【STM32H7教程】第24章 STM32H7的Cache解读(非常重要)
完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980
第24章 STM32H7的Cache解读(非常重要)
本章教程为大家讲解STM32H7初学过程中最重要的一个知识点Cache。Cache在STM32H7的高性能发挥中占着举足轻重的作用。所以掌握好Cache是提升STM32H7性能的关键一步。
目录
第24章 STM32H7的Cache解读(非常重要)
24.1 初学者重要提示
24.2 引出问题
24.3 支持的Cache配置
24.4 四种Cache(MPU)配置的读写操作流程
24.4.1 配置Non-cacheable
24.4.2 配置Write through,read allocate,no write allocate
24.4.3 配置Write back,read allocate,no write allocate
24.4.4 配置Write back,read allocate,write allocate
24.4.5 共享配置是个隐形的大坑
24.4.6 总结这几种方式的几个关键知识点
24.5 面对繁冗复杂的Cache配置,推荐方式和安全隐患解决办法
24.6 Cache的相关函数
24.6.1 函数SCB_EnableICache
24.6.2 函数SCB_DisableICache
24.6.3 函数SCB_InvalidateICache
24.6.4 函数SCB_EnableDCache
24.6.5 函数SCB_DisableDCache
24.6.6 函数SCB_InvalidateDCache
24.6.7 函数SCB_CleanDCache
24.6.8 函数SCB_CleanInvalidateDCache
24.6.9 函数SCB_InvalidateDCache_by_Addr
24.6.10 函数SCB_CleanDCache_by_Addr
24.6.11 函数SCB_CleanInvalidateDCache_by_Addr
24.7 总结
24.1 初学者重要提示
- 学习本章节前,务必保证已经学习了第23章的MPU知识。
- 本章是半年的实践经验总结,非常具有参考价值,而且是入门STM32H7的必学章节。
- Cache的熟练运用需要不断的经验积累。对于初学者来说,可能无法一下子理解所有知识点,但是一定要的花时间多读几遍,随着后面章节的不断运用,认识会不断的深入。
24.2 引出问题
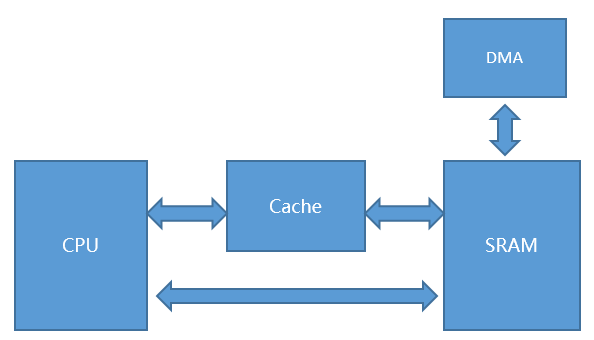
当前芯片厂商出的M7内核芯片基本都做了一级Cache支持,Cache又分数据缓存D-Cache和指令缓冲I-Cache,STM32H7的数据缓存和指令缓存大小都是16KB。对于指令缓冲,用户不用管,这里主要说的是数据缓存D-Cache。以STM32H7为例,主频是400MHz,除了TCM和Cache以400MHz工作,其它AXI SRAM,SRAM1,SRAM2等都是以200MHz工作。数据缓存D-Cache就是解决CPU加速访问SRAM。
如果每次CPU要读写SRAM区的数据,都能够在Cache里面进行,自然是最好的,实现了200MHz到400MHz的飞跃,实际是做不到的,因为数据Cache只有16KB大小,总有用完的时候。
对于使能了Cache的SRAM区,要分读写两种情况考虑。
- 读操作:
如果CPU要读取的SRAM区数据在Cache中已经加载好,这就叫读命中(Cache hit),如果Cache里面没有怎么办,这就是所谓的读Cache Miss。
- 写操作:
如果CPU要写的SRAM区数据在Cache中已经开辟了对应的区域(专业词汇叫Cache Line,以32字节为单位),这就叫写命中(Cache hit),如果Cache里面没有开辟对应的区域怎么办,这就是所谓的写Cache Miss。
24.3 支持的Cache配置
(这个知识点在上一章节进行了详细说明,这里再简述下核心内容)
Cache的配置是通过MPU来设置的,通常只用到下几种方式。
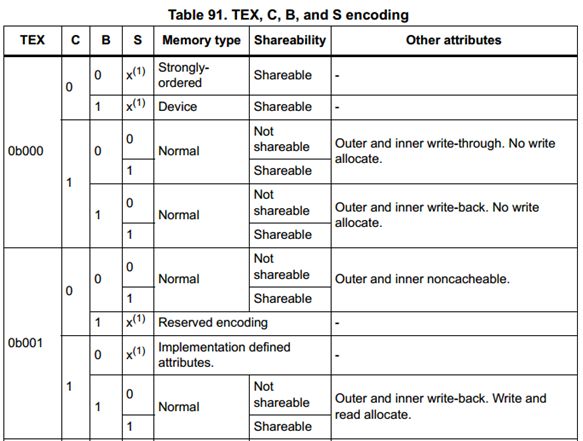
其中的TEX是用来设置Cache策略的,C是Cache,B是缓冲用来配合Cache设置的,而S是共享,用来解决多总线或者多核访问时的同步问题。MPU配置的时候,最主要的也是配置这几个参数。
