Paddle:VGG16 识别 MNIST
数据的处理
## 数据的生成器
# 加载相关库
import os
import random
import paddle
import paddle.fluid as fluid
from paddle.fluid.dygraph.nn import Conv2D, Pool2D, Linear
import numpy as np
from PIL import Image
import gzip
import json
# 定义数据集读取器
def load_data(mode='train'):
# 读取数据文件
datafile = './work/mnist.json.gz'
print('loading mnist dataset from {} ......'.format(datafile))
data = json.load(gzip.open(datafile))
# 读取数据集中的训练集,验证集和测试集
train_set, val_set, eval_set = data
# 数据集相关参数,图片高度IMG_ROWS, 图片宽度IMG_COLS
IMG_ROWS = 28
IMG_COLS = 28
# 根据输入mode参数决定使用训练集,验证集还是测试
if mode == 'train':
imgs = train_set[0]
labels = train_set[1]
elif mode == 'valid':
imgs = val_set[0]
labels = val_set[1]
elif mode == 'eval':
imgs = eval_set[0]
labels = eval_set[1]
# 获得所有图像的数量
imgs_length = len(imgs)
# 验证图像数量和标签数量是否一致
assert len(imgs) == len(labels), \
"length of train_imgs({}) should be the same as train_labels({})".format(
len(imgs), len(labels))
index_list = list(range(imgs_length))
# 定义数据生成器
def data_generator():
# 训练模式下,打乱训练数据
if mode == 'train':
random.shuffle(index_list)
imgs_list = []
labels_list = []
# 按照索引读取数据
for i in index_list:
# 读取图像和标签,转换其尺寸和类型
img = np.reshape(imgs[i], [1, IMG_ROWS, IMG_COLS]).astype('float32')
label = np.reshape(labels[i], [1]).astype('int64')
imgs_list.append(img)
labels_list.append(label)
# 如果当前数据缓存达到了batch size,就返回一个批次数据
if len(imgs_list) == BATCHSIZE:
yield np.array(imgs_list), np.array(labels_list)
# 清空数据缓存列表
imgs_list = []
labels_list = []
# 如果剩余数据的数目小于BATCHSIZE,
# 则剩余数据一起构成一个大小为len(imgs_list)的mini-batch
if len(imgs_list) > 0:
yield np.array(imgs_list), np.array(labels_list)
return data_generator
VGG模型的建立
由于 VGG16 太深,且MNIST图片太小,因此为了防止过拟合,这里,对原来的VGG16的卷积层进行了删剪:
# VGG模型代码
import numpy as np
import paddle
import paddle.fluid as fluid
from paddle.fluid.layer_helper import LayerHelper
from paddle.fluid.dygraph.nn import Conv2D, Pool2D, BatchNorm, Linear
from paddle.fluid.dygraph.base import to_variable
# 定义vgg块,包含多层卷积和1层2x2的最大池化层
class vgg_block(fluid.dygraph.Layer):
def __init__(self, num_convs, in_channels, out_channels):
"""
num_convs, 卷积层的数目
num_channels, 卷积层的输出通道数,在同一个Incepition块内,卷积层输出通道数是一样的
"""
super(vgg_block, self).__init__()
self.conv_list = []
for i in range(num_convs):
conv_layer = self.add_sublayer('conv_' + str(i), Conv2D(num_channels=in_channels,
num_filters=out_channels, filter_size=3, padding=1, act='relu'))
self.conv_list.append(conv_layer)
in_channels = out_channels
self.pool = Pool2D(pool_stride=2, pool_size = 2, pool_type='max')
def forward(self, x):
for item in self.conv_list:
x = item(x)
return self.pool(x)
class VGG(fluid.dygraph.Layer):
def __init__(self, conv_arch=((2, 64),
(2, 128), (3, 256))):
super(VGG, self).__init__()
self.vgg_blocks=[]
iter_id = 0
# 添加vgg_block
# 这里一共5个vgg_block,每个block里面的卷积层数目和输出通道数由conv_arch指定
in_channels = [1, 64, 128]
for (num_convs, num_channels) in conv_arch:
block = self.add_sublayer('block_' + str(iter_id),
vgg_block(num_convs, in_channels=in_channels[iter_id],
out_channels=num_channels))
self.vgg_blocks.append(block)
iter_id += 1
self.fc1 = Linear(input_dim=256*3*3, output_dim=100,
act='relu')
self.drop1_ratio = 0.5
self.fc3 = Linear(input_dim=100, output_dim=10, act='softmax')
def forward(self, x, label):
for item in self.vgg_blocks:
x = item(x)
x = fluid.layers.reshape(x, [x.shape[0], -1])
# print(x.shape)
x = fluid.layers.dropout(self.fc1(x), self.drop1_ratio)
# print(x.shape)
x = self.fc3(x)
