zynq linux驱动之PL-PS中断
PC:Windows 10
虚拟机:ubuntu 16.04
vivado:2017.04
PetaLinux:2017.04
开发板:黑金AX7010
根文件系统:debian8
-------------------------------------------------- --------------------传说中的分割线------------------------- -------------------------------------------------- ----
将 zynq linux驱动之传统开发 里的vivado工程另存为interrupt7010
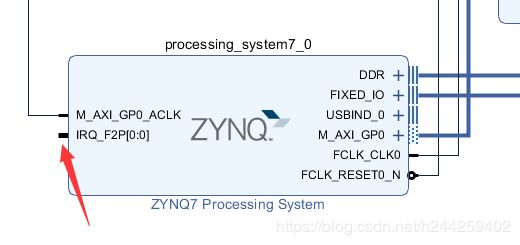
接下来配置一下中断

这里会出现中断的接口
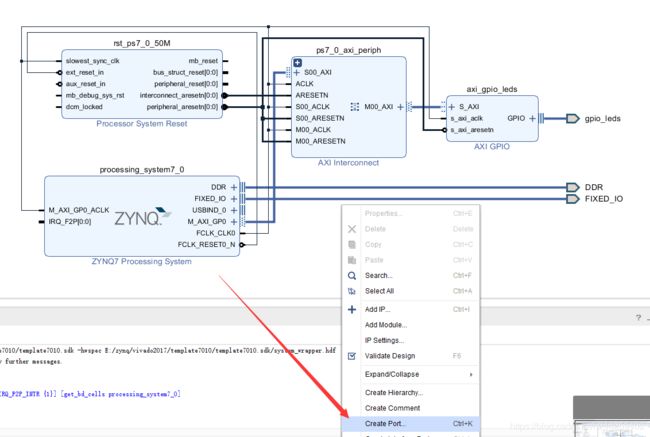
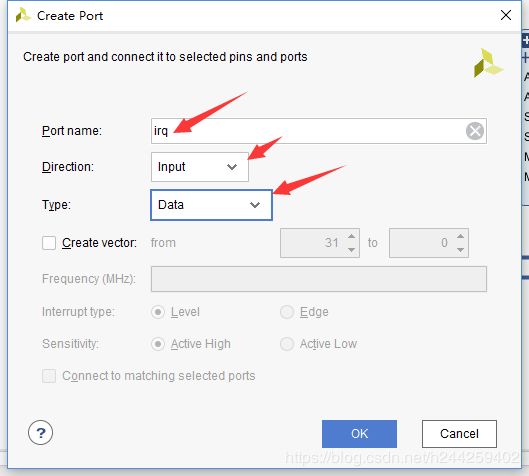
接下来添加一个引脚
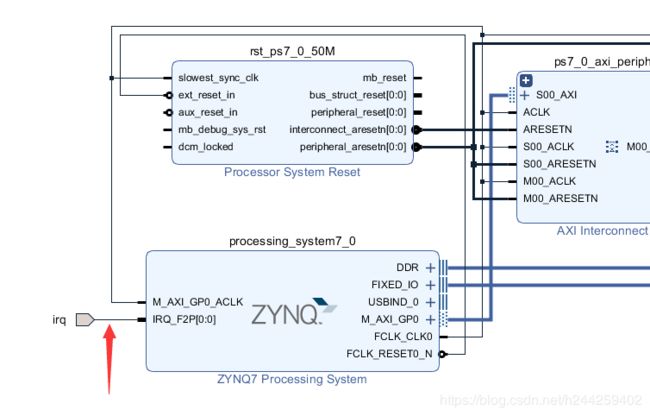
连起来
重新生成一下顶层文件
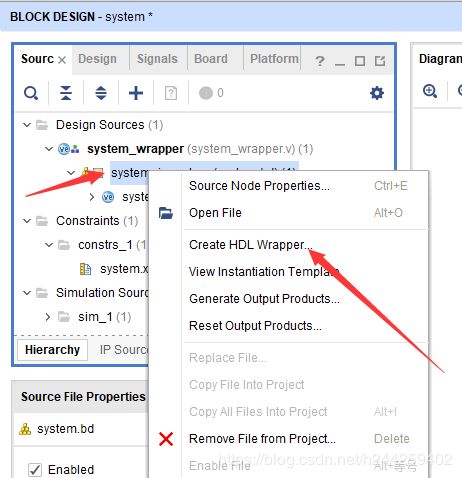
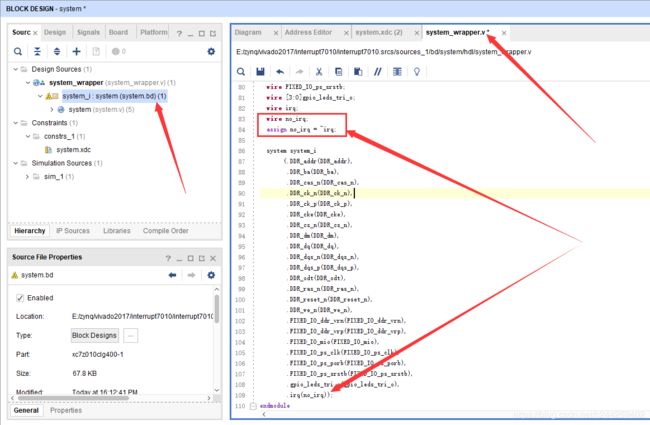
打开顶层文件,加一个非门(因为PS这边貌似只支持上升沿中断和高电平中断)
在约束文件里面添加触发IRQ的引脚(这里用的是KEY4,HDMI座子旁边的那个按键)

执行生成位文件

结束之后将原来的SDK目录删掉
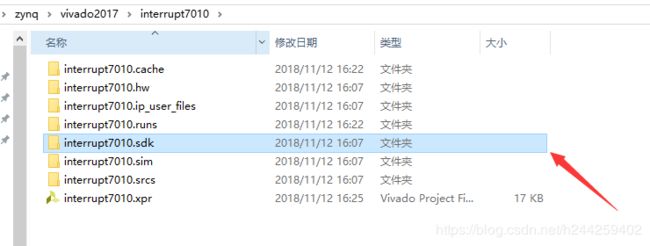
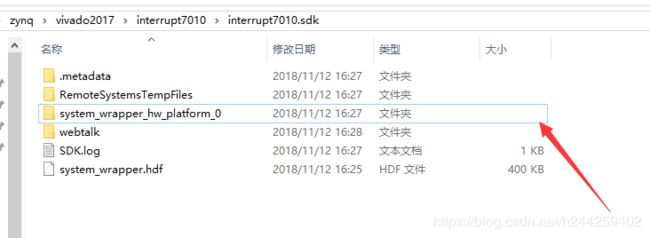
重新导入硬件和位文件之后打开SDK
将该文件夹拷贝到Ubuntu的里
使用的PetaLinux编译fsbl,u-boot的,内核,设备树文件:
过程略.....
用的PetaLinux制作BOOT.BIN文件,将BOOT.BIN,image.ub,system.dtb文件拷贝到SD卡的fat分区里(这里没有用的PetaLinux生成的根文件系统,用的是debian8)
接下来打开datasheet
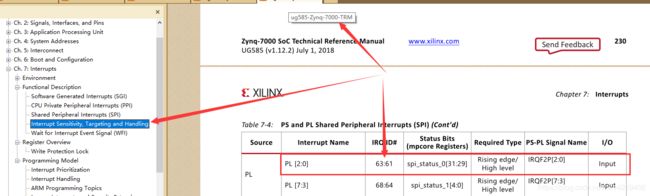
找到中断号是61
然后先到开板上看一下
cat /proc/interrupts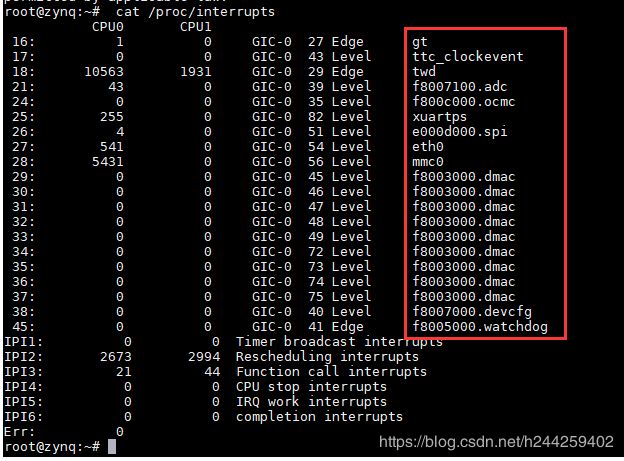
再看看datasheet上
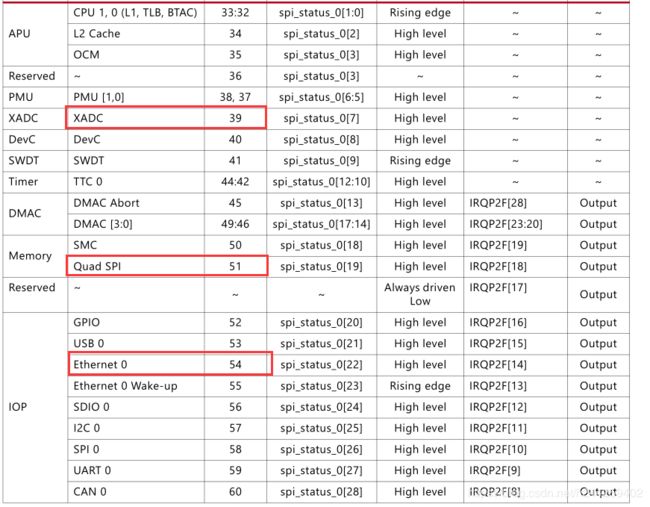
没有问题,中断号都对得上
然后再回到ubuntu里看看设备树
vim components/plnx_workspace/device-tree/device-tree-generation/zynq-7000.dtsi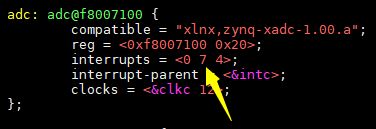
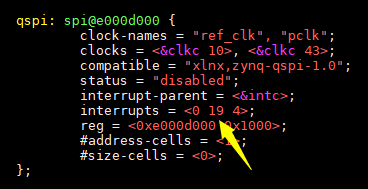
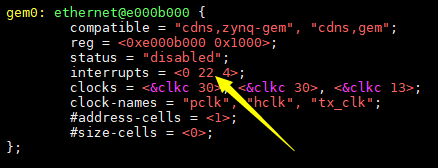
发现这里的中断号跟datasheet 和 /proc/interrupt 里面的对不上
仔细观察发现设备树里面的中断号是datasheet的中断号减去32得到的值
接下来仿照这个写一个自己的
