ZYNQ基本使用(1) PS的UART基本使用
目录
PS_UART
UART控制器简介
UART的MIO和EMIO管脚信号
设计指导
UART启动顺序
配置控制器功能
发送数据
接收数据
RXFIFO触发等级中断
寄存器概述
硬件系统
软件系统
基本使用
参考
PS_UART
UART控制器简介
UG585 – ch.19: UART Controller
ZYNQ的PS端有两个全双工异步串口收发器,支持广泛的可编程的波特率和I/O信号格式。
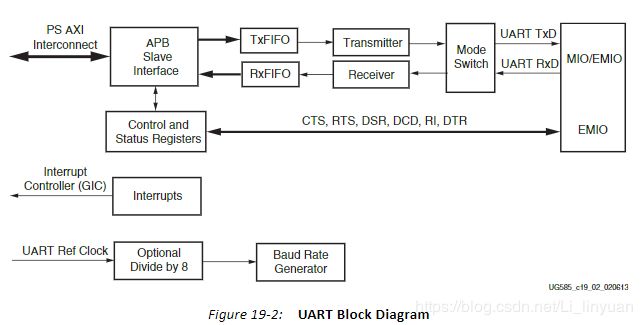
UART受配置寄存器和模式寄存器控制。独立的收发路径各自有一个64KB的FIFO,和一个模式开关支持配置回环。
UART0和UART1支持同样的特性。
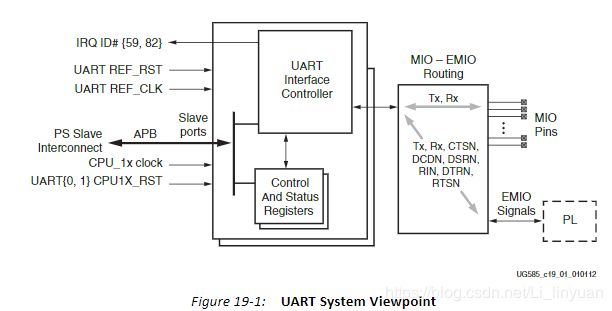
模块示意图
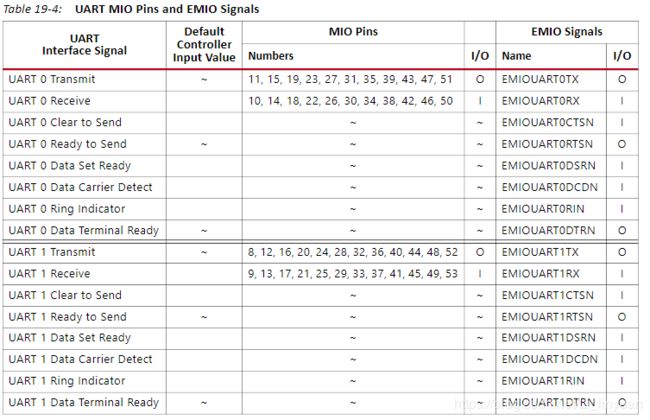
UART的MIO和EMIO管脚信号
设计指导
UART启动顺序
- 复位控制器;
- 配置I/O信号路由。Rx/Tx可使用MIO/EMIO。调制解调控制信号仅在EMIO接口可用;
- 配置UART参考时钟UART_Ref_Clk;
- 配置控制器功能;
- 配置中断;中断用于管理Tx/Rx FIFOs在所有模式下。
- 配置调制解调控制(可选);轮询和中断驱动选项。
- 管理收发数据。支持轮询Polling和中断Interrupt方式驱动。
配置控制器功能
这些示例配置字符帧、波特率、FIFO触发等级、RX超时机制和控制器使能。
所有的这些步骤必须的复位后完成,但在使能和关闭控制器之间不必要。
- 配置UART字符帧。
- 配置波特率。
- 设置RxFIFO出发等级。
- 使能控制器。
- 配置接收器超时机制。
发送数据
软件可以使用轮询polling或中断interrupt控制TxFIFO和RxFIFO数据流。
使用轮询polling方式
- 检查TxFIFO是否空;
- 写数据到TxFIFO;写64B数据
- 写更多数据。
- 检查TxFIFO是否有空间写下个B数据。
- 检查TxFIFO是否空。
使用中断interrupt方式
- 无效TxFIFO空中断。
- 写数据到TxFIFO;写64B数据;
- 检查TxFIFO是否有空间写下一个B数据;
- 重复步骤2和3;
- 使能中断;
- 等待直到TxFIFO为空。
接收数据
使用轮询方式
- 等待,直到RxFIFO被填充到触发数量级;
- 读RxFIFO数据。
- 重复步骤2直到FIFO空;
- 清除标志,如果Rx超时中断被触发。
使用中断方式
- 使能中断;