if label is not None:
acc = fluid.layers.accuracy(input=x, label=label)
return x, acc
else:
return x
模型的训练
## 使用GPU进行模型的训练
#调用加载数据的函数
train_loader = load_data('train')
#在使用GPU机器时,可以将use_gpu变量设置成True
use_gpu = True
place = fluid.CUDAPlace(0) if use_gpu else fluid.CPUPlace()
BATCHSIZE = 100
EPOCH_NUM = 10
with fluid.dygraph.guard(place):
model = VGG()
model.train()
## 这里使用动态学习率,学习率根据训练步骤,从 0.01 衰减到 0.001 的过程
#计算变化的次数
total_steps = (int(60000//BATCHSIZE) + 1) * EPOCH_NUM
## 学习率以多项曲线从 0.01 衰减到 0.001
#lr = fluid.dygraph.PolynomialDecay(0.01, total_steps, 0.001)
#四种优化算法的设置方案,可以逐一尝试效果
# optimizer = fluid.optimizer.SGDOptimizer(learning_rate=0.01, parameter_list=model.parameters())
# optimizer = fluid.optimizer.MomentumOptimizer(learning_rate=0.01, momentum=0.9, parameter_list=model.parameters())
# optimizer = fluid.optimizer.AdagradOptimizer(learning_rate=0.01, parameter_list=model.parameters())
# optimizer = fluid.optimizer.AdamOptimizer(learning_rate=0.01, parameter_list=model.parameters())
# 可以在优化算法的基础上添加正则项,用于减少过拟合,参数regularization_coeff调节正则化项的权重
# optimizer = fluid.optimizer.SGDOptimizer(learning_rate=0.01, regularization=fluid.regularizer.L2Decay(regularization_coeff=0.1),parameter_list=model.parameters()))
optimizer = fluid.optimizer.AdamOptimizer(learning_rate=0.01, parameter_list=model.parameters())
iter=0
iters=[]
losses=[]
for epoch_id in range(EPOCH_NUM):
for batch_id, data in enumerate(train_loader()):
#准备数据
image_data, label_data = data
image = fluid.dygraph.to_variable(image_data)
label = fluid.dygraph.to_variable(label_data)
#前向计算的过程,同时拿到模型输出值和分类准确率
# 直接传入即可,无需修改one-hot编码
predict, acc = model(image, label)
avg_acc = fluid.layers.mean(acc)
#计算损失,取一个批次样本损失的平均值
loss = fluid.layers.cross_entropy(predict, label)
avg_loss = fluid.layers.mean(loss)
#每训练了200批次的数据,打印下当前Loss的情况
if batch_id % 200 == 0:
print("epoch: {}, batch: {}, loss is: {}, acc is {}".format(epoch_id, batch_id, avg_loss.numpy(), avg_acc.numpy()))
iters.append(iter)
losses.append(avg_loss.numpy())
iter = iter + 100
#后向传播,更新参数的过程
avg_loss.backward()
optimizer.minimize(avg_loss)
model.clear_gradients()
# 保存模型参数和优化器的参数
fluid.save_dygraph(model.state_dict(), './checkpoint/mnist_epoch{}'.format(epoch_id))
fluid.save_dygraph(optimizer.state_dict(), './checkpoint/mnist_epoch{}'.format(epoch_id))
结果:

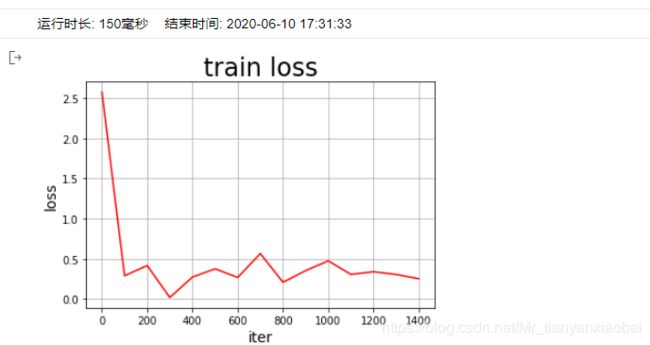
可视化
import matplotlib.pyplot as plt
%matplotlib inline
### 可视化
#画出训练过程中Loss的变化曲线
plt.figure()
plt.title("train loss", fontsize=24)
plt.xlabel("iter", fontsize=14)
plt.ylabel("loss", fontsize=14)
plt.plot(iters, losses,color='red',label='train loss')
plt.grid()
plt.show()
模型的测试
对模型进行测试
with fluid.dygraph.guard(place):
print('start evaluation .......')
#加载模型参数
model = VGG()
model_state_dict, _ = fluid.load_dygraph('checkpoint/mnist_epoch4')
model.load_dict(model_state_dict)
model.eval()
eval_loader = load_data('eval')
acc_set = []
avg_loss_set = []
for batch_id, data in enumerate(eval_loader()):
x_data, y_data = data
img = fluid.dygraph.to_variable(x_data)
label = fluid.dygraph.to_variable(y_data)
prediction, acc = model(img, label)
loss = fluid.layers.cross_entropy(input=prediction, label=label)
avg_loss = fluid.layers.mean(loss)
acc_set.append(float(acc.numpy()))
avg_loss_set.append(float(avg_loss.numpy()))
#计算多个batch的平均损失和准确率
acc_val_mean = np.array(acc_set).mean()
avg_loss_val_mean = np.array(avg_loss_set).mean()
print('loss={}, acc={}'.format(avg_loss_val_mean, acc_val_mean))
结果:
