stm32 CubeMX v5.6.1使用SD+FATFS+freeRTOS R0.12c
看网上有很多关于新板CubeMX在SD卡上使用FAFTFS系统遇到各种问题,比如有人说新版代码没有调用初始化函数,有的说Platform Setting不配置引脚会导致读写不成功,还有的说4线SDIO的频率要配置成12M,反正就是说新版CubeMX坑。其实只是新版代码较多的使用了结构体和函数指针,把C语言里显而易见的函数调用隐藏起来了,新版代码还是很好用的。下面就演示一下如何配置SDIO(SDMMC同样操作)、FATFS、freeRTOS。
1、开启外部晶振:

2、配置时基:

3、开启SDIO或(SDMMC)后,所有参数都不需要修改,只需要打开发送、接收的DMA和SD卡全局中断:
SD卡全局中断:

4、开启FATFS,把MAX_SS改为4096,以便FATFS系统支持更多参数不同的SD卡,一般设置为512也没什么问题:
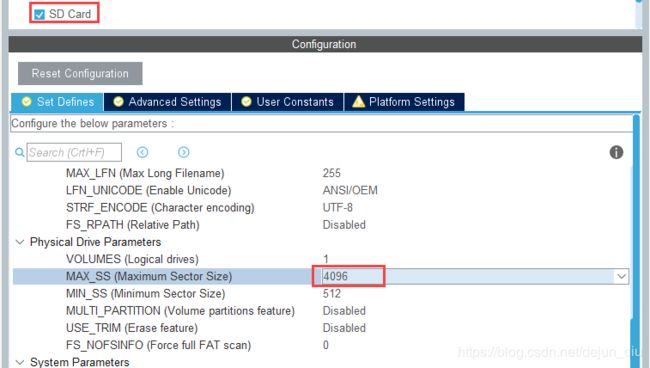
需要在Advanced Settings标签栏里确认一下Use dma template是启用的:

Platform标签栏可以不用管,没错,确实不用管。
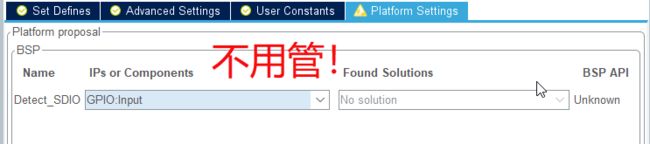
这根引脚是用来检测SD卡是否已经插入的,具体的检测方法需要用户自己实现,这是来自ST官方的解释:

咱们看看这个函数体是什么样的:
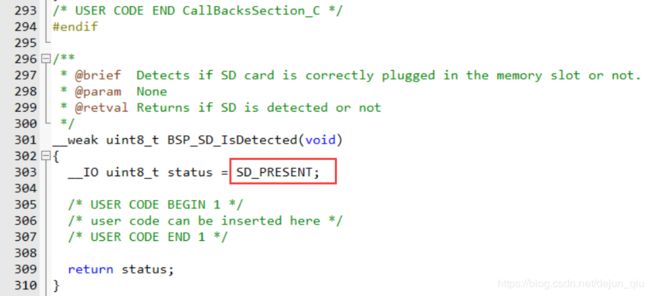
这个函数默认返回的就是SD卡已经插好,所以真不用管它了。
5、开启freeRTOS,把堆栈扩大点儿就行了,其它完全默认:

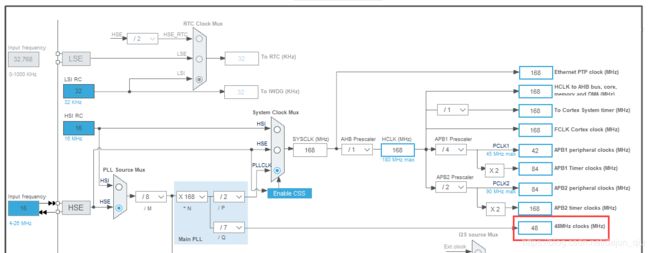
6、配置时钟树,保证红框内为48M就行:
7、开启串口1。
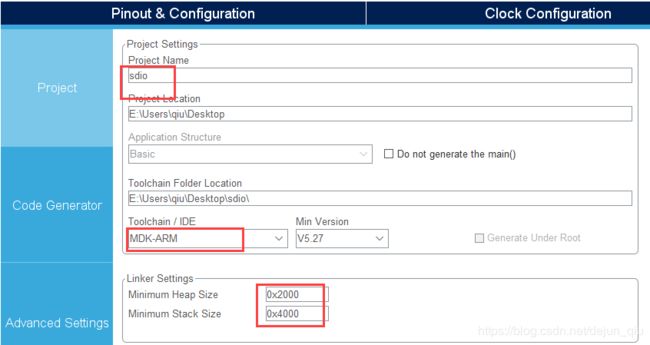
7、配置工程名、链接堆栈大小、生成代码:
8、在main.c中添加重映射printf代码和fatfs测试测试用的代码,其它的文件完全不用改。测试代码在StartDefaultTask里,main.c内容如下:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* © Copyright (c) 2020 STMicroelectronics.
* All rights reserved.
*
* This software component is licensed by ST under Ultimate Liberty license
* SLA0044, the "License"; You may not use this file except in compliance with
* the License. You may obtain a copy of the License at:
* www.st.com/SLA0044
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "cmsis_os.h"
#include "fatfs.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
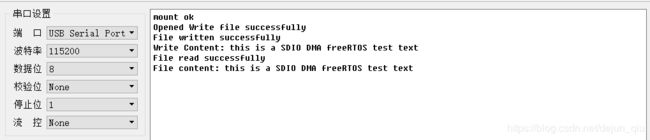
#include 9、实验结果:
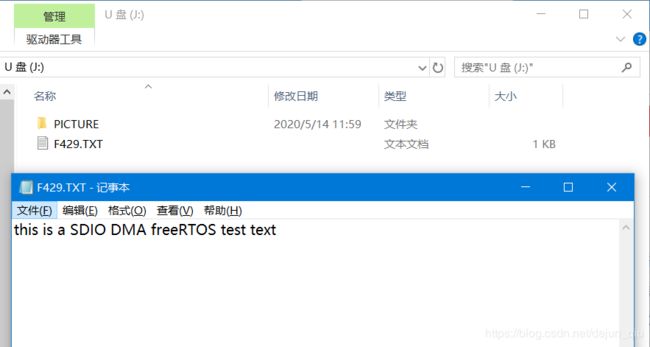
SD卡内容:
/--------------下面是我的小店铺,欢迎有需要的同学来看看--------------/
淘宝小店:芯视界touchgfx