SPI专题(二)——STM32驱动FLASH(W25Q64)
前言:
为了方便查看博客,特意申请了一个公众号,附上二维码,有兴趣的朋友可以关注,和我一起讨论学习,一起享受技术,一起成长。

github:my github
注:博客所涉及的关于 stm32 的代码,均在仓库【stm32f013_study】下,包括底层驱动和应用测试代码。
本文设计的文件包含:
(1)hardware_spi.c:硬件 SPI 驱动实现
(2)drvsfspi.c:软件模拟 SPI 实现代码
(3)drvexflash.c:SPI FLASH 操作部分代码
(4)hal_spi.c:SPI 软件、硬件方式封装统一接口
(5)头文件:
hardware_spi.h :硬件 SPI 相关
drvsfspi.h :软件模拟 SPI 相关
drvexflash.hSPI FLASH 相关
hal_spi.h:软件、硬件 SPI 接口封装
1. 硬件连接
W25Q64 将 8M 的容量分为 128 个块(Block),每个块大小为 64K 字节,每个块又分为 16个扇区(Sector),每个扇区 4K 个字节。
W25Q64 的**最少擦除单位为一个扇区,也就是每次必须擦除 4K 个字节。**操作需要给 W25Q64 开辟一个至少 4K 的缓存区,对 SRAM 要求比较高,要求芯片必须有 4K 以上 SRAM 才能很好的操作。

W25Q64 的擦写周期多达 10W 次,具有 20 年的数据保存期限,支持电压为 2.7~3.6V,W25Q64 支持标准的 SPI,还支持双输出/四输出的 SPI,最大 SPI 时钟可以到 80Mhz(双输出时相当于 160Mhz,四输出时相当于 320M)。
1.1 硬件连接
与 STM32 的引脚连接如下:这里是使用SPI1配置。

| STM32引脚 | 对应SPI功能 |
|---|---|
| PA2 | 片选CS |
| PA5 | 时钟SCK |
| PA6 | MISO |
| PA7 | MOSI |
STM32 的 SPI 功能很强大, SPI 时钟最多可以到 18Mhz,支持 DMA,可以配置为 SPI 协议或者 I2S 协议(仅大容量型号支持)。
1.2 SPI 通讯的通讯时序
SPI 协议定义了通讯的起始和停止信号、数据有效性、时钟同步等环节。
我们以读取 FLASH 的状态寄存器的时序图分析一下,时序图也是书写软件模拟时序的依据。
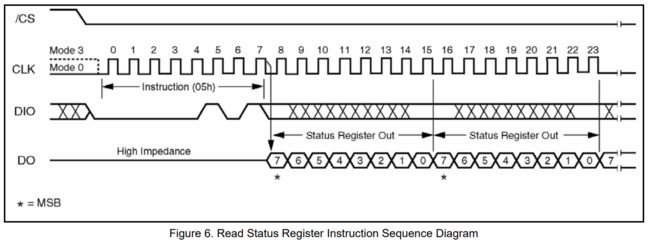
如上图,我们知道书写 FLASH (来自华邦 W25X 手册)支持的是模式 0 (CPOL = 0 && CPHA == 0) 和 模式 3(CPOL = 1 && CPHA == 1)
CS、SCK、MOSI 信号都由主机控制产生,而 MISO 的信号由从机产生,主机通过该信号线读取从机的数据。MOSI 与 MISO 的信号只在 CS 为低电平的时候才有效,在 SCK 的每个时钟周期 MOSI 和 MISO 传输一位数据。
1.2.1. 通讯的起始和停止信号
在上图,CS 信号线由高变低,为 SPI 通讯的起始信号。CS 是每个从机各自独占的信号线,当从机在自己的 CS 线检测到起始信号后,就知道自己被主机选中了,开始准备与主机通讯。当 CS 信号由低变高,为 SPI 通讯的停止信号,表示本次通讯结束,从机的选中状态被取消。
1.2.2. 数据有效性
SPI 使用 MOSI 及 MISO 信号线来传输数据,使用 SCK 信号线进行数据同步。

MOSI 及 MISO 数据线在 SCK 的每个时钟周期传输一位数据。数据传输时,MSB 先行或 LSB 先行并没有作硬性规定,但要保证两个 SPI 通讯设备之间使用同样的协定,一般都会采用图中的 MSB 先行模式。
观察上图,可知模式 0 和 3 都是在上升沿读取数据。
示例: FLASH 读取 JEDEC_ID (0x9F),SPI 模式 0,,频率 f = 1MHz。

读取 JEDEC_ID 时,FLASH 回复的一个字节:0xC8。

1.2.3 STM32 SPI外设
STM32 的 SPI 外设可用作通讯的主机及从机,支持最高的 SCK 时钟频率为 f pclk / 2 (STM32F103 型号的芯片默认 f pclk1 为 72MHz,f pclk2 为 36MHz),完全支持 SPI 协议的 4 种模式,数据帧长度可设置为 8 位或 16 位,可设置数据 MSB 先行或 LSB 先行。它还支持双线全双工、双线单向以及单线模式。
SPI架构:

通讯引脚 :
SPI 的所有硬件架构都从上图中左 MOSI、MISO、SCK及 NSS 线展开的。
STM32 芯片有多个 SPI 外设,它们的 SPI 通讯信号引出到不同的 GPIO 引脚上,使用时必须配置到这些指定的引脚。
2. 软件配置
这里使用 STM32 的 SPI1 的主模式,SPI 相关的库函数和定义分布在文件 stm32f10x_spi.c 以及头文件 stm32f10x_spi.h 中。
2.1 配置相关引脚的复用功能
第一步就要使能 SPI1 的时钟, SPI1 的时钟通过 APB2ENR 的第 12 位来设置。其次要设置 SPI1 的相关引脚为复用输出,这样才会连接到 SPI1 上否则这些 IO 口还是默认的状态,也就是标准输入输出口。这里我们使用的是 PA5、 PA6、 PA7 这 3 个(SCK、 MISO、 MOSI、CS 使用软件管理方式),所以设置这三个为复用 IO。
宏定义:
#define SPIM1_GPIO_PORT GPIOA
#define SPIM1_CLK_IO (GPIO_Pin_5)
#define SPIM1_MISO_IO (GPIO_Pin_6)
#define SPIM1_MOSI_IO (GPIO_Pin_7)
#define FLASH_CS_IO (GPIO_Pin_2)
#define FLASH_CS_0() (GPIO_ResetBits(SPIM1_GPIO_PORT, FLASH_CS_IO))
#define FLASH_CS_1() (GPIO_SetBits(SPIM1_GPIO_PORT, FLASH_CS_IO))
#define RCC_PCLK_SPIM1_GPIO RCC_APB2Periph_GPIOA
#define RCC_PCLK_SPIM1_HD RCC_APB2Periph_SPI1
IO 配置:
//--------------------------------------------------------------------------------------------------------
// 函 数 名: spi_gpio_init
// 功能说明: SPI 硬件IO初始化
// 形 参: spi_chl:SPIM 通道
// 返 回 值: 无
// 日 期: 2020-03-12
// 备 注:采用 Unix like 方式
// 作 者: by 霁风AI
//--------------------------------------------------------------------------------------------------------
void spi_gpio_init(uint8_t spi_chl)
{
GPIO_InitTypeDef gpio_config_init;
if (spi_chl == 1)
{
RCC_APB2PeriphClockCmd(RCC_PCLK_SPIM1_GPIO, ENABLE); //开启SPIM1 GPIO时钟、
// gpio_config_init.GPIO_Pin = SPIM1_CLK_IO | SPIM1_MISO_IO | SPIM1_MOSI_IO; //SPIM1_CLK_IO IO初始化
gpio_config_init.GPIO_Pin = SPIM1_CLK_IO | SPIM1_MOSI_IO;
gpio_config_init.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