vim project-spec/meta-user/recipes-bsp/device-tree/files/system-user.dtsi/include/ "system-conf.dtsi"
/ {
amba_pl: amba_pl{
#address-cells = <1>;
#size-cells = <1>;
compatible = "simple-bus";
ranges;
irq: irq@0{
compatible = "hello,irq";
interrupt-parent = <&intc>;
interrupts = <0 29 2>;
};
};
};
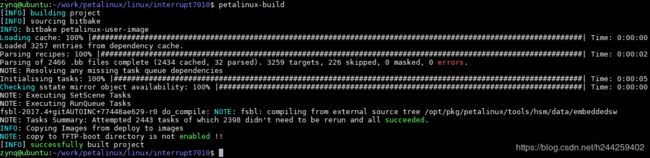
执行的petaLinux-build编译
编译完成之后
到开发板上,挂接NFS文件系统,然后把编译好的设备树文件(system.dts)拷贝到开发板SD卡的fat分区里,重启开发板
ls /proc/device-tree/amba_pl/可以看到设备树节点增加了IRQ @ 0
![]()
编写驱动:
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include /* error codes */
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
//
static char devname[16];
static int major;
static int mijor;
static struct class* cls;
static void __iomem* base_address;
static resource_size_t remap_size;
static int irq;
static struct device* dev;
//
#define DEVICE_NAME "irq_drv"
static volatile int irq_is_open = 0;
static struct fasync_struct *irq_async;
static int irq_drv_open(struct inode *Inode, struct file *File)
{
irq_is_open = 1;
return 0;
}
int irq_drv_release (struct inode *inode, struct file *file)
{
irq_is_open = 0;
return 0;
}
static ssize_t irq_drv_read(struct file *file, char __user *buf, size_t count, loff_t *ppos)
{
return 0;
}
static ssize_t irq_drv_write(struct file *file, const char __user *buf, size_t count, loff_t *ppos)
{
return 0;
}
static int irq_drv_fasync (int fd, struct file *filp, int on)
{
return fasync_helper (fd, filp, on, &irq_async);
}
static struct file_operations irq_fops = {