Cache支持的策略有如下四种:

有了这四种方式,就可以正式进入本章的主题,Cache的读写操作是如何工作的,下面分这四种情况做介绍。
24.4 四种Cache(MPU)配置的读写操作流程
24.4.1 配置Non-cacheable
这个最好理解,就是正常的读写操作,无Cache。
对应四种MPU配置如下:
- TEX = 000 C=0 B=0 S=忽略此位,强制为共享
- TEX = 000 C=0 B=1 S=忽略此位,强制为共享
- TEX = 001 C=0 B=0 S=0
- TEX = 001 C=0 B=0 S=1
24.4.2 配置Write through,read allocate,no write allocate
注意,M7内核只要开启了Cache,read allocate就是开启的。
- 使能了此配置的SRAM缓冲区写操作
如果CPU要写的SRAM区数据在Cache中已经开辟了对应的区域,那么会同时写到Cache里面和SRAM里面;如果没有,就用到配置no write allocate了,意思就是CPU会直接往SRAM里面写数据,而不再需要在Cache里面开辟空间了。
在写Cache命中的情况下,这个方式的优点是Cache和SRAM的数据同步更新了,没有多总线访问造成的数据一致性问题。缺点也明显,Cache在写操作上无法有效发挥性能。
- 使能了此配置的SRAM缓冲区读操作
如果CPU要读取的SRAM区数据在Cache中已经加载好,就可以直接从Cache里面读取。如果没有,就用到配置read allocate了,意思就是在Cache里面开辟区域,将SRAM区数据加载进来,后续的操作,CPU可以直接从Cache里面读取,从而时间加速。
安全隐患,如果Cache命中的情况下,DMA写操作也更新了SRAM区的数据,CPU直接从Cache里面读取的数据就是错误的。
- 对应的两种MPU配置如下:
TEX = 000 C=1 B=0 S=1
TEX = 000 C=1 B=0 S=0
24.4.3 配置Write back,read allocate,no write allocate
注意,M7内核只要开启了Cache,read allocate就是开启的。
- 使能了此配置的SRAM缓冲区写操作
如果CPU要写的SRAM区数据在Cache中已经开辟了对应的区域,那么会写到Cache里面,而不会立即更新SRAM;如果没有,就用到配置no write allocate了,意思就是CPU会直接往SRAM里面写数据,而不再需要在Cache里面开辟空间了。
安全隐患,如果Cache命中的情况下,此时仅Cache更新了,而SRAM没有更新,那么DMA直接从SRAM里面读出来的就是错误的。
- 使能了此配置的SRAM缓冲区读操作
如果CPU要读取的SRAM区数据在Cache中已经加载好,就可以直接从Cache里面读取。如果没有,就用到配置read allocate了,意思就是在Cache里面开辟区域,将SRAM区数据加载进来,后续的操作,CPU可以直接从Cache里面读取,从而时间加速。
安全隐患,如果Cache命中的情况下,DMA写操作也更新了SRAM区的数据,CPU直接从Cache里面读取的数据就是错误的。
- 对应两种MPU配置如下:
TEX = 000 C=1 B=1 S=1
TEX = 000 C=1 B=1 S=0
24.4.4 配置Write back,read allocate,write allocate
注意,M7内核只要开启了Cache,read allocate就是开启的。
- 使能了此配置的SRAM缓冲区写操作
如果CPU要写的SRAM区数据在Cache中已经开辟了对应的区域,那么会写到Cache里面,而不会立即更新SRAM;如果没有,就用到配置write allocate了,意思就是CPU写到往SRAM里面的数据,会同步在Cache里面开辟一个空间将SRAM中写入的数据加载进来,如果此时立即读此SRAM区,那么就会有很大的速度优势。
安全隐患,如果Cache命中的情况下,此时仅Cache更新了,而SRAM没有更新,那么DMA直接从SRAM里面读出来的就是错误的。
- 使能了此配置的SRAM缓冲区读操作
如果CPU要读取的SRAM区数据在Cache中已经加载好,就可以直接从Cache里面读取。如果没有,就用到配置read allocate了,意思就是在Cache里面开辟区域,将SRAM区数据加载进来,后续的操作,CPU可以直接从Cache里面读取,从而时间加速。