gpio_config_init.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(SPIM1_GPIO_PORT, &gpio_config_init);
gpio_config_init.GPIO_Pin = SPIM1_MISO_IO; //SPIM1_MISO_IO IO初始化
gpio_config_init.GPIO_Mode = GPIO_Mode_IN_FLOATING; //MISO浮空输入
gpio_config_init.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(SPIM1_GPIO_PORT, &gpio_config_init);
GPIO_SetBits(SPIM1_GPIO_PORT, SPIM1_CLK_IO | SPIM1_MISO_IO | SPIM1_MOSI_IO); //IO初始状态都设置为高电平
}
}
2.2 初始化 SPI1,设置 SPI1 工作模式
接下来初始化 SPI1,设置 SPI1 为主机模式,设置数据格式为 8 位,然设置 SCK 时钟极性及采样方式。并设置 SPI1 的时钟频率(最大 18Mhz),以及数据的格式(MSB 在前还是 LSB 在前)。这在库函数中是通过 SPI_Init 函数来实现。
函数原型:
void SPI_Init(SPI_TypeDef* SPIx, SPI_InitTypeDef* SPI_InitStruct);
第一个参数是 SPI 标号,第二个参数结构体类型 SPI_InitTypeDef 为相关属性设置。
SPI_InitTypeDef 的定义如下:
typedef struct
{
uint16_t SPI_Direction;
uint16_t SPI_Mode;
uint16_t SPI_DataSize;
uint16_t SPI_CPOL;
uint16_t SPI_CPHA;
uint16_t SPI_NSS;
uint16_t SPI_BaudRatePrescaler;
uint16_t SPI_FirstBit;
uint16_t SPI_CRCPolynomial;
}SPI_InitTypeDef;
| 参数 | 解释 |
|---|---|
| SPI_Direction | 设置 SPI 的通信方式,可以选择为半双工,全双工,以及串行发和串行收方式 |
| SPI_Mode | 设置 SPI 的主从模式,主机模式 (SPI_Mode_Master),从机模式 (PI_Mode_Slave)。 |
| SPI_DataSiz | 数据为 8 位还是 16 位帧格式选择项。SPI_DataSize_8b(8 位),SPI_DataSize_16b (16位) |
| SPI_CPOL | 设置时钟极性 |
| SPI_CPHA | 设置时钟相位,也就是选择在串行同步时钟的第几个跳变沿(上升或下降)数据被采样,可以为第一个或者第二个条边沿采集 |
| SPI_NSS | 设置 NSS 信号由硬件(NSS 管脚)还是软件控制 |
| SPI_BaudRatePrescaler | 设置 SPI 波特率预分频值也就是决定 SPI 的时钟的参数 ,从不分频道 256 分频 8 个可选值 ,选择 256 分频值SPI_BaudRatePrescaler_256, 传输速度为 36M/256=140.625KHz。 |
| SPI_FirstBit | 设置数据传输顺序是 MSB 位在前还是 LSB 位在前。SPI_FirstBit_MSB (高位在前) |
| SPI_CRCPolynomial | 设置 CRC 校验多项式,提高通信可靠性,大于 1 即可 |
初始化的范例格式为:
//--------------------------------------------------------------------------------------------------------
// 函 数 名: spi_master_init
// 功能说明: SPI 硬件配置参数初始化
// 形 参: spi_chl:SPIM 通道
// 返 回 值: 无
// 日 期: 2020-03-12
// 备 注:采用 Unix like 方式
// 作 者: by 霁风AI
//--------------------------------------------------------------------------------------------------------
void spi_master_init(uint8_t spi_chl)
{
SPI_InitTypeDef spi_config_init;
#if 1
if(spi_chl == 1)
{
spi_flash_gpio_init(); //spi flash cs 初始化
// sd_gpio_init(); //spi sd cs 初始化
// nrf24l01_gpio_init();//spi nrf24l01 cs 初始化
spi_gpio_init(1); //spi gpio 初始化
RCC_APB2PeriphClockCmd(RCC_PCLK_SPIM1_HD, ENABLE); //SPI1时钟使能
spi_config_init.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //设置SPI单向或者双向的数据模式:SPI设置为双线双向全双工
spi_config_init.SPI_Mode = SPI_Mode_Master; //设置SPI工作模式:设置为主SPI
spi_config_init.SPI_DataSize = SPI_DataSize_8b; //设置SPI的数据大小:SPI发送接收8位帧结构
spi_config_init.SPI_CPOL = SPI_CPOL_Low; //选择了串行时钟的稳态:空闲时钟低
spi_config_init.SPI_CPHA = SPI_CPHA_1Edge; //数据捕获(采样)于第1个时钟沿
spi_config_init.SPI_NSS = SPI_NSS_Soft;//SPI_NSS_Soft; //NSS信号由硬件(NSS管脚)还是软件(使用SSI位)管理:内部NSS信号有SSI位控制
spi_config_init.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256; //定义波特率预分频的值:波特率预分频值为256
spi_config_init.SPI_FirstBit = SPI_FirstBit_MSB; //指定数据传输从MSB位还是LSB位开始:数据传输从MSB位开始
spi_config_init.SPI_CRCPolynomial = 7; //CRC值计算的多项式
SPI_Init(SPI1, &spi_config_init); //根据SPI_InitStruct中指定的参数初始化外设SPIx寄存器
SPI_Cmd(SPI1, ENABLE); //使能SPI外设
// spi_master_send_recv_byte(1, 0xFF); //启动传输
}
#endif
}
2.3 SPI 传输数据
通信接口需要有发送数据和接受数据的函数,固件库提供的发送数据函数原型为:
void SPI_I2S_SendData(SPI_TypeDef* SPIx, uint16_t Data);
往 SPIx 数据寄存器写入数据 Data,从而实现发送。
固件库提供的接受数据函数原型为:
uint16_t SPI_I2S_ReceiveData(SPI_TypeDef* SPIx) ;
这从 SPIx 数据寄存器读出接收到的数据。
收发单个字节数据:
//--------------------------------------------------------------------------------------------------------