.owner = THIS_MODULE,
.open = irq_drv_open,
.read = irq_drv_read,
.write = irq_drv_write,
.fasync = irq_drv_fasync,
.release = irq_drv_release,
};
static irqreturn_t irq_interrupt(int irq, void *dev_id)
{
printk("irq = %d\n", irq);
if(irq_is_open)
{
kill_fasync (&irq_async, SIGIO, POLL_IN);
}
return IRQ_HANDLED;
}
static int irq_probe(struct platform_device *pdev)
{
int err;
struct device *tmp_dev;
memset(devname,0,16);
strcpy(devname, DEVICE_NAME);
major = register_chrdev(0, devname, &irq_fops);
cls = class_create(THIS_MODULE, devname);
mijor = 1;
tmp_dev = device_create(cls, &pdev->dev, MKDEV(major, mijor), NULL, devname);
if (IS_ERR(tmp_dev)) {
class_destroy(cls);
unregister_chrdev(major, devname);
return 0;
}
irq = platform_get_irq(pdev,0);
if (irq <= 0)
return -ENXIO;
dev = &pdev->dev;
err = request_threaded_irq(irq, NULL,
irq_interrupt,
IRQF_TRIGGER_RISING | IRQF_ONESHOT,
devname, NULL);
if (err) {
printk(KERN_ALERT "irq_probe irq error=%d\n", err);
goto fail;
}
else
{
printk("irq = %d\n", irq);
printk("devname = %s\n", devname);
}
//保存dev
//platform_set_drvdata(pdev, &xxx);
return 0;
fail:
free_irq(irq, NULL);
device_destroy(cls, MKDEV(major, mijor));
class_destroy(cls);
unregister_chrdev(major, devname);
return -ENOMEM;
}
static int irq_remove(struct platform_device *pdev)
{
device_destroy(cls, MKDEV(major, mijor));
class_destroy(cls);
unregister_chrdev(major, devname);
free_irq(irq, NULL);
printk("irq = %d\n", irq);
return 0;
}
static int irq_suspend(struct device *dev)