安全隐患,如果Cache命中的情况下,DMA写操作也更新了SRAM区的数据,CPU直接从Cache里面读取的数据就是错误的。
这个配置被誉为可以最大程度发挥Cache性能,不过具体应用仍需具体分析。
- 对应两种MPU配置如下:
TEX = 001 C=1 B=1 S=1
TEX = 001 C=1 B=1 S=0
24.4.5 共享配置是个隐形的大坑
STM32H7编程手册对其的描述是多核共享。
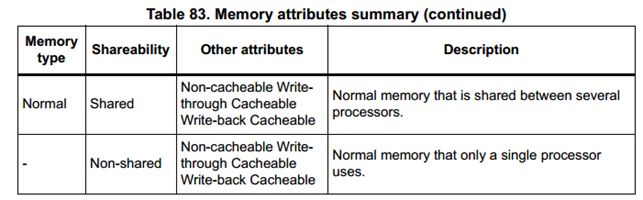
而H7的应用笔记对齐的描述是开启共享基本等同于关闭Cache。

实际测试下面四种开Cache的情况,开关共享对缓冲区的大批量数据的读操作影响很大,基本差出两倍,而写操作基本没有影响,也许这就是所谓的多总线同步读造成的。另外共享开关仅对开启了Cache的情况下有影响,而对于关闭了Cache的情况是没有影响的,开不开没关系。
24.4.6 总结这几种方式的几个关键知识点
- Cortex-M7内核的L1 Cache由多行内存区组成,每行有32字节,每行都配有一个地址标签。数据缓冲DCache是每4行为一组,称为4-way set associative。而指令缓冲区ICache是2行为一组,这样节省地址标签,不用每个行都标记一个地址。
- 对于读操作,只有在第1次访问指定地址时才会加载到Cache,而写操作的话,可以直接写到内存中(write-through模式)或者放到Cache里面,后面再写入(write-back模式)。
- 如果采用的是Write back,Cache line会被标为dirty,等到此行被evicted时,才会执行实际的写操作,将Cache Line里面的数据写入到相应的存储区。
- Cache命中是访问的地址落在了给定的Cache Line里面,所以硬件需要做少量的地址比较工作,以检查此地址是否被缓存。如果命中了,将用于缓存读操作或者写操作。如果没有命中,则分配和标记新行,填充新的读写操作。如果所有行都分配完毕了,Cache控制器将支持eviction操作。根据Cache Line替换算法,一行将被清除Clean,无效化Invalid或者重新配置。数据缓存和指令缓存是采用的伪随机替换算法。
- Cache支持的4种基本操作,使能,禁止,清空和无效化。Clean清空操作是将Cache Line中标记为dirty的数据写入到内存里面,而无效化Invalid是将Cache Line标记为无效,即删除操作。
24.5 面对繁冗复杂的Cache配置,推荐方式和安全隐患解决办法
- 推荐使用128KB的TCM作为主RAM区,其它的专门用于大缓冲和DMA操作等。
- Cache问题主要是CPU和DMA都操作这个缓冲区时容易出现,使用时要注意。
- Cache配置的选择,优先考虑的是WB,然后是WT和关闭Cache,其中WB和WT的使用中可以配合ARM提供的函数解决上面说到的隐患问题(见本章24.6小节)。但不是万能的,在不起作用的时候,直接暴力选择函数SCB_CleanInvlaidateDCache解决。关于这个问题,在分别配置以太网MAC的描述符缓冲区,发送缓冲区和接收缓冲区时尤其突出。
24.6 Cache的相关函数
CMSIS软件包的core_cm7.h文件为Cache的配置提供了11个函数:
- SCB_EnableICache
- SCB_DisableICache
- SCB_InvalidateICache
- SCB_EnableDCache
- SCB_DisableDCache
- SCB_InvalidateDCache
- SCB_CleanDCache
- SCB_CleanInvalidateDCache
- SCB_InvalidateDCache_by_Addr
- SCB_CleanDCache_by_Addr
- SCB_CleanInvalidateDCache_by_Addr
下面将这几个函数依次做个讲解。其中前三个函数是指令Cache,比较容易掌握。重点是后面几个数据Cache函数。由于函数SCB_CleanInvalidateDCache,SCB_CleanDCache和SCB_InvalidateDCache是对整个Cache的操作,所以比最后的三个函数SCB_InvalidateDCache_by_Addr,SCB_CleanDCache_by_Addr和SCB_CleanInvalidateDCache_by_Addr要耗时,当然,如果用户操作的存储器超过了数据Cache的大小,即16KB,那么就跟前三个函数没有区别了。