// 函 数 名: spi_master_send_recv_byte
// 功能说明: SPI 收发数据
// 形 参: spi_chl:SPIM 通道
// send_byte:发送的数据
// 返 回 值: 无
// 日 期: 2020-03-14
// 备 注:采用 Unix like 方式
// 作 者: by 霁风AI
//--------------------------------------------------------------------------------------------------------
uint8_t spi_master_send_recv_byte(uint8_t spi_chl, uint8_t spi_byte)
{
uint8_t time = 0;
if (spi_chl == 1)
{
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET) //检查指定的SPI标志位设置与否:发送缓存空标志位
{
time++;
if(time>200)
{
return false;
}
}
SPI_I2S_SendData(SPI1, spi_byte); //通过外设SPIx发送一个数据
time = 0;
while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET)//检查指定的SPI标志位设置与否:接受缓存非空标志位
{
time++;
if(time>200)
{
return false;
}
}
return SPI_I2S_ReceiveData(SPI1); //返回通过SPIx最近接收的数据
}
else
{
return false;
}
}
收发多个字节数据:
//--------------------------------------------------------------------------------------------------------
// 函 数 名: spi_master_send_some_bytes
// 功能说明: SPI 发送多个字节数据
// 形 参: spi_chl:SPIM 通道
// pbdata:发送的数据首地址
// send_length:发送数据长度
// 返 回 值: 无
// 日 期: 2020-03-12
// 备 注:采用 Unix like 方式
// 作 者: by 霁风AI
//--------------------------------------------------------------------------------------------------------
void spi_master_send_some_bytes(uint8_t spi_chl, uint8_t *pbdata, uint16_t send_length)
{
uint16_t i = 0;
for (i = 0; i < send_length; i++)
{
spi_master_send_recv_byte(spi_chl, pbdata[i]);
}
// while (send_length--)
// {
// spi_master_send_byte(spi_chl, *pbdata++);
// }
}
//--------------------------------------------------------------------------------------------------------
// 函 数 名: spi_master_recv_some_bytes
// 功能说明: SPI 接收多个字节数据
// 形 参: spi_chl:SPIM 通道
// pbdata:接收的数据首地址
// send_length:接收数据长度
// 返 回 值: 无
// 日 期: 2020-03-12
// 备 注:采用 Unix like 方式
// 作 者: by 霁风AI
//--------------------------------------------------------------------------------------------------------
void spi_master_recv_some_bytes(uint8_t spi_chl, uint8_t *pbdata, uint16_t recv_length)
{
uint8_t *temp_data = pbdata;
while (recv_length--)
{
*temp_data++ = spi_master_send_recv_byte(spi_chl, 0xFF); //发送 0xff 为从设备提供时钟
}
}
2.4 查看 SPI 传输状态
在 SPI 传输过程中,要判断数据是否传输完成,发送区是否为空等等状态,
通过函数 SPI_I2S_GetFlagStatus 实现的,判断发送是否完成的方法是:
SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE);
3. SPI FLASH 操作
3.1 宏定义部分
#define FLASH_WRITE_ENABLE_CMD 0x06
#define FLASH_WRITE_DISABLE_CMD 0x04
#define FLASH_READ_SR_CMD 0x05
#define FLASH_WRITE_SR_CMD 0x01
#define FLASH_READ_DATA 0x03
#define FLASH_FASTREAD_DATA 0x0b
#define FLASH_WRITE_PAGE 0x02
#define FLASH_ERASE_PAGE 0x81
#define FLASH_ERASE_SECTOR 0x20
#define FLASH_ERASE_BLOCK 0xd8
#define FLASH_ERASE_CHIP 0xc7
#define FLASH_POWER_DOWN 0xb9
#define FLASH_RELEASE_POWER_DOWN 0xab
#define FLASH_READ_DEVICE_ID 0x90
#define FLASH_READ_JEDEC_ID 0x9f
#define FLASH_SIZE (1*1024*1024) // 1M字节
#define PAGE_SIZE 8192 // 256 bytes
#define SECTOR_SIZE 512 // 4-Kbyte
#define BLOCK_SIZE 32 // 64-Kbyte
#define PAGE_LEN 255 //一页256字节
3.2 中间层函数封装
注明: 此部分函数的封装是为了统一硬件 SPI 和软件模拟 SPI 接口。
//--------------------------------------------------------------------------------------------------------
// 函 数 名: hal_spi_send_bytes
// 功能说明: SPI 发送数据,包含软件和硬件通信方式
// 形 参: mode:通信方式选择(0:软件SPI;1:硬件SPI)
// pbdata:发送数据的首地址
// send_length:发送数据长度
// 返 回 值: 执行状态(true or false)
// 日 期: 2020-03-12
// 备 注: 中间层封装底层接口
// 作 者: by 霁风AI
//--------------------------------------------------------------------------------------------------------
uint8_t hal_spi_send_bytes(uint8_t mode, uint8_t *pbdata, uint16_t send_length)
