51单片机学习笔记——AD转换
一、AD转换器的分类
直接A/D转换器
-
并行比较型
优点:转换速度快,内含寄存器,无需附加采样-保持电路。
缺点:需要很多电压比较器和触发器,高分辨率较难制造。 -
反馈比较型
分为计数型和逐次比较型,计数型又称为双积分型。
其中,计数型且转换速度不高,转换时间长,但价格便宜;逐次比较型使用对分搜索法,因此转换速度要比计数型快很多。(ADC0804和XPT2046都属于逐次比较型)
间接A/D转换器
- V-T(电压-时间)
- V-F(电压-频率)
二、A/D转换器主要参数指标
1.分辨率
分辨率为A/D转换器对输入信号的分辨能力,其计算公式如下,其中n为A/D转换器的位数:
分 辨 率 = 1 2 n 分辨率=\frac{1}{2^{n}} 分辨率=2n1
当A/D转换器支持输入负电压时,第一位代表正负,则分辨率的计算公式为:
分 辨 率 = 1 2 n − 1 分辨率=\frac{1}{2^{n-1}} 分辨率=2n−11
可以求得模拟电压的最小值如下, 满刻度为输入的模拟电压最大值:
变 化 最 小 值 = 满 刻 度 × 分 辨 率 变化最小值=满刻度\times 分辨率 变化最小值=满刻度×分辨率
2.转换误差
转换误差表示A/D转换器实际输出的数字量与理论输出量的区别。分为量化误差、偏移误差和满刻度误差。其中偏移误差和满刻度误差合称为非线性误差。
3.转换精度
转换精度为实际模拟量输入与理论模拟输入之差的最大值。对于A/D转换器而言,可以在每个阶梯的水平中点进行测量,它包括了所有误差。
4.转换时间
即完成一次A/D转换所需要的时间(包括稳定时间)。而转换时间的倒数为转换速率,即每秒转换的次数。
三、ADC0804
概况
ADC0804是逐次比较型A/D转换器,共有20个引脚,分辨率为8位,输入电压范围为0-5V,模数转换时间大约100us。价格便宜,应用广泛。
1.引脚详情

| 引脚 | 名称 | 解释 |
|---|---|---|
| 1 | C S ‾ \overline{CS} CS | 片选信号输入端,当输入低电平,表明A/D被选中 |
| 2 | R D ‾ \overline{RD} RD | 读信号输入端,低电平输出端有效 |
| 3 | W R ‾ \overline{WR} WR | 写信号输入端,低电平启用A/D转换 |
| 4 | CLK | 时钟信号输入端 |
| 5 | I N T R ‾ \overline{INTR} INTR | A/D转换结束信号,低电平表示转换完成 |
| 6-7 | VIN(+),VIN(-) | 两模拟信号输入端,可接收单极性,双极性和差模输入信号 |
| 8 | AGND | 模拟信号地 |
| 9 | VREF/2 | 参考电平输入端,决定量化单位 |
| 10 | DGND | 数字信号地 |
| 11-18 | DB7-DB0 | 具有三态特性的数字信号输出口 |
| 19 | CLKR | 内部时钟发生器外接电阻端 |
| 20 | VCC(VREF) | 芯片输入电源,为5V |
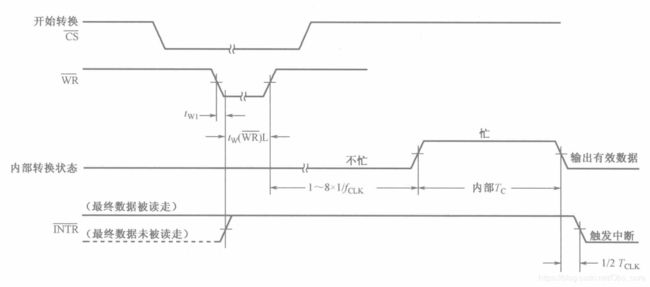
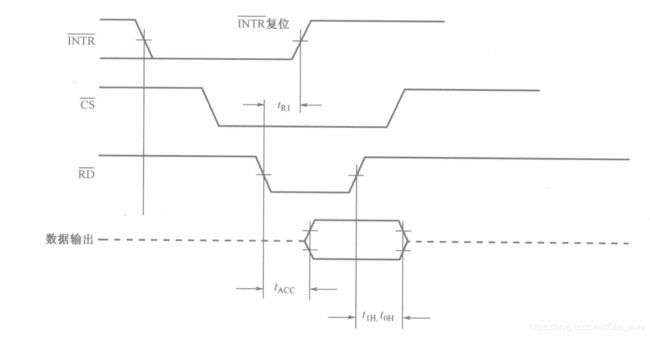
2.时序图
- 启动时序图
- 读取时序图
3.例程:电位器A/D转换
#include总结:代码是在郭天祥书中摘取后加入自己的想法进行的修改,做注释,增加可读性同时使每一步与时序图相对应。但由于博主手头没有相应的硬件,无法测试代码可行性。仅帮助理解ADC0804转换的过程。
四、XPT2046
概况
