SSD(Single Shot MultiBox Detector)算法理解
1、算法概述
SSD(Single Shot MultiBox Detector)是ECCV2016的一篇文章,属于one - stage套路。在保证了精度的同时,又提高了检测速度,相比当时的Yolo和Faster R-CNN是最好的目标检测算法了,可以达到实时检测的要求。在Titan X上,SSD在VOC2007数据集上的mAP值为74.3%,检测速度为59fps。
SSD算法在传统的基础网络(比如VGG)后添加了5个特征图尺寸依次减小的卷积层,对5个特征图的输入分别采用2个不同的3*3的卷积核进行卷积,一个输出分类用给的confidence,每个default box生成21个类别的confidence;一个输出回归用的localization,每个default box生成4个坐标值,最后将5个特征图上的结果合并(Contact),送入loss层。
多说一句:SSD算法是我平常用的最多的检测算法,但有一个问题是对小目标,尤其是密集小目标的检测效果不好,而且有时检测结果中会出现重叠框。但是对于一般的检测目标,比如车牌、行人和验证码什么的,检测准确率还是很高的。而且其检测速度达59FPS比Faster R-CNN系列高了很多,对检测速度有要求的任务场景首选SSD算法。
2、SSD算法特色
(1)在基础网络(VGG)后添加了辅助性的层进行多尺度卷积图的预测结果融合;
(2)提出了类似Anchor的Default boxes,解决了输入图像目标大小尺寸不同的问题,同时提高了精度,可以理解为一种特征金字塔;
(3)相比于Faster R-CNN,SSD提出了一个彻底的end to end的训练网络,保证了精度的同时大幅度提高了检测速度,且对低分辨率的输入图像的效果很好;
3、具体细节
3.1 添加辅助层结构
具体结构图如下图所示:
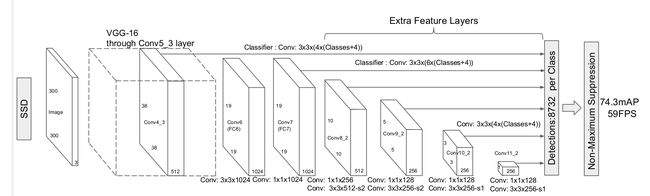
将VGG19的FC6和FC7改成卷积层,又在后面添加了三个尺寸大小逐级减小的卷积层和一个平均池化层。具体用于分类回归的层有:Conv4_3、Conv7、Conv8_2、Conv9_2、Conv10_2和Pool11。最后contact后传给loss层。利用不同层次的特征图来预测offset和confidence,可以检测不同尺寸的物体。
3.2 Default box
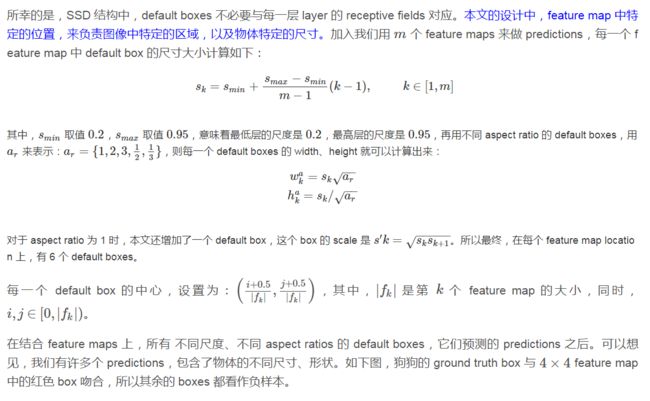
是文章的核心部分。这一部分的讲解具体可以看这篇博客:https://www.cnblogs.com/xuanyuyt/p/7447111.html。default box如下图所示:

feature map被分成了许多小格子,如4*4、8*8等,每一个格子是feature map的一个cell。每一个feature map的cell上都有一系列固定大小的不同尺寸的box,叫default box,上图中虚线的矩形框就是default box。坐标的类别的预测都是基于default box(代码中似乎在default box的基础上进行了处理编程了prior box)预测的。假设每个feature map的大小是m*n,即feature map的cell为m*n个,每一个default box都要预测C个类别的score和4个offset,假设每个feature map对应K个default box,则这张m*n大小的feature map上要产生m*n*K*(4+c)个输出,这也意味着在这张m*n大小的特征图上需要用m*n*k*(c+4)个3*3的卷积核去卷积得到最后的m*n*K*(4+c)个输出。当然这些feature map是3.1中提到的参与最终回归预测的5个层。每一个m*n*K*(4+c)个输出都对应一个3*3的卷积核,对上面的5个层的输出全部都执行上述3*3的卷积操作后,将得到的特征图合并(采用类似Inception模块里的Contact,是通道合并而不是卷积图对应的数值相加)。
default box的尺寸选择(摘自博客:https://blog.csdn.net/u010167269/article/details/52563573):
3.3 Matching Strategy
这一步是说训练需要的default box如何与GT框匹配的问题。MultiBox中用的是best jaccard overlap来配对,jaccard overlap跟IOU的概念类似,都是交集比上并集。MultiBox中采用jaccard overlap最大值的default box与GT(Ground Truth)配对。SSD中只要jaccard overlap大于0.5的default box都可以看做是正样本,因此一个GT可以与多个default box配对。当然,小于0.5的default box就看做是负例了。
3.4 Hard Negative Mining
经过上述的Matching Strategy可能产生多个与GT匹配的正样例的和数量更多的负例。负样例的数目远远多于正样例的数目,使正负样例数目不平衡,导致训练难以收敛。解决方法是:选取负样例的default box,将他们的得分从大大小进行排序,选取的得分最高的前几个负样例的default box,最终使正负样例比例为1:3。
3.5 损失函数
损失函数由分类和回归两部分组成,具体可参考博客:https://www.cnblogs.com/xuanyuyt/p/7447111.html

参数解释:
(1)x: 令i表示第i个默认框,j表示第j个真实框,p表示第p个类,xi,j p={0,1}表示第i个prior box与类别p的第j个GT相匹配的jaccard overlap系数,若不匹配,则系数为0;
(2)c: 类别分类的置信值;
(3)l: 预测框参数,即box的中心坐标位置和box的宽和高;
(4)g:GT框的参数,同上;
(5)N:与阈值大于0.5的GT框相匹配的default box(prior box)的个数;
(6)a(阿尔法):权重项,在prototxt中设置loc_weight对应权重项,默认为1。实际问题中检查对于你的样本,回归和分类问题哪个更难,调整loc_weight来训练。Lloc是Faster R-CNN中的Smooth L1 loss,Lconf是Softmax Loss。
3.6 Data Augmentation
对每张训练图像做如下的数据增广:
(1)采用原始图像;
(2)在原图的基础上随机采样一个patch, jaccard overlap的值随机为{0.1, 0.3, 0.5, 0.7, 0.9};
(3)在原图的基础上随机采样一个patch,采样的patch的scale随机在【0.1, 1】中取,aspect ratio随机在【1/2, 2】之间取;
这样一个样本被上面3个batch_sampler采样器采样后会生成多个候选样本,然后从中随机选一个样本送入网络中训练。
测试时由于会产生大量的Bounding boxes,采用NMS(非极大值抑制),阈值设置为0.01。
具体的实验结果请看论文,需要注意的是,论文在最后关于小目标的识别也做了对应的Data Augmentation。
参考博客:
https://blog.csdn.net/u010167269/article/details/52563573
https://www.cnblogs.com/xuanyuyt/p/7447111.html
推荐一篇SSD使用的教学博客:
https://blog.csdn.net/u014696921/article/details/53353896