{
if (mode == 0)
{
for (uint16_t i = 0; i < send_length; i++)
{
Spi_WriteByte(pbdata[i]);
}
return true;
}
else if (mode == 1)
{
spi_master_send_some_bytes(1, pbdata, send_length);
// for (uint16_t i = 0; i < send_length; i++)
// {
// spi_master_send_recv_byte(1, pbdata[i]);
// }
return true;
}
else
{
return false;
}
}
//--------------------------------------------------------------------------------------------------------
// 函 数 名: hal_spi_recv_bytes
// 功能说明: SPI 接收数据,包含软件和硬件通信方式
// 形 参: mode:通信方式选择(0:软件SPI;1:硬件SPI)
// pbdata:发送数据的首地址
// send_length:发送数据长度
// 返 回 值: 执行状态(true or false)
// 日 期: 2020-03-12
// 备 注: 中间层封装底层接口
// 作 者: by 霁风AI
//--------------------------------------------------------------------------------------------------------
uint8_t hal_spi_recv_bytes(uint8_t mode, uint8_t *pbdata, uint16_t recv_length)
{
if (mode == 0)
{
for (uint16_t i = 0; i < recv_length; i++)
{
*pbdata++ = Spi_ReadByte(); //软件模拟SPI
}
return true;
}
else if (mode == 1)
{
spi_master_recv_some_bytes(1, pbdata, recv_length); //硬件SPI
// for (uint16_t i = 0; i < recv_length; i++)
// {
// *pbdata++ = spi_master_send_recv_byte(1, 0xFF);
// }
return true;
}
else
{
return false;
}
}
关于软件模拟 SPI 部分代码,参看:软件模拟SPI代码 。此处不再贴出。
3.3 FLASH 部分
__align(4) uint8_t g_DataTmpBuffer[0x1000] = {0};
#define SectorBuf g_DataTmpBuffer
//--------------------------------------------------------------------------------------------------------
// 函 数 名: Flash_WriteEnable
// 功能说明: 写使能,置位 WEL 位 WEL 位(WEL-->1)
// 形 参: 无
// 返 回 值: 无
// 日 期: 2020-03-07
// 备 注:
// 作 者: by 霁风AI
//--------------------------------------------------------------------------------------------------------
void Flash_WriteEnable(void)
{
uint8_t command = FLASH_WRITE_ENABLE_CMD;
FLASH_CS_LOW;
hal_spi_send_bytes(SPI_COMM_MODE, &command, 1);//开启写使能
FLASH_CS_HIGH;
}
//--------------------------------------------------------------------------------------------------------
// 函 数 名: Flash_WriteDisable
// 功能说明: 写失能,复位 WEL 位(WEL-->0)
// 形 参: 无
// 返 回 值: 无
// 日 期: 2020-03-07
// 备 注:
// 作 者: by 霁风AI
//--------------------------------------------------------------------------------------------------------
void Flash_WriteDisable(void)
{
uint8_t command = FLASH_WRITE_DISABLE_CMD;
FLASH_CS_LOW;
hal_spi_send_bytes(SPI_COMM_MODE, &command, 1);
// Spi_WriteByte(FLASH_WRITE_DISABLE_CMD); //开启写失能 04h
FLASH_CS_HIGH;
}
//--------------------------------------------------------------------------------------------------------
// 函 数 名: Flash_WriteSR
// 功能说明: 读状态寄存器
// 形 参: 无
// 返 回 值: 无
// 日 期: 2020-03-07
// 备 注: 多用于检查 BUSY 位
// 作 者: by 霁风AI
//--------------------------------------------------------------------------------------------------------
uint8_t Flash_ReadSR(void)
{
uint8_t ucTmpVal = 0;
uint8_t command = FLASH_READ_SR_CMD;
FLASH_CS_LOW;
hal_spi_send_bytes(SPI_COMM_MODE, &command, 1); //05h
hal_spi_recv_bytes(SPI_COMM_MODE, &ucTmpVal, 1);
// ucTmpVal = Spi_ReadByte();
FLASH_CS_HIGH;
return ucTmpVal;
}
//--------------------------------------------------------------------------------------------------------
// 函 数 名: Flash_WriteSR
// 功能说明: 写状态寄存器
// 形 参: _ucByte:写入状态寄存器的数值
// 返 回 值: no
// 日 期: 2020-03-07
// 备 注:
// 作 者: by 霁风AI
//--------------------------------------------------------------------------------------------------------
void Flash_WriteSR(uint8_t _ucByte)
{
uint8_t command = FLASH_WRITE_SR_CMD;
Flash_WriteEnable();
Flash_WaitNobusy();
FLASH_CS_LOW;
hal_spi_send_bytes(SPI_COMM_MODE, &command, 1); //01h