{
return 0;
}
static int irq_resume(struct device *dev)
{
return 0;
}
static const struct dev_pm_ops irq_pm_ops = {
.suspend = irq_suspend,
.resume = irq_resume,
};
//MODULE_DEVICE_TABLE(platform, irq_driver_ids);
static const struct of_device_id irq_of_match[] = {
{.compatible = "hello,irq" },
{ }
};
MODULE_DEVICE_TABLE(of, irq_of_match);
static struct platform_driver irq_driver = {
.probe = irq_probe,
.remove = irq_remove,
.driver = {
.owner = THIS_MODULE,
.name = "irq@0",
.pm = &irq_pm_ops,
.of_match_table = irq_of_match,
},
};
module_platform_driver(irq_driver);
MODULE_LICENSE("GPL v2");
Makefile文件:
export ARCH=arm
KERN_DIR = /home/zynq/work/kernel/linux-4.9
all:
make -C $(KERN_DIR) M=`pwd` modules
clean:
make -C $(KERN_DIR) M=`pwd` modules clean
rm -rf modules.order
obj-m += irq_drv.o
编译驱动

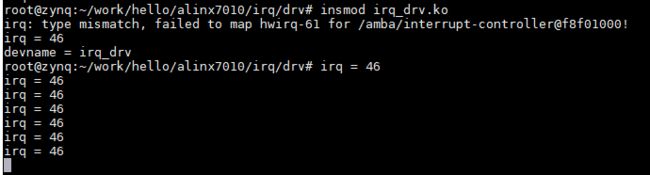
开发板挂接NFS文件系统,加载驱动
然后按一下按键,内核就能打印出IRQ
编写测试程序:
#include
#include
#include
#include
#include
#include
#include
#include
#include
int fd;
void my_signal_fun(int signum)
{
printf("irq app printf!\n");
}
int main(int argc, char **argv)
{
unsigned char key_val;
int ret;
int Oflags;
signal(SIGIO, my_signal_fun);
fd = open("/dev/irq_drv", O_RDWR);
if (fd < 0)
{
printf("can't open!\n");
}
fcntl(fd, F_SETOWN, getpid());
Oflags = fcntl(fd, F_GETFL);
fcntl(fd, F_SETFL, Oflags | FASYNC);
while (1)
{
sleep(1000);
}
return 0;
}
编译
arm-linux-gnueabihf-gcc -o irq irq.c回到开发板运行测试程序
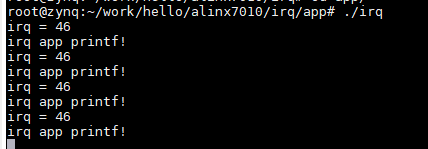
按下按键之后能够看到内核和测试程序的打印信息
上一篇:zynq linux驱动之使用设备树开发