24.6.1 函数SCB_EnableICache
函数原型:
__STATIC_INLINE void SCB_EnableICache (void)
{
#if defined (__ICACHE_PRESENT) && (__ICACHE_PRESENT == 1U)
__DSB();
__ISB();
SCB->ICIALLU = 0UL; /* invalidate I-Cache */
__DSB();
__ISB();
SCB->CCR |= (uint32_t)SCB_CCR_IC_Msk; /* enable I-Cache */
__DSB();
__ISB();
#endif
}
函数描述:
此函数用于使能指令Cache,系统上电后优先初始化即可。
注意事项:
- __STATIC_INLINE:
表示内联函数,这种类型函数的作用就是将函数直接嵌入到调用此函数的代码中,从而降低调用此函数所占用的时间。
- __DMB指令:
Data Memory Barrier(数据存储器隔离),DMB 指令保证所有在它前面的存储器访问操作都执行完毕后,才提交在它后面的存储器访问操作。
- __DSB指令:
Data Synchronization Barrier(数据同步隔离),比DMB严格,当所有在它前面的存储器访问操作都执行完毕后,才执行在它后面的指令。
- __ISB指令:
Instruction Synchronization Barrier(指令同步隔离),它会清洗流水线,以保证所有它前面的指令都执行完毕之后,才执行它后面的指令。
24.6.2 函数SCB_DisableICache
函数原型:
__STATIC_INLINE void SCB_DisableICache (void)
{
#if defined (__ICACHE_PRESENT) && (__ICACHE_PRESENT == 1U)
__DSB();
__ISB();
SCB->CCR &= ~(uint32_t)SCB_CCR_IC_Msk; /* disable I-Cache */
SCB->ICIALLU = 0UL; /* invalidate I-Cache */
__DSB();
__ISB();
#endif
}
函数描述:
此函数用于禁止指令Cache。
注意事项:
__STATIC_INLINE,__DMB,__DSB和__ISB的作用看本章24.6.1小节的说明。
24.6.3 函数SCB_InvalidateICache
函数原型:
__STATIC_INLINE void SCB_InvalidateICache (void)
{
#if defined (__ICACHE_PRESENT) && (__ICACHE_PRESENT == 1U)
__DSB();
__ISB();
SCB->ICIALLU = 0UL;
__DSB();
__ISB();
#endif
}
函数描述:
此函数用于将指令Cache无效化,无效化的意思是将Cache Line标记为无效,等同于删除操作。这样Cache空间就都腾出来了,可以加载新的指令。
注意事项:
__STATIC_INLINE,__DMB,__DSB和__ISB的作用看本章24.6.1小节的说明。
24.6.4 函数SCB_EnableDCache
函数原型:
__STATIC_INLINE void SCB_EnableDCache (void)
{
#if defined (__DCACHE_PRESENT) && (__DCACHE_PRESENT == 1U)
uint32_t ccsidr;
uint32_t sets;
uint32_t ways;
SCB->CSSELR = 0U; /*(0U << 1U) | 0U;*/ /* Level 1 data cache */
__DSB();
ccsidr = SCB->CCSIDR;
/* invalidate D-Cache */
sets = (uint32_t)(CCSIDR_SETS(ccsidr));
do {
ways = (uint32_t)(CCSIDR_WAYS(ccsidr));
do {
SCB->DCISW = (((sets << SCB_DCISW_SET_Pos) & SCB_DCISW_SET_Msk) |
((ways << SCB_DCISW_WAY_Pos) & SCB_DCISW_WAY_Msk) );
#if defined ( __CC_ARM )
__schedule_barrier();
#endif
} while (ways-- != 0U);
} while(sets-- != 0U);
__DSB();
SCB->CCR |= (uint32_t)SCB_CCR_DC_Msk; /* enable D-Cache */
__DSB();
__ISB();
#endif
}
函数描述:
此函数用于使能数据Cache,系统上电后优先初始化即可。
注意事项:
__STATIC_INLINE,__DMB,__DSB和__ISB的作用看本章24.6.1小节的说明。
24.6.5 函数SCB_DisableDCache
函数原型:
__STATIC_INLINE void SCB_DisableDCache (void)
{
#if defined (__DCACHE_PRESENT) && (__DCACHE_PRESENT == 1U)
register uint32_t ccsidr;
register uint32_t sets;
register uint32_t ways;
SCB->CSSELR = 0U; /*(0U << 1U) | 0U;*/ /* Level 1 data cache */
__DSB();
SCB->CCR &= ~(uint32_t)SCB_CCR_DC_Msk; /* disable D-Cache */
__DSB();
ccsidr = SCB->CCSIDR;
/* clean & invalidate D-Cache */
sets = (uint32_t)(CCSIDR_SETS(ccsidr));
do {
ways = (uint32_t)(CCSIDR_WAYS(ccsidr));
do {
SCB->DCCISW = (((sets << SCB_DCCISW_SET_Pos) & SCB_DCCISW_SET_Msk) |
((ways << SCB_DCCISW_WAY_Pos) & SCB_DCCISW_WAY_Msk) );
#if defined ( __CC_ARM )
__schedule_barrier();
#endif
} while (ways-- != 0U);
} while(sets-- != 0U);
__DSB();
__ISB();
#endif
}
函数描述:
此函数用于禁止数据Cache。
注意事项:
__STATIC_INLINE,__DMB,__DSB和__ISB的作用看本章24.6.1小节的说明
24.6.6 函数SCB_InvalidateDCache
函数原型:
__STATIC_INLINE void SCB_CleanDCache (void)
{
#if defined (__DCACHE_PRESENT) && (__DCACHE_PRESENT == 1U)
uint32_t ccsidr;
uint32_t sets;
uint32_t ways;
SCB->CSSELR = 0U; /*(0U << 1U) | 0U;*/ /* Level 1 data cache */
__DSB();
ccsidr = SCB->CCSIDR;
/* clean D-Cache */
sets = (uint32_t)(CCSIDR_SETS(ccsidr));
do {
ways = (uint32_t)(CCSIDR_WAYS(ccsidr));
do {
SCB->DCCSW = (((sets << SCB_DCCSW_SET_Pos) & SCB_DCCSW_SET_Msk) |
((ways << SCB_DCCSW_WAY_Pos) & SCB_DCCSW_WAY_Msk) );
#if defined ( __CC_ARM )
__schedule_barrier();
#endif
} while (ways-- != 0U);
} while(sets-- != 0U);
__DSB();
__ISB();
#endif
}
函数描述:
此函数用于将数据Cache无效化,无效化的意思是将Cache Line标记为无效,等同于删除操作。这样Cache空间就都腾出来了,可以加载新的数据。
注意事项:
__STATIC_INLINE,__DMB,__DSB和__ISB的作用看本章24.6.1小节的说明。
24.6.7 函数SCB_CleanDCache