hal_spi_send_bytes(SPI_COMM_MODE, &_ucByte, 1); //写入一个字节
FLASH_CS_HIGH;
}
//--------------------------------------------------------------------------------------------------------
// 函 数 名: Flash_WaitNobusy
// 功能说明: 检查 FLASH BUSY 位状态
// 形 参: no
// 返 回 值: no
// 日 期: 2020-03-07
// 备 注: 调用Flash_ReadSR(),判断状态寄存器的R0位,执行结束操作清零
// 作 者: by 霁风AI
//--------------------------------------------------------------------------------------------------------
void Flash_WaitNobusy(void)
{
//FLASH_READ_SR_CMD 指令的发送,有的FLASH仅需发送一次,FLASH自动回复,有的FLASH无法自动回复,需要循环一直发送等待
while(((Flash_ReadSR()) & 0x01)==0x01); //等待BUSY位清空
}
//--------------------------------------------------------------------------------------------------------
// 函 数 名: Flash_FastReadByte
// 功能说明: flash 都数据(快速读取:Fast read operate at the highest poossible frequency)
// 形 参: ucpBuffer:数据存储区首地址
// _ulReadAddr: 要读出Flash的首地址
// _usNByte: 要读出的字节数(最大65535B)
// 返 回 值: no
// 日 期: 2020-03-07
// 备 注: 从_ulReadAddr地址,连续读出_usNByte长度的字节
// 作 者: by 霁风AI
//--------------------------------------------------------------------------------------------------------
void Flash_ReadSomeBytes(uint8_t *ucpBuffer, uint32_t _ulReadAddr, uint16_t _usNByte)
{
uint8_t command = FLASH_READ_DATA;
uint8_t temp_buff[3] = {0};
temp_buff[0] = (uint8_t)(_ulReadAddr >> 16);
temp_buff[1] = (uint8_t)(_ulReadAddr >> 8);
temp_buff[2] = (uint8_t)(_ulReadAddr >> 0);
FLASH_CS_LOW;
hal_spi_send_bytes(SPI_COMM_MODE, &command, 1);
hal_spi_send_bytes(SPI_COMM_MODE, &temp_buff[0], 1);
hal_spi_send_bytes(SPI_COMM_MODE, &temp_buff[1], 1);
hal_spi_send_bytes(SPI_COMM_MODE, &temp_buff[2], 1);
hal_spi_recv_bytes(SPI_COMM_MODE, ucpBuffer, _usNByte);
// Spi_WriteByte(FLASH_READ_DATA); //连续读取数据 03h
// Spi_WriteByte((uint8_t)(_ulReadAddr>>16)); //写入24位地址
// Spi_WriteByte((uint8_t)(_ulReadAddr>>8));
// Spi_WriteByte((uint8_t)(_ulReadAddr>>0));
// while(_usNByte--)
// {
// *ucpBuffer = Spi_ReadByte();
// ucpBuffer++;
// }
FLASH_CS_HIGH;
}
//--------------------------------------------------------------------------------------------------------
// 函 数 名: Flash_FastReadByte
// 功能说明: flash 都数据(快速读取:Fast read operate at the highest poossible frequency)
// 形 参: ucpBuffer:数据存储区首地址
// _ulReadAddr: 要读出Flash的首地址
// _usNByte: 要读出的字节数(最大65535B)
// 返 回 值: no
// 日 期: 2020-03-07
// 备 注: 从_ulReadAddr地址,连续读出_usNByte长度的字节
// 作 者: by 霁风AI
//--------------------------------------------------------------------------------------------------------
void Flash_FastReadByte(uint8_t *ucpBuffer, uint32_t _ulReadAddr, uint16_t _usNByte)
{
uint8_t command = FLASH_FASTREAD_DATA;
uint8_t temp_buff[3] = {0};
temp_buff[0] = (uint8_t)(_ulReadAddr >> 16);
temp_buff[1] = (uint8_t)(_ulReadAddr >> 8);
temp_buff[2] = (uint8_t)(_ulReadAddr >> 0);
FLASH_CS_LOW;
hal_spi_send_bytes(SPI_COMM_MODE, &command, 1);
hal_spi_send_bytes(SPI_COMM_MODE, &temp_buff[0], 1);
hal_spi_send_bytes(SPI_COMM_MODE, &temp_buff[1], 1);
hal_spi_send_bytes(SPI_COMM_MODE, &temp_buff[2], 1);
hal_spi_recv_bytes(SPI_COMM_MODE, ucpBuffer, _usNByte);
// Spi_WriteByte(FLASH_FASTREAD_DATA);//快速读取数据 0bh
// Spi_WriteByte((uint8_t)(_ulReadAddr>>16));//写入24位地址
// Spi_WriteByte((uint8_t)(_ulReadAddr>>8));
// Spi_WriteByte((uint8_t)(_ulReadAddr>>0));
// Spi_WriteByte(0xFF);//等待8个时钟(dummy byte)
// while(_usNByte--)
// {
// *ucpBuffer = Spi_ReadByte();
// ucpBuffer++;
// }
FLASH_CS_HIGH;
}
//--------------------------------------------------------------------------------------------------------
// 函 数 名: Flash_WritePage