XPT2046本是电阻触控屏控制器,由于触摸控制器需要测量电压,因此可以作为A/D转换器使用。采用了逐次比较型A/D转换器,共有16个引脚,分辨率为12位,输入电压范围为0-6V。
1.引脚图与控制寄存器
- 引脚图为QFN-16封装方式
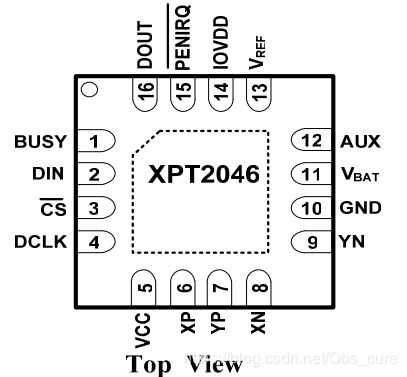
| 引脚 | 名称 | 解释 |
|---|---|---|
| 1 | BUSY | 忙时信号线,当 C S ‾ \overline{CS} CS为高电平时为高阻状态 |
| 2 | DIN | 串行数据输入端。当 C S ‾ \overline{CS} CS为低电平时,数据在DCLK上升沿锁存进来 |
| 3 | C S ‾ \overline{CS} CS | 片选信号。控制转换时序和使能串行输入输出寄存器,高电平时ADC掉电 |
| 4 | DCLK | 外部时钟信号输入端 |
| 5 | VCC | 电源输入端 |
| 6-9 | XP,YP,XN,YN | 信号输入端 |
| 10 | GND | 接地端 |
| 11 | VBAT | 电池监视输入端 |
| 12 | AUX | ADC辅助输入通道 |
| 13 | VREF | 参考电压输入/输出 |
| 14 | IOVDD | 数字电源输入端 |
| 15 | P E N I R Q ‾ \overline{PENIRQ} PENIRQ | 笔接触中断引脚 |
| 16 | DOUT | 串行数据输出端。数据在DCLK的下降沿移出,当 C S ‾ \overline{CS} CS高电平时为高阻状态 |
- 控制寄存器
| 位序号 | D7 | D6 | D5 | D4 | D3 | D2 | D1 | D0 |
|---|---|---|---|---|---|---|---|---|
| 位符号 | S | A2 | A1 | A0 | MODE | S E R D F R SER\sqrt{DFR} SERDFR | PD1 | PD0 |
| 位序号 | 名称 | 解释 |
|---|---|---|
| 7 | S | 开始位。S=1表示新的控制字节到来,S=0表示忽略PIN引脚数据 |
| 6-4 | A2-A0 | 通道选择位 |
| 3 | MODE | MODE=1为8位转换分辨率,MODE=0为12位转换分辨率 |
| 2 | S E R D F R SER\sqrt{DFR} SERDFR | S E R D F R SER\sqrt{DFR} SERDFR=1为单端输入方式, S E R D F R SER\sqrt{DFR} SERDFR=0为差分输入方式 |
| 1-0 | PD1-PD0 | 低功率模式选择位,一般采用低功率模式,赋值00 |
注:
由于博主使用的是普中单片机开发板,且XPT2046仅作为AD转换器使用,因此仅使用单端模式,控制A0,A1,A2三个位即可,其余位较为固定。
| 控制位 | A2 | A1 | A0 | 输入端口 | 外部设备 |
|---|---|---|---|---|---|
| 0x94/0xB4 | 0 | 0/1 | 1 | X+ | 电位器 |
| 0xD4 | 1 | 0 | 1 | Y+ | 热敏电阻 |
| 0xA4 | 0 | 1 | 0 | VBAT | 光敏电阻 |
| 0xE4 | 1 | 1 | 0 | AUX | 外部信号 |
2.时序图
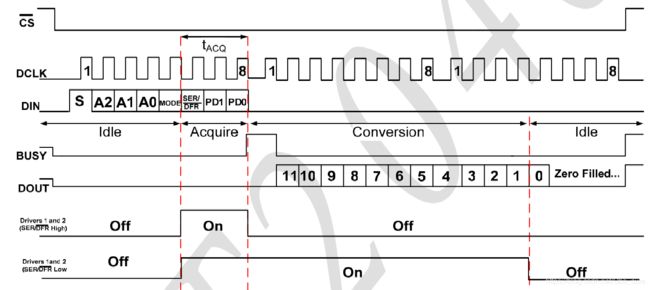
3.例程:电位器A/D转换
#include总结:代码是在普中科技A/D转换例程改写的。与ADC0804不同的是,由于XPT2046功能较多,使用了控制寄存器,且对比前面的郭天祥的板子,普中的板子没有使用锁存器,所以数据要一位一位的写入/读取。