从0到1学习FreeRTOS:FreeRTOS + 基础外设 :(一)点亮板载LED灯
从0到1学习FreeRTOS:FreeRTOS + 基础外设 :(一)点亮板载LED灯
特别说明:
本文主要讲解FreeRTOS和外设的合并。
想要学习FreeRTOS请移步至从0到1攻破FreeRTOS:汇总帖选择相关内容进行观看即可。
想要学习关于GPIO和点亮板载LED请移步至再造STM32:汇总贴选择相关内容进行观看即可。
目录
特别说明:
一、知识点
1、GPIO
2、点亮LED
3、延时函数vTaskDelay()和UntilvTaskDelay()
二、LED部分的配置
三、LED函数:
1、使用vTaskDelay()延时函数
2、使用vTaskDelayUntil()绝对延时函数
四、main.c
五、实验现象:
1、vTaskDelay()的实验结果
2、vTaskDelayUntil()的实验结果
3、对比不同
一、知识点
1、GPIO GPIO的讲解
2、点亮LED 再造STM32---第九部分:GPIO输出—使用固件库点亮LED
3、延时函数vTaskDelay()和UntilvTaskDelay() 对比不同
二、LED部分的配置
关于LED配置部分不过多讲解,如果想了解,请移步:
GPIO的讲解
再造STM32---第九部分:GPIO输出—使用固件库点亮LED
bsp_led.c文件
/**
******************************************************************************
* @file main.c
* @author Sumjess
* @version V1.0
* @date 2019-05-xx
* @brief led应用函数接口
******************************************************************************
* @attention
*
* 实验平台 :STM32 F429
* CSDN Blog :https://blog.csdn.net/qq_38351824
* 微信公众号 :Tech云
*
******************************************************************************
*/
#include "bsp_led.h"
/**
* @brief 初始化控制LED的IO
* @param 无
* @retval 无
*/
void LED_GPIO_Config(void)
{
/*定义一个GPIO_InitTypeDef类型的结构体*/
GPIO_InitTypeDef GPIO_InitStructure;
/*开启LED相关的GPIO外设时钟*/
RCC_AHB1PeriphClockCmd ( LED1_GPIO_CLK|
LED2_GPIO_CLK|
LED3_GPIO_CLK, ENABLE);
/*选择要控制的GPIO引脚*/
GPIO_InitStructure.GPIO_Pin = LED1_PIN;
/*设置引脚模式为输出模式*/
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
/*设置引脚的输出类型为推挽输出*/
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
/*设置引脚为上拉模式*/
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
/*设置引脚速率为2MHz */
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
/*调用库函数,使用上面配置的GPIO_InitStructure初始化GPIO*/
GPIO_Init(LED1_GPIO_PORT, &GPIO_InitStructure);
/*选择要控制的GPIO引脚*/
GPIO_InitStructure.GPIO_Pin = LED2_PIN;
GPIO_Init(LED2_GPIO_PORT, &GPIO_InitStructure);
/*选择要控制的GPIO引脚*/
GPIO_InitStructure.GPIO_Pin = LED3_PIN;
GPIO_Init(LED3_GPIO_PORT, &GPIO_InitStructure);
/*关闭RGB灯*/
LED_RGBOFF;
}bsp_led.h文件
#ifndef __BSP_LED_H
#define __BSP_LED_H
#include "stm32f4xx.h"
//引脚定义
/*******************************************************/
//R 红色灯
#define LED1_PIN GPIO_Pin_10
#define LED1_GPIO_PORT GPIOH
#define LED1_GPIO_CLK RCC_AHB1Periph_GPIOH
//G 绿色灯
#define LED2_PIN GPIO_Pin_11
#define LED2_GPIO_PORT GPIOH
#define LED2_GPIO_CLK RCC_AHB1Periph_GPIOH
//B 蓝色灯
#define LED3_PIN GPIO_Pin_12
#define LED3_GPIO_PORT GPIOH
#define LED3_GPIO_CLK RCC_AHB1Periph_GPIOH
/************************************************************/
/* 定义控制IO的宏 */
#define LED1_TOGGLE digitalToggle(LED1_GPIO_PORT,LED1_PIN)
#define LED1_OFF digitalHi(LED1_GPIO_PORT,LED1_PIN)
#define LED1_ON digitalLo(LED1_GPIO_PORT,LED1_PIN)
#define LED2_TOGGLE digitalToggle(LED2_GPIO_PORT,LED2_PIN)
#define LED2_OFF digitalHi(LED2_GPIO_PORT,LED2_PIN)
#define LED2_ON digitalLo(LED2_GPIO_PORT,LED2_PIN)
#define LED3_TOGGLE digitalToggle(LED3_GPIO_PORT,LED3_PIN)
#define LED3_OFF digitalHi(LED3_GPIO_PORT,LED3_PIN)
#define LED3_ON digitalLo(LED3_GPIO_PORT,LED3_PIN)
void LED_GPIO_Config(void);
#endif /* __LED_H */
三、LED函数:
1、使用vTaskDelay()延时函数
/**********************************************************************
* @ 函数名 : LED_Task
* @ 功能说明: LED_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void LED_Task(void* parameter)
{
while (1)
{
LED1_ON;
printf("LED_Task Running,LED1_ON\r\n");
vTaskDelay(500); /* 延时500个tick */
printf("tick1 = %d\r\n",xTaskGetTickCount());
LED1_OFF;
printf("LED_Task Running,LED1_OFF\r\n");
vTaskDelay(500); /* 延时500个tick */
printf("tick2 = %d\r\n",xTaskGetTickCount());
}
}2、使用vTaskDelayUntil()绝对延时函数
/**********************************************************************
* @ 函数名 : LED_Task
* @ 功能说明: LED_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void LED_Task(void* parameter)
{
static TickType_t pxPreviousWakeTime; //定义上一次唤醒任务的时间点
const TickType_t xTimeIncrement = pdMS_TO_TICKS(500); //任务周期时间 --- 定义延时时间 --- pdMS_TO_TICKS毫秒转tick
pxPreviousWakeTime = xTaskGetTickCount(); //获取当前Tick值
while (1)
{
LED1_ON;
printf("LED_Task Running,LED1_ON\r\n");
vTaskDelayUntil( &pxPreviousWakeTime, xTimeIncrement ); //在上面已经设置成500ms
printf("tick1 = %d\r\n",xTaskGetTickCount());
LED1_OFF;
printf("LED_Task Running,LED1_OFF\r\n");
vTaskDelayUntil( &pxPreviousWakeTime, xTimeIncrement ); //在上面已经设置成500ms
printf("tick2 = %d\r\n",xTaskGetTickCount());
}
}四、main.c
/**
******************************************************************************
* @file main.c
* @author Sumjess
* @version V1.0
* @date 2019-09-xx
* @brief MDK5.27
******************************************************************************
* @attention
*
* 实验平台 :STM32 F429
* CSDN Blog :https://blog.csdn.net/qq_38351824
* 微信公众号 :Tech云
*
******************************************************************************
*/
/*
*************************************************************************
* 包含的头文件
*************************************************************************
*/
/* FreeRTOS头文件 */
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h" //消息队列
#include "semphr.h" //信号量、互斥信号量
#include "event_groups.h" //事件
#include "timers.h" //软件定时器
/* 开发板硬件bsp头文件 */
#include "sum_common.h"
#include "limits.h" //任务通知使用的
/**************************** 任务句柄 ********************************/
/*
* 任务句柄是一个指针,用于指向一个任务,当任务创建好之后,它就具有了一个任务句柄
* 以后我们要想操作这个任务都需要通过这个任务句柄,如果是自身的任务操作自己,那么
* 这个句柄可以为NULL。
*/
static TaskHandle_t AppTaskCreate_Handle = NULL;/* 创建任务句柄 */
static TaskHandle_t LED_Task_Handle = NULL;/* LED_Task任务句柄 */
/*
*************************************************************************
* 函数声明
*************************************************************************
*/
static void AppTaskCreate(void);/* 用于创建任务 */
static void LED_Task(void* pvParameters);/* LED_Task任务实现 */
static void BSP_Init(void);/* 用于初始化板载相关资源 */
/*****************************************************************
* @brief 主函数
* @param 无
* @retval 无
* @note 第一步:开发板硬件初始化
第二步:创建APP应用任务
第三步:启动FreeRTOS,开始多任务调度
****************************************************************/
int main(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
/* 开发板硬件初始化 */
BSP_Init();
printf("这是一个 FreeRTOS 实验!\r\n");
/* 创建AppTaskCreate任务 */
xReturn = xTaskCreate((TaskFunction_t )AppTaskCreate, /* 任务入口函数---即任务函数的名称,需要我们自己定义并且实现。*/
(const char* )"AppTaskCreate",/* 任务名字---字符串形式, 最大长度由 FreeRTOSConfig.h 中定义的configMAX_TASK_NAME_LEN 宏指定,多余部分会被自动截掉,这里任务名字最好要与任务函数入口名字一致,方便进行调试。*/
(uint16_t )512, /* 任务栈大小---字符串形式, 最大长度由 FreeRTOSConfig.h 中定义的configMAX_TASK_NAME_LEN 宏指定,多余部分会被自动截掉,这里任务名字最好要与任务函数入口名字一致,方便进行调试。*/
(void* )NULL,/* 任务入口函数参数---字符串形式, 最大长度由 FreeRTOSConfig.h 中定义的configMAX_TASK_NAME_LEN 宏指定,多余部分会被自动截掉,这里任务名字最好要与任务函数入口名字一致,方便进行调试。*/
(UBaseType_t )1, /* 任务的优先级---优先级范围根据 FreeRTOSConfig.h 中的宏configMAX_PRIORITIES 决定, 如果使能 configUSE_PORT_OPTIMISED_TASK_SELECTION,这个宏定义,则最多支持 32 个优先级;如果不用特殊方法查找下一个运行的任务,那么则不强制要求限制最大可用优先级数目。在 FreeRTOS 中, 数值越大优先级越高, 0 代表最低优先级。*/
(TaskHandle_t* )&AppTaskCreate_Handle);/* 任务控制块指针---在使用内存的时候,需要给任务初始化函数xTaskCreateStatic()传递预先定义好的任务控制块的指针。在使用动态内存的时候,任务创建函数 xTaskCreate()会返回一个指针指向任务控制块,该任务控制块是 xTaskCreate()函数里面动态分配的一块内存。*/
/* 启动任务调度 */
if(pdPASS == xReturn)
vTaskStartScheduler(); /* 启动任务,开启调度 */
else
return -1;
while(1); /* 正常不会执行到这里 */
}
/***********************************************************************
* @ 函数名 : AppTaskCreate
* @ 功能说明: 为了方便管理,所有的任务创建函数都放在这个函数里面
* @ 参数 : 无
* @ 返回值 : 无
**********************************************************************/
static void AppTaskCreate(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
taskENTER_CRITICAL(); //进入临界区
///////////////////////////////////////////////////////////////////////////////////////////////
/* 创建LED_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )LED_Task, /* 任务入口函数 */
(const char* )"LED_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL, /* 任务入口函数参数 */
(UBaseType_t )2, /* 任务的优先级 */
(TaskHandle_t* )&LED_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建LED_Task任务成功\r\n");
///////////////////////////////////////////////////////////////////////////////////////////////
vTaskDelete(AppTaskCreate_Handle); //删除AppTaskCreate任务
taskEXIT_CRITICAL(); //退出临界区
}
/**********************************************************************
* @ 函数名 : LED_Task
* @ 功能说明: LED_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void LED_Task(void* parameter)
{
static TickType_t pxPreviousWakeTime; //定义上一次唤醒任务的时间点
const TickType_t xTimeIncrement = pdMS_TO_TICKS(500); //任务周期时间 --- 定义延时时间 --- pdMS_TO_TICKS毫秒转tick
pxPreviousWakeTime = xTaskGetTickCount(); //获取当前Tick值
while (1)
{
LED1_ON;
printf("LED_Task Running,LED1_ON\r\n");
vTaskDelayUntil( &pxPreviousWakeTime, xTimeIncrement ); //在上面已经设置成500ms
printf("tick1 = %d\r\n",xTaskGetTickCount());
LED1_OFF;
printf("LED_Task Running,LED1_OFF\r\n");
vTaskDelayUntil( &pxPreviousWakeTime, xTimeIncrement ); //在上面已经设置成500ms
printf("tick2 = %d\r\n",xTaskGetTickCount());
}
}
/***********************************************************************
* @ 函数名 : BSP_Init
* @ 功能说明: 板级外设初始化,所有板子上的初始化均可放在这个函数里面
* @ 参数 :
* @ 返回值 : 无
*********************************************************************/
static void BSP_Init(void)
{
/*
* STM32中断优先级分组为4,即4bit都用来表示抢占优先级,范围为:0~15
* 优先级分组只需要分组一次即可,以后如果有其他的任务需要用到中断,
* 都统一用这个优先级分组,千万不要再分组,切忌。
*/
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 );
/* LED 初始化 */
LED_GPIO_Config();
/* 串口初始化 */
Debug_USART_Config();
/* 按键初始化 */
Key_GPIO_Config();
}
/********************************END OF FILE****************************/
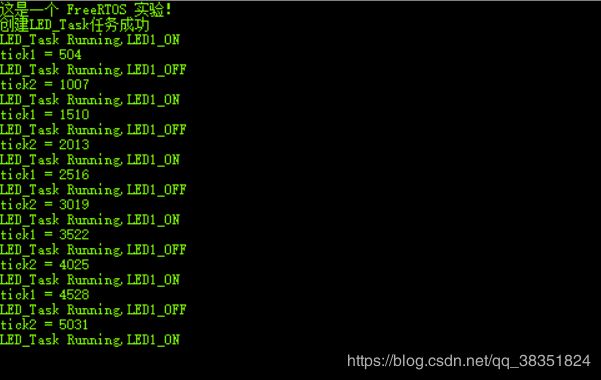
五、实验现象:
1、vTaskDelay()的实验结果
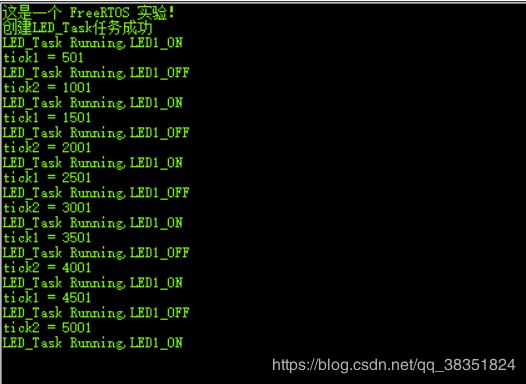
2、vTaskDelayUntil()的实验结果
3、对比不同
vTaskDelay()的延时函数,并没有保证延时500ms,而是503ms,言外之意,这是一个相对延时,延迟任务直到一个指定的时间结束。而如果我们要保证该函数用在周期性任务以保证任务执行频率的稳定,就必须要使用vTaskDelayUntil(),绝对延时。