// 功能说明: flash 写数据(按页写入,一页256字节,写入之前FLASH地址上必须为0xFF)
// 形 参: ucpBuffer:数据存储区首地址
// _ulWriteAddr: 要读写入Flash的首地址
// _usNByte: 要写入的字节数(最大65535B = 64K 块)
// 返 回 值: no
// 日 期: 2020-03-07
// 备 注: _ulWriteAddr,连续写入_usNByte长度的字节
// 作 者: by 霁风AI
//--------------------------------------------------------------------------------------------------------
void Flash_WritePage(uint8_t *ucpBuffer, uint32_t _ulWriteAddr, uint16_t _usNByte)
{
uint8_t command = FLASH_WRITE_PAGE;
uint8_t temp_buff[3] = {0};
temp_buff[0] = (uint8_t)(_ulWriteAddr >> 16);
temp_buff[1] = (uint8_t)(_ulWriteAddr >> 8);
temp_buff[2] = (uint8_t)(_ulWriteAddr >> 0);
Flash_WriteEnable(); //写使能
Flash_WaitNobusy(); //等待写入结束
FLASH_CS_LOW;
hal_spi_send_bytes(SPI_COMM_MODE, &command, 1);
hal_spi_send_bytes(SPI_COMM_MODE, &temp_buff[0], 1);
hal_spi_send_bytes(SPI_COMM_MODE, &temp_buff[1], 1);
hal_spi_send_bytes(SPI_COMM_MODE, &temp_buff[2], 1);
hal_spi_send_bytes(SPI_COMM_MODE, ucpBuffer, _usNByte);
// Spi_WriteByte(FLASH_WRITE_PAGE); //02h
// Spi_WriteByte((uint8_t)(_ulWriteAddr>>16)); //写入24位地址
// Spi_WriteByte((uint8_t)(_ulWriteAddr>>8));
// Spi_WriteByte((uint8_t)(_ulWriteAddr>>0));
// while(_usNByte--)
// {
// Spi_WriteByte(*ucpBuffer); //SPI 写入单个字节
// ucpBuffer++;
// }
FLASH_CS_HIGH;
Flash_WaitNobusy(); //等待写入结束
}
//--------------------------------------------------------------------------------------------------------
// 函 数 名: Flash_WriteNoCheck
// 功能说明: flash 写数据(不带擦除,写入之前必须确保写入部分FLASH的数据全为0xFf,否则写入失败)
// 形 参: ucpBuffer:数据存储区首地址
// _ulWriteAddr: 要读写入Flash的首地址
// _usNByte: 要写入的字节数(最大65535B = 64K 块)
// 返 回 值: no
// 日 期: 2020-03-07
// 备 注: _ulWriteAddr,连续写入_usNByte长度的字节,程序带FLASH数据检查写入
// 作 者: by 霁风AI
//--------------------------------------------------------------------------------------------------------
void Flash_WriteNoCheck(uint8_t *ucpBuffer, uint32_t _ulWriteAddr, uint16_t _usNByte)
{
uint16_t PageByte = 256 - _ulWriteAddr % 256;//单页剩余可写字节数
if(_usNByte <= PageByte) //不大于256字节
{
PageByte = _usNByte;
}
while(1)
{
Flash_WritePage(ucpBuffer, _ulWriteAddr, PageByte);
if(_usNByte == PageByte) //写入结束
break;
else
{
ucpBuffer += PageByte; //下一页写入的数据
_ulWriteAddr += PageByte; //下一页写入的地址
_usNByte -= PageByte; //待写入的字节数递减
if(_usNByte > 256)
{
PageByte = 256;
}
else
{
PageByte = _usNByte;
}
}
}
}
//--------------------------------------------------------------------------------------------------------
// 函 数 名: Flash_WriteSomeBytes
// 功能说明: flash 写数据
// 形 参: ucpBuffer:数据存储区首地址
// _ulWriteAddr: 要读写入Flash的首地址
// _usNByte: 要写入的字节数(最大65535B = 64K 块)
// 返 回 值: no
// 日 期: 2020-03-07
// 备 注: _ulWriteAddr,连续写入_usNByte长度的字节,程序带FLASH数据检查写入
// 作 者: by 霁风AI
//--------------------------------------------------------------------------------------------------------
void Flash_WriteSomeBytes(uint8_t *ucpBuffer, uint32_t _ulWriteAddr, uint16_t _usNByte)
{
uint32_t ulSecPos = 0; //得到扇区位置
uint16_t usSecOff = 0; //扇区偏移
uint16_t usSecRemain = 0; //剩余扇区
uint32_t i = 0;
ulSecPos = _ulWriteAddr / 4096;//地址所在扇区(0--511)
usSecOff = _ulWriteAddr % 4096;//扇区内地址偏移
usSecRemain = 4096 - usSecOff;//扇区除去偏移,还剩多少字节
if(_usNByte <= usSecRemain) //写入数据大小 < 剩余扇区空间大小
{
usSecRemain = _usNByte;
}
while(1)
{
Flash_ReadSomeBytes(SectorBuf, ulSecPos*4096, 4096);//读出整个扇区的内容
for (i = 0; i < usSecRemain; i++) //校验数据
{
if (SectorBuf[usSecOff + i] != 0xFF)//储存数据不为0xFF,需要擦除
break;
}
if(i < usSecRemain) //需要擦除
{
Flash_EraseSector(ulSecPos); //擦除这个扇区
for(i = 0; i < usSecRemain; i++) //保存写入的数据
{
SectorBuf[usSecOff + i] = ucpBuffer[i];
}
Flash_WriteNoCheck(SectorBuf, ulSecPos*4096, 4096); //写入整个扇区(扇区=老数据+新写入数据)
}
else
{
Flash_WriteNoCheck(ucpBuffer, _ulWriteAddr, usSecRemain);//不需要擦除,直接写入扇区
}
if(_usNByte == usSecRemain) //写入结束
{
Flash_WriteDisable();
break;
}
else
{
ulSecPos++; //扇区地址增加1
usSecOff = 0; //扇区偏移归零
ucpBuffer += usSecRemain; //指针偏移
_ulWriteAddr += usSecRemain; //写地址偏移
_usNByte -= usSecRemain; //待写入的字节递减
if(_usNByte > 4096)
{
usSecRemain = 4096; //待写入一扇区(4096字节大小)
}
else
{
usSecRemain = _usNByte; //待写入少于一扇区的数据
}
}
}
}
//--------------------------------------------------------------------------------------------------------
// 函 数 名: Flash_ErasePage
// 功能说明: flash erase page
// 形 参: no
// 返 回 值: no
// 日 期: 2020-03-07
// 备 注: 有的 FLASH 支持
// 作 者: by 霁风AI
//--------------------------------------------------------------------------------------------------------
void Flash_ErasePage(uint32_t _ulPageAddr)
{
_ulPageAddr *= 256;
Flash_WriteEnable();
Flash_WaitNobusy();
FLASH_CS_LOW;
Spi_WriteByte(FLASH_ERASE_PAGE); //页擦除指令
Spi_WriteByte((uint8_t)(_ulPageAddr>>16)); //写入24位地址
Spi_WriteByte((uint8_t)(_ulPageAddr>>8));
Spi_WriteByte((uint8_t)(_ulPageAddr>>0));
FLASH_CS_HIGH;
Flash_WaitNobusy(); //等待写入结束
}
//--------------------------------------------------------------------------------------------------------
// 函 数 名: Flash_EraseSector
// 功能说明: flash erase sector
// 形 参: no
// 返 回 值: no
// 日 期: 2020-03-07
// 备 注: 1扇区 = 4K Bytes
// 作 者: by 霁风AI
//--------------------------------------------------------------------------------------------------------
void Flash_EraseSector(uint32_t _ulSectorAddr)
{
uint8_t command = FLASH_ERASE_SECTOR;
uint8_t temp_buff[3] = {0};
temp_buff[0] = (uint8_t)(_ulSectorAddr >> 16);
temp_buff[1] = (uint8_t)(_ulSectorAddr >> 8);
temp_buff[2] = (uint8_t)(_ulSectorAddr >> 0);
_ulSectorAddr *= 4096; //1个扇区 4 KBytes
Flash_WriteEnable();
Flash_WaitNobusy();
FLASH_CS_LOW;
hal_spi_send_bytes(SPI_COMM_MODE, &command, 1);
hal_spi_send_bytes(SPI_COMM_MODE, &temp_buff[0], 1);
hal_spi_send_bytes(SPI_COMM_MODE, &temp_buff[1], 1);
hal_spi_send_bytes(SPI_COMM_MODE, &temp_buff[2], 1);
// Spi_WriteByte(FLASH_ERASE_SECTOR); //20h
// Spi_WriteByte((uint8_t)(_ulSectorAddr>>16)); //写入24位地址
// Spi_WriteByte((uint8_t)(_ulSectorAddr>>8));
// Spi_WriteByte((uint8_t)(_ulSectorAddr));
FLASH_CS_HIGH;
Flash_WaitNobusy(); //等待写入结束
}
//--------------------------------------------------------------------------------------------------------
// 函 数 名: Flash_EraseBlock
// 功能说明: flash erase block
// 形 参: no
// 返 回 值: no
// 日 期: 2020-03-07
// 备 注: 1块 = 64K Bytes
// 作 者: by 霁风AI
//--------------------------------------------------------------------------------------------------------
void Flash_EraseBlock(uint32_t _ulBlockAddr)
{
uint8_t command = FLASH_ERASE_BLOCK;
_ulBlockAddr *= 65536; //块地址,一块64K
Flash_WriteEnable();
Flash_WaitNobusy();
FLASH_CS_LOW;
hal_spi_send_bytes(SPI_COMM_MODE, &command, 1);
hal_spi_send_bytes(SPI_COMM_MODE, (uint8_t *)(_ulBlockAddr>>16), 1);
hal_spi_send_bytes(SPI_COMM_MODE, (uint8_t *)(_ulBlockAddr>>8), 1);
hal_spi_send_bytes(SPI_COMM_MODE, (uint8_t *)(_ulBlockAddr>>0), 1);
// Spi_WriteByte(FLASH_ERASE_BLOCK); //d8h
// Spi_WriteByte((uint8_t)(_ulBlockAddr>>16)); //写入24位地址
// Spi_WriteByte((uint8_t)(_ulBlockAddr>>8));
// Spi_WriteByte((uint8_t)(_ulBlockAddr));
FLASH_CS_HIGH;
Flash_WaitNobusy(); //等待写入结束
}
//--------------------------------------------------------------------------------------------------------
// 函 数 名: Flash_EraseChip
// 功能说明: flash erase chip , it makes flash recovery FF
// 形 参: no