函数原型:
__STATIC_INLINE void SCB_CleanDCache (void)
{
#if defined (__DCACHE_PRESENT) && (__DCACHE_PRESENT == 1U)
uint32_t ccsidr;
uint32_t sets;
uint32_t ways;
SCB->CSSELR = 0U; /*(0U << 1U) | 0U;*/ /* Level 1 data cache */
__DSB();
ccsidr = SCB->CCSIDR;
/* clean D-Cache */
sets = (uint32_t)(CCSIDR_SETS(ccsidr));
do {
ways = (uint32_t)(CCSIDR_WAYS(ccsidr));
do {
SCB->DCCSW = (((sets << SCB_DCCSW_SET_Pos) & SCB_DCCSW_SET_Msk) |
((ways << SCB_DCCSW_WAY_Pos) & SCB_DCCSW_WAY_Msk) );
#if defined ( __CC_ARM )
__schedule_barrier();
#endif
} while (ways-- != 0U);
} while(sets-- != 0U);
__DSB();
__ISB();
#endif
}
函数描述:
此函数用于将数据Cache清除,清除的意思是将Cache Line中标记为dirty的数据写入到相应的存储区。
注意事项:
__STATIC_INLINE,__DMB,__DSB和__ISB的作用看本章24.6.1小节的说明。
24.6.8 函数SCB_CleanInvalidateDCache
函数原型:
__STATIC_INLINE void SCB_CleanInvalidateDCache (void)
{
#if defined (__DCACHE_PRESENT) && (__DCACHE_PRESENT == 1U)
uint32_t ccsidr;
uint32_t sets;
uint32_t ways;
SCB->CSSELR = 0U; /*(0U << 1U) | 0U;*/ /* Level 1 data cache */
__DSB();
ccsidr = SCB->CCSIDR;
/* clean & invalidate D-Cache */
sets = (uint32_t)(CCSIDR_SETS(ccsidr));
do {
ways = (uint32_t)(CCSIDR_WAYS(ccsidr));
do {
SCB->DCCISW = (((sets << SCB_DCCISW_SET_Pos) & SCB_DCCISW_SET_Msk) |
((ways << SCB_DCCISW_WAY_Pos) & SCB_DCCISW_WAY_Msk) );
#if defined ( __CC_ARM )
__schedule_barrier();
#endif
} while (ways-- != 0U);
} while(sets-- != 0U);
__DSB();
__ISB();
#endif
}
函数描述:
此函数是前面两个函数SCB_InvalidateDCache和SCB_CleanDCache的二合一。将Cache Line中标记为dirty的数据写入到相应的存储区后,再将Cache Line标记为无效,表示删除。这样Cache空间就都腾出来了,可以加载新的数据。
注意事项:
__STATIC_INLINE,__DMB,__DSB和__ISB的作用看本章24.6.1小节的说明。
24.6.9 函数SCB_InvalidateDCache_by_Addr
函数原型:
__STATIC_INLINE void SCB_InvalidateDCache_by_Addr (uint32_t *addr, int32_t dsize)
{
#if defined (__DCACHE_PRESENT) && (__DCACHE_PRESENT == 1U)
int32_t op_size = dsize;
uint32_t op_addr = (uint32_t)addr;
int32_t linesize = 32; /* in Cortex-M7 size of cache line is fixed to 8 words (32 bytes) */