- 等待,直到RxFIFO被填充到触发数量级或Rx超时;;
- 读RxFIFO数据;
- 重复步骤2和3直到FIFO空;
- 清除标志,如果Rx超时中断被触发。
RXFIFO触发等级中断
设置RxFIFO触发等级和使能中断
- 配置触发等级;
- 使能RTIRG中断;
- 无效RTIRG中断;
- 清除RTRIG中断标志。
寄存器概述
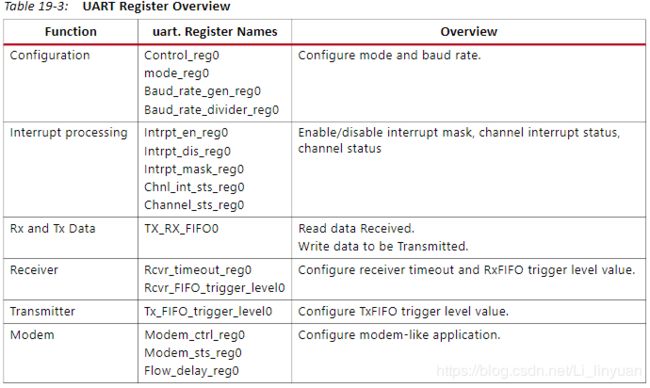
以上图文来源ug585 ch19
硬件系统
还是使用PS最小系统,仅使用UART1
软件系统
基本使用
在BSP界面选择导入示例工程
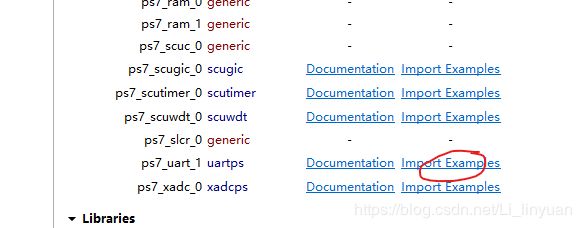
选择hello_world_example和selftest_example导入
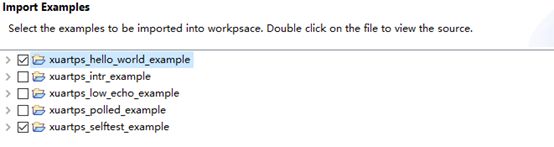
在Explorer窗口可以看到导入的项目,以及代码主循环

两个工程可以直接编译运行,自测试和打印输出。
从两个示例工程代码可以看到四个主要基本函数,初始化、自测试和发送。
打开xuartps.h可以看到Vitis提供的函数
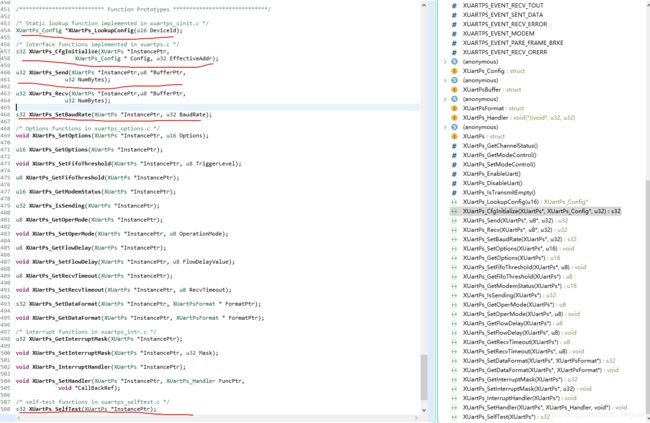
示例工程中使用的函数都在这里声明。
建立新的项目,添加几个.c和.h 文件。
代码如下
/*
* uart_main.c
*
* Created on: 2020/2/20
* Author: liny
*/
/***************************** Include Files *********************************/
#include "uart_ps.h"
/************************** Variable Definitions *****************************/
XUartPs Uart_Ps; /* The instance of the UART Driver */
/*****************************************************************************\
* Main function to call the Hello World example.
* @param None
* @return
* - XST_FAILURE if the Test Failed .
* - A non-negative number indicating the number of characters
* sent.
