【嵌入式开发】LED 驱动 ( LED发光二极管原理 | 底板原理图分析 | 核心板原理图分析 | GPIO | 裸板程序烧写流程 )
文章目录
开发板 的 LED 灯 作用 : 嵌入式软件的开发初期, 如 开发 BootLoader 代码 或者 Kernel 内核代码 过程中, 有效的调试方法有限, 此时通常使用 开发板上的 LED 灯 作为 程序调试的手段 ; 另外除 LED 灯 之外 并不是没有调试手段, JLink 调试器可以进行本阶段的调试 ;
之后的博客中开始接触 外围 硬件的操作, 外围硬件包括 串口, Flash, SD卡, 网卡 等; LED 是最简单的一种 外围硬件;
外围硬件驱动程序设计流程 : ① 分析原理图 ② 阅读分析 芯片手册, ③ 驱动设计, ④ 代码编写 ;
本博客的参考文章及相关资料下载 :
- 1.本博客代码及参考手册下载 : https://download.csdn.net/download/han1202012/10573310
#一. LED 简介
##1. LED 原理图
###(1) LED 底板 原理图
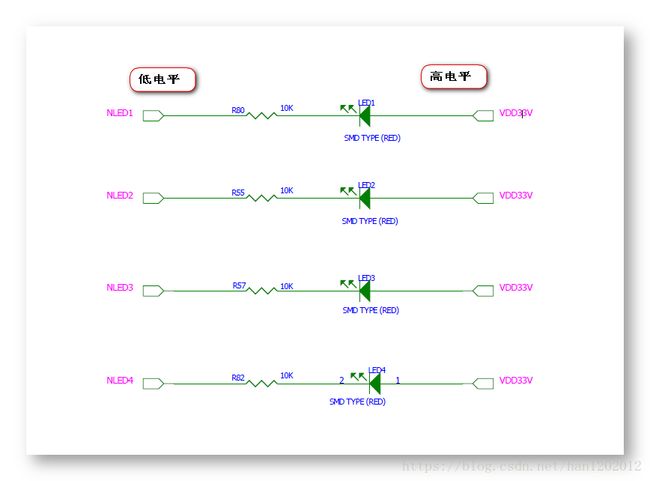
LED 底板原理图分析 :
- 1.LED 发光原理 : LED 是发光二极管, 二极管两端的电压差到达一个阈值, 就会处于导通状态, 此时就是发光状态;
- 2.OK6410 LED 底板图分析 : 以 第一个 LED1 为例, 右侧时高电平, 左侧是低电平, 当电压差到达一定程度 LED 就会处于导通状态, 低电平端引脚是 NLED1 ;
###(2) LED 核心板 原理图
LED 核心板原理图 :
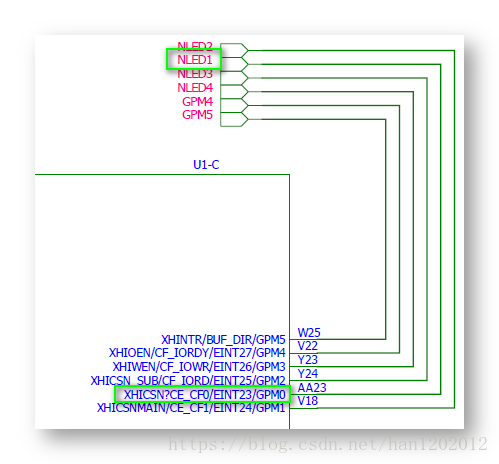
- 1.OK6410 核心板原理图分析 : 下图是 核心板 原理图的部分截图, 可以看到
NLED1接在 CPU GPIO 的GPM0引脚上, 因此可以通过操作 GPIO 的 GPM0 引脚 来进行设置 NLED1 引脚的低电平操作;
##2. GPIO
###( 1 ) GPIO 简介
GPIO 简介 : 英文全称 General-Purpose Input / Output Ports, 中文翻译为 : 通用输入输出端口;
- 1.GPIO 作用 : 很多结构简单的外部设备 或者 电路 只要求两种状态 : 开 或 关, GPIO 端口 只用于传输 开关 信号, CPU 通过 GPIO 端口来操作这些简单的设备;
- 2.串口 和 USB 作用 : 用于传输复杂数据, 因此简单的 开关 使用 GPIO 比较 合适;
- 3.LED 灯场景 : 此处通过操作 GPIO 的 GPM0 引脚, 来给 LED 灯一段加低电平, 只需要 加 或者 不加 两种操作;
- 4.GPIO 使用 : 每个 GPIO 端口都至少需要两个寄存器来使用, ① 控制寄存器 选择端口的 输入/输出 操作, ② 数据寄存器 用于存放数据;
###( 2 ) GPIO 文档
参考手册 : ARM芯片 手册 S3C6410X.pdf ( 基于 6410 开发板 ARM 11 )
- 1.手册对应章节 : 10 章节 10-GPIO;
- 2.S3C6410X.pdf手册下载地址 :https://download.csdn.net/download/han1202012/10573310
GPIO 文档 :