__DSB();
while (op_size > 0) {
SCB->DCIMVAC = op_addr;
op_addr += (uint32_t)linesize;
op_size -= linesize;
}
__DSB();
__ISB();
#endif
}
函数描述:
此函数与本章24.6.6小节中讲解的函数作用一样,区别是这里可以指定地址和存储区大小。用于将数据Cache无效化,无效化的意思是将Cache Line标记为无效,等同于删除操作。这样Cache空间就都腾出来了,可以加载新的数据。
注意事项:
- __STATIC_INLINE,__DMB,__DSB和__ISB的作用看本章24.6.1小节的说明。
- 第1个参数addr : 操作的地址一定要是32字节对齐的,即这个地址对32求余数等于0。
- 第2个参数dsize :一定要是32字节的整数倍。
24.6.10 函数SCB_CleanDCache_by_Addr
函数原型:
__STATIC_INLINE void SCB_CleanDCache_by_Addr (uint32_t *addr, int32_t dsize)
{
#if defined (__DCACHE_PRESENT) && (__DCACHE_PRESENT == 1U)
int32_t op_size = dsize;
uint32_t op_addr = (uint32_t) addr;
int32_t linesize = 32; /* in Cortex-M7 size of cache line is fixed to 8 words (32 bytes) */
__DSB();
while (op_size > 0) {
SCB->DCCMVAC = op_addr;
op_addr += (uint32_t)linesize;
op_size -= linesize;
}
__DSB();
__ISB();
#endif
}
函数描述:
此函数与本章24.6.7小节中讲解的函数作用一样,区别是这里可以指定地址和存储区大小。用于将数据Cache清除,清除的意思是将Cache Line中标记为dirty的数据写入到相应的存储区。
注意事项:
- __STATIC_INLINE,__DMB,__DSB和__ISB的作用看本章24.6.1小节的说明。
- 第1个参数addr : 操作的地址一定要是32字节对齐的,即这个地址对32求余数等于0。
- 第2个参数dsize :一定要是32字节的整数倍。
24.6.11 函数SCB_CleanInvalidateDCache_by_Addr
函数原型:
__STATIC_INLINE void SCB_CleanInvalidateDCache_by_Addr (uint32_t *addr, int32_t dsize)
{
#if defined (__DCACHE_PRESENT) && (__DCACHE_PRESENT == 1U)
int32_t op_size = dsize;
uint32_t op_addr = (uint32_t) addr;
int32_t linesize = 32; /* in Cortex-M7 size of cache line is fixed to 8 words (32 bytes) */
__DSB();
while (op_size > 0) {
SCB->DCCIMVAC = op_addr;
op_addr += (uint32_t)linesize;
op_size -= linesize;
}
__DSB();
__ISB();
#endif
}
函数描述:
此函数与本章24.6.8小节中讲解的函数作用一样,区别是这里可以指定地址和存储区大小。将Cache Line中标记为dirty的数据写入到相应的存储区后,再将Cache Line标记为无效,表示删除。这样Cache空间就都腾出来了,可以加载新的数据。
注意事项:
- __STATIC_INLINE,__DMB,__DSB和__ISB的作用看本章24.6.1小节的说明。
- 第1个参数addr : 操作的地址一定要是32字节对齐的,即这个地址对32求余数等于0。
- 第2个参数dsize :一定要是32字节的整数倍。
24.7 总结
本章节就为大家讲解这么多,务必要反复多读几遍,能理解多少算多少,随着后续章节的学习再回过头来再学习。