU);
__HAL_PWR_CLEAR_FLAG(PWR_FLAG_WU);
// __HAL_RTC_WAKEUPTIMER_CLEAR_FLAG(&rtc_handler, RTC_FLAG_ALRAF);
__HAL_RTC_ALARM_CLEAR_FLAG(&rtc_handler, RTC_FLAG_ALRAF);
#if 0
if (HAL_RTCEx_DeactivateWakeUpTimer(&rtc_handler) != HAL_OK) {
return -1;
}
#endif
// HAL_NVIC_DisableIRQ(RTC_Alarm_IRQn); //STM32L0系列没有Alarm中断线
return 0;
#endif
}
static k_time_t tickless_rtc_alarmirq_wkup_alarm_max_delay(void)
{
return 0xFFFF; // just kidding, I will fix it out. Welcome to tell me, 3ks~ */
}
void RTC_Alarm_IRQHandler(void)
{
HAL_RTC_AlarmIRQHandler(&rtc_handler);
}
void HAL_RTC_AlarmAEventCallback(RTC_HandleTypeDef *rtc_handler)
{
}
k_tickless_wkup_alarm_t tickless_wkup_alarm_rtc_alarmirq = {
.init = tickless_rtc_wkup_alarm_init,
.setup = tickless_rtc_alarmirq_wkup_alarm_setup,
.dismiss = tickless_rtc_alarmirq_wkup_alarm_dismiss,
.max_delay = tickless_rtc_alarmirq_wkup_alarm_max_delay,
};
#endif
10、为了观察在tickless时是否确实没有systick中断,在tos_sys.c的idle任务体内加一句调试代码:
__STATIC__ void knl_idle_entry(void *arg)
{
arg = arg; // make compiler happy
while (K_TRUE) {
#if TOS_CFG_TASK_DYNAMIC_CREATE_EN > 0u
// 这里在idle任务体内加上一句打印,如果systick正常开启,在没有用户任务运行时,此调试信息会不断打印;如果是tickless状态,此调试信息应该只会第一次进入idle任务时,或在用户任务等待到期,或用户的软件定时器到期时,才打印一次。
printf("idle entry: %ld\n", tos_systick_get());
task_free_all();
#endif
#if TOS_CFG_PWR_MGR_EN > 0u
pm_power_manager();
#endif
}
}11、运行效果:

源码链接:Git