cassandra 架构实现
cassandra 架构
所有系统最开始都是centralized。但是有很多缺点,比如单机的处理能力不够。
Centralized database如下图:
所以出现了分布式的数据库。如下图:

Partitioning的方式有range partitioning, list partitioning, hash partitioning。其中hash partitioning使用最多。如下图,数据根据key的hash结果,存入不同的数据库中。相比其他两种,它能够balance,保证每个数据库存的数据量相当。

如果要加一个server,如下图,要将key重新hash,实现新的balance,这需要O(n)级别的移动。这是这种方法的缺点。


如果hash function和server数不挂钩,就能解决问题。一个方法如下图,有2的n次方个key space,每个server负责一部分key space(key的value)。
有四台server,每个server占在一个数上,负责处理这个数之前的数。比如DB1负责15,0,1,2,3。这个结构是peer-to-peer,没有主从关系。
每个server都可以作为入口处理client的请求。Client找到任一个server,数据的key经过hash,得到12。DB1找它的表,找到第一个大于这个值(12)的数,此例中是14,对应DB4,于是数据被存入DB4。Client索要数据的过程和存储一致。这种方式的好处在于添加server和减少server时,数据迁移大大减小。

假如希望把新server DB5放在环中6处,这意味着以后4,5,6都归这个新server管理。4,5,6原来的数据存在DB2,这些数据需要存到DB5。只需要和一个点通信。M个server,N个key space,只需N/M级别时间。假设DB5需要移除,只需要把4,5,6还给DB2。任何节点加入,只需要向后节点要数据,任何节点离开,只需要将数据给后节点。

节点通信
在peer-to-peer结构中有一个很有名的协议,叫Gossip Protocol。它的精髓在于一传十,十传百。
每个node有个neighbor list,收到信息后转发给neighbor list里的node。node之前收到过消息则不再转发,降低网络overhead。
它两个重要参数,一个是Fan number,表示每个node转发的node数量,此例中是3,第二个是Time to live(TTL)。下图中,起始node的参数是3,它传给的node的参数变为2,依次递减,当node的参数是0时,不再转发。
比如之前例子中,DB5加入后,将加入信息传给其他server,DB5先将消息告诉DB1,DB3然后DB1将消息告诉DB4。如下图:

下图是Data Model,数据要有primary key:

将primary key进行hash之后,将属于key的这一行数据作为值存到server。Cassandra只基于行存储。

现在有load balance的问题,因为即使最开始数据分布比较均匀,在加入新的server之后,还是会使有的server处理的数据很少,有的server处理的数据很多。此外,数据量小时,很容易出现hash后某些key多,某些key少。另一个不balance的地方在于单机处理数据的不同。
解决方案有两个:virtual nodes和move nodes。
Virtual node
Virtual node指一台机器能充当几个点。比如有两台机器,DB1和DB2,它们分到相同数据量的几率很小,但是如果每个server可以扮演多个点,如下图,DB1扮演DB1a,DB1b,DB1c,DB1d。这两个server分到相同数据量的几率就大很多。

目前为止,每个节点负责一部分数据,所以需要数据replication。备份需要注意的是不要将所有的node存在相同的physical server上。数据备份带来consistency的问题。cassandra是一个AP系统,遵循CAP(C:数据是一致的,A:数据是可用的,P:数据被切分)原则。
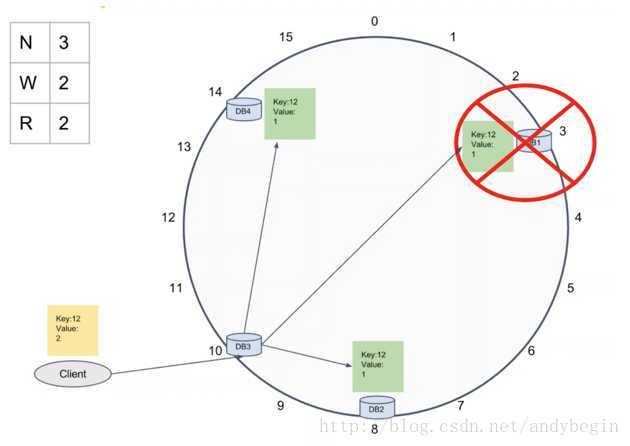
它有tunable consistency,有三个参数可调:N代表备份数,默认为3,W是写操作所需的成功数,R是读操作所需的成功数。下图是一个例子:

N为3,最简单的方法是用此DB后两个DB作为备份。DB4的数据在DB1和DB4备份。此时再写一个数。W为1,代表只要给一个DB写成功就任务整个新数据的写成功。R为1,代表只要从一个DB读到需要数据就算读取成功,但这样的问题在于读取的数据不一定是最新的。

下面的例子是W为3。三个DB都写成功才算是数据的写成功。

如果W为1,R为3,也能保证读到最新的数据。

Strong Consistency保证一定读到新数据:W + R > N。
如果W少R多时,判断哪个数据是新数据时,可以通过比较timestamp,数据的存储有timestamp信息。
最终一致性
有三种方案:read repair,hinted handoff,anti-entropy repair
1)read repair
可以设置一个概率来触发read repair,当它被触发时,向所有replica发请求,从一个replica读数据,从其他replica读摘要,如果摘要和数据不一致,强迫所有replica进行比较,同步数据。
2)hinted handoff
即使W为2,也会尝试给所有机器写。当DB1 fail,如果有两个其他机器写成功,仍会反应写成功。DB3本不需要存这个数据,但现在存储这个数据,并且在下面写一个hint:DB1,表示数据本该存在DB1里。在短时间内,DB3会不断尝试把数据写回DB1。
3)anti-entropy repair
每个node定期和其他replica进行数据比较,如果发现数据不同,进行merge。定期的时间默认为一秒钟。如果node fail,重新启动会尝试和replica同步。如果数据很久没有被读取,当它被读取时,进行同步数据更新。
检查数据不一致性
Cassandra使用merkle trees的方式探测inconsistency。如下图:
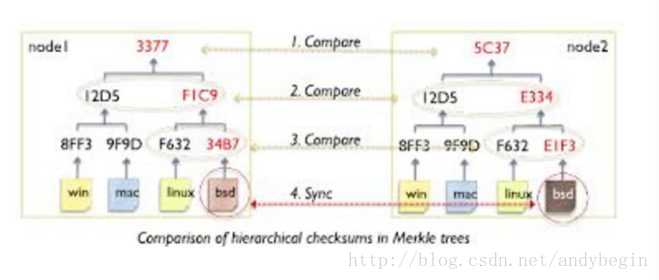
它将每块数据进行hash。把每两个hash后结果进行hash,依次类推,形成一个二叉树。当发现不同时,类似二叉树查找进行比较。它的缺点是如果写操作很多时,merkle tree的构建非常复杂。
提高读写效率
1) increase write speed
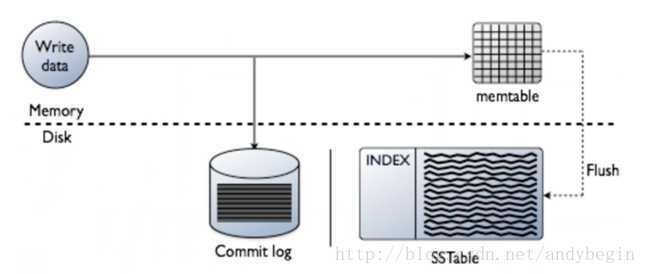
写的时候,首先尝试往内存里写,同时写一个log。当内存里的table写满后,存入disk。
2) increase read speed

使用compaction。一定情况下,将几个数据块进行merge。把同一个key的数据块放在一起。同时可以设置TTL,这个TTL以时间为单位,时间一到,数据删除,减少merge。
Compaction提供三个方案:
1)SizeTieredCompactionStrategy (STCS):每四个数据块压一块,对于insert多的系统好。
2)LeveledCompactionStrategy (LCS):对于update多的系统好
3)DataTieredCompactionStrategy (DTCS):根据时间进行compaction