// 返 回 值: no
// 日 期: 2020-03-07
// 备 注: 软件模拟SPI
// 作 者: by 霁风AI
//--------------------------------------------------------------------------------------------------------
void Flash_EraseChip(void)
{
uint8_t command = FLASH_ERASE_CHIP;
Flash_WriteEnable(); //flash芯片写使能
Flash_WaitNobusy(); //等待写操作完成
FLASH_CS_LOW;
hal_spi_recv_bytes(SPI_COMM_MODE, &command, 1);
// Spi_WriteByte(FLASH_ERASE_CHIP); //c7h
FLASH_CS_HIGH;
Flash_WaitNobusy(); //等待写入结束
}
//--------------------------------------------------------------------------------------------------------
// 函 数 名: Flash_PowerDown
// 功能说明: flash into power down mode
// 形 参: no
// 返 回 值: no
// 日 期: 2020-03-07
// 备 注: 软件模拟SPI
// 作 者: by 霁风AI
//--------------------------------------------------------------------------------------------------------
void Flash_PowerDown(void)
{
uint8_t command = FLASH_POWER_DOWN;
FLASH_CS_LOW;
hal_spi_send_bytes(SPI_COMM_MODE, &command, 1);
// Spi_WriteByte(FLASH_POWER_DOWN); //b9h
FLASH_CS_HIGH;
Sys_delay_us(3); // cs go high , need to delay 3us
}
//--------------------------------------------------------------------------------------------------------
// 函 数 名: Flash_WakeUp
// 功能说明: wake up flash from power down mode or hign performance mode
// 形 参: no
// 返 回 值: no
// 日 期: 2020-03-07
// 备 注: 软件模拟SPI
// 作 者: by 霁风AI
//--------------------------------------------------------------------------------------------------------
void Flash_WakeUp(void)
{
uint8_t command = FLASH_RELEASE_POWER_DOWN;
FLASH_CS_LOW;
hal_spi_send_bytes(SPI_COMM_MODE, &command, 1);
// Spi_WriteByte(FLASH_RELEASE_POWER_DOWN);//abh
FLASH_CS_HIGH;
Sys_delay_us(3); //CS go high , need delay 3us
}
//--------------------------------------------------------------------------------------------------------
// 函 数 名: Flash_ReadDeviceID
// 功能说明: 读取FLASH ID(manufacturer ID-1Byte + Device ID-2Byte:type+density)
// 形 参: 无
// 返 回 值: ulJedId:FLASH ID 3字节
// 日 期: 2020-03-06
// 备 注: 软件模拟SPI
// 作 者: by 霁风AI
//--------------------------------------------------------------------------------------------------------
uint16_t Flash_ReadDeviceID(void)
{
uint8_t command = FLASH_READ_DEVICE_ID;
uint16_t usFlashId = 0;
uint8_t temp_buff[3] = {0};
FLASH_CS_LOW;
hal_spi_send_bytes(SPI_COMM_MODE, &command, 1); //90h
hal_spi_send_bytes(SPI_COMM_MODE, temp_buff, 3); //写入24位地址;假地址
hal_spi_recv_bytes(SPI_COMM_MODE, temp_buff, 2);
// Spi_WriteByte(FLASH_READ_DEVICE_ID); //90h
// Spi_WriteByte(0x00);//写入24位地址;假地址
// Spi_WriteByte(0x00);
// Spi_WriteByte(0x00); //如果0x01,先输出 Device ID
// usFlashId |= Spi_ReadByte()<<8;
// usFlashId |= Spi_ReadByte();
FLASH_CS_HIGH;
usFlashId = (uint16_t)(temp_buff[0] << 8) | (temp_buff[1] << 0);
return usFlashId;
}
//--------------------------------------------------------------------------------------------------------
// 函 数 名: Flash_ReadJEDECID
// 功能说明: 读取FLASH ID(manufacturer ID-1Byte + Device ID-2Byte:type+density)
// 形 参: 无
// 返 回 值: ulJedId:FLASH ID 3字节
// 日 期: 2020-03-06
// 备 注: 软件模拟SPI
// 作 者: by 霁风AI
//--------------------------------------------------------------------------------------------------------
uint32_t Flash_ReadJEDECID(void)
{
uint8_t command = FLASH_READ_JEDEC_ID;
uint32_t flash_jed_id = 0;
uint8_t recv_buff[3] = {0};
FLASH_CS_LOW;
hal_spi_send_bytes(SPI_COMM_MODE, &command, 1); //9fh
hal_spi_recv_bytes(SPI_COMM_MODE, recv_buff, 3);
FLASH_CS_HIGH;
flash_jed_id = (recv_buff[0] << 16) | (recv_buff[1] << 8) | (recv_buff[2] << 0);
return flash_jed_id;
}
参考:
1.原子库函数手册
2.SPI—读写串行 FLASH