* @note None
\*****************************************************************************/
int main(void)
{
u8 SendBuf[] = "Hello World!\n";
u8 RecvBuf[255] ;
int Status ;
u32 RecvCount =0;
/* PS UART1 Initialization */
Status = Uart_Init(&Uart_Ps, UART1_PS_DEVICE_ID);
if (Status != XST_SUCCESS) {
xil_printf("Uart PS initialization failed!%d\n",1);
return XST_FAILURE;
}
else{
xil_printf("Uart PS initialization completed!\r\n");
}
xil_printf("length : %d \n", (sizeof(SendBuf) ));
/* forever transmit */
while(1){
sleep(1);
//Status = Uart_Send(&Uart_Ps, SendBuf, (sizeof(SendBuf)));
//xil_printf("SendCount : %d \n", Status );
RecvCount = Uart_Recv(&Uart_Ps, RecvBuf, 16);
Status = Uart_Send(&Uart_Ps, RecvBuf, RecvCount);
}
/* Never */
return Status;
}
/*
* uart.c
*
* Created on: 2020/02/20
* Author: liny
*/
#include "uart_ps.h"
/************************** Function Definition ******************************/
/*************************** Device Initialize *******************************/
int Uart_Init(XUartPs* Uart_Ps, u16 DeviceId){
int Status;
XUartPs_Config *Config;
/*
* Initialize the UART driver so that it's ready to use
* Look up the configuration in the config table,
* then initialize it.
*/
Config = XUartPs_LookupConfig(DeviceId);
if (NULL == Config) {
return XST_FAILURE;
}
Status = XUartPs_CfgInitialize(Uart_Ps, Config, Config->BaseAddress);
if (Status != XST_SUCCESS) {
return XST_FAILURE;
}
/* Perform a self-test to check hardware build. */
Status = XUartPs_SelfTest(Uart_Ps);
if (Status != XST_SUCCESS) {
return XST_FAILURE;
}
/* Set BaudRate */
XUartPs_SetBaudRate(Uart_Ps, 115200);
return XST_SUCCESS;
}
/******************************* Date Send ***********************************/
int Uart_Send(XUartPs* Uart_Ps, u8 *sendbuf, int length){
int SentCount = 0;
//while (SentCount < length - 1) {
while (SentCount < length ) {
/* Transmit the data */
SentCount += XUartPs_Send(Uart_Ps,
&sendbuf[SentCount], 1);
}
return SentCount;
}
/******************************* Date Recv ***********************************/
u32 Uart_Recv(XUartPs* Uart_Ps, u8 *recvbuf, u32 length){
u32 RecvCount = 0;
//u32 XUartPs_Recv(XUartPs *InstancePtr, u8 *BufferPtr, u32 NumBytes)
RecvCount = XUartPs_Recv(Uart_Ps, recvbuf, length);
return RecvCount;
}
/*
* uart_ps.h
*
* Created on: 2020/02/20
* Author: liny
*/
#ifndef SRC_UART_PS_H_
#define SRC_UART_PS_H_
/***************************** Include Files *********************************/
#include "xparameters.h"
#include "xuartps.h"
#include "xil_printf.h"
#include "sleep.h"
/**************************** Constant Define ********************************/
#define UART1_PS_DEVICE_ID XPAR_PS7_UART_1_DEVICE_ID
/************************** Function Prototypes ******************************/
int Uart_Init(XUartPs* Uart_Ps, u16 DeviceId);
int Uart_Send(XUartPs* Uart_Ps, u8 *sendbuf, int length);
u32 Uart_Recv();
#endif /* SRC_UART_PS_H_ */
Debug模式下运行,通过接收一定长度的数据,进行回发。
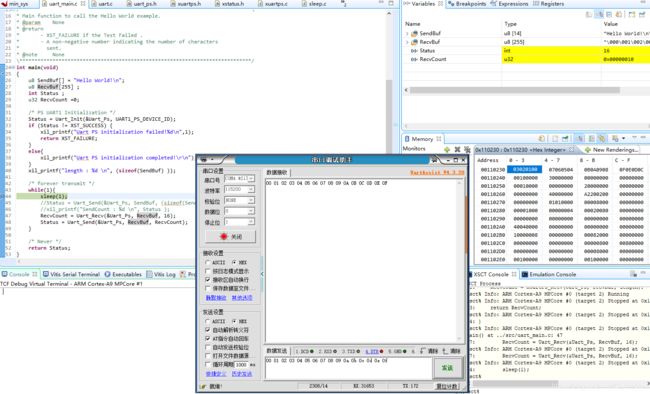 完成!
完成!
参考
UG585:Zynq-7000 SoC Technical Reference Manual