- 1.GPIO 引脚说明 : S3C6410 有 187 个输入输出引脚, 分属于 17 个端口; 其中的 LED1 就是属于 GPM0;
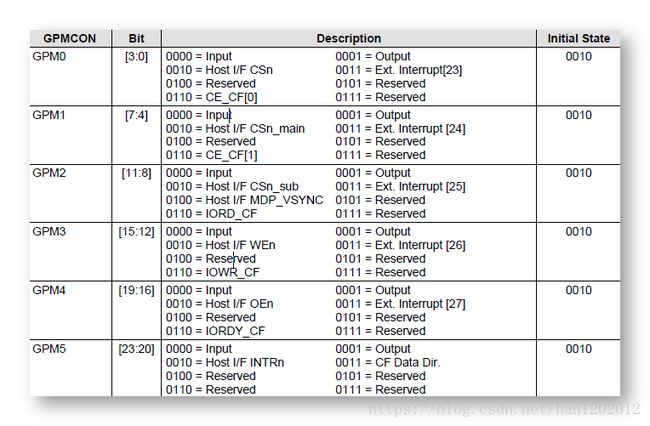
- 2.GPM 控制寄存器 : GPM 控制寄存器分为 4 位, 其中 LED1 连接的引脚为 GPM0, GPM0 引脚 对应的控制寄存器的 [3 : 0] 位, 设置 0b0000 即 设置为输入数据, 设置 0b0001 即设置为输出数据;
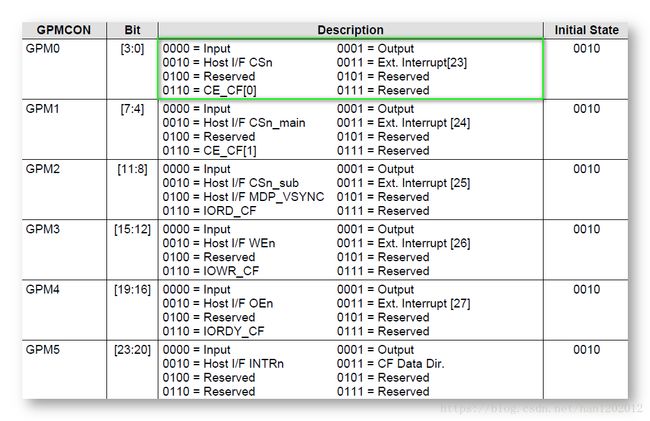
- 3.GPM 数据寄存器 : GPM 数据寄存器 有 6 位 [5 : 0], 设置 第 0 位 数据, 当端口被设置为 输入/输出 功能, 其设置的 0 或 1 数据就是引脚的状态 ;

###( 3 ) 点亮 LED 灯
点亮 LED 灯 :
-
1.地板原理图分析 : 四个 LED 灯的低电平, 分别由 NLED1, NLED2, NLED3, NLED4 四个引脚控制;
-
2.核心板原理图 : NLED1, NLED2, NLED3, NLED4 四个引脚分别接在了 GPIO 端口的 GPM0, GPM1, GPM2, GPM3 四个引脚上;
-
3.设置 GPIO 控制寄存器 : 设置 GPM0, GPM1, GPM2, GPM3 对应的 控制寄存器 ;
-
4.设置 GPIO 数据寄存器 : 设置 GPM0, GPM1, GPM2, GPM3 对应的 数据寄存器 ; 其中 设置 0 为 低电平, 设置 1 为 高电平, 使 LED 灯亮起来, 该引脚需要设置 低电平 达到 发光二极管的电压差阈值, LED 才能亮起来;
##3. 外设基地址初始化
###( 1 ) C15 寄存器 简介
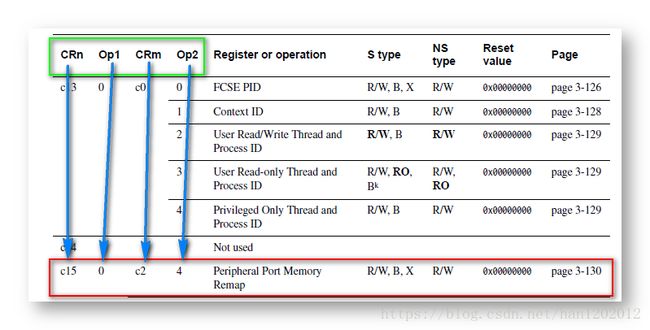
C15 寄存器 : 英文全称 Peripheral Port Memory Remap Register, 外设端口内存映射寄存器 ;
- 1.外设端口内存映射寄存器 作用 : 为 非共享 的设备 重新进行内存映射, 覆盖页表中的内存映射关系, 可以通过一个地址强制访问外设端口;
- 2.无使用前提 : 不管 MMU 是否启用, 都不影响 外设端口地址内存 的重新映射;
- 3.权限说明 : 外设端口内存映射寄存器 拥有最高级别的权限, 高于 Primery 和 Normal 级别的内存映射寄存器;
###( 2 )外设端口内存映射寄存器 属性
外设端口内存映射寄存器 属性 :
- 1.寄存器编号 : 该寄存器是 CP15 协处理器中的 C15 寄存器;
- 2.寄存器属性 : 该寄存器是一个 32 位 的可读写寄存器;
- 3.访问权限 : 只有在特权模式下才可以访问 ;
#二. LED 控制代码编写
##1. 汇编代码编写
###(1) 控制 LED 开关
LED 控制 汇编代码编写 : 基于 OK6410 开发板; 1 ~ 3 步骤为 数据准备, 4 ~ 6 步骤为 设置 GPIO 的 GPM 控制寄存器值, 将引脚设置为输出功能, 7 ~ 9 步骤 为 设置 GPIO 的 GPM 数据寄存器值 ;
- 1.定义 GPM 控制寄存器地址常量 : GPM 控制寄存器的地址是 0x7F008820,
#define GPBCON 0x7F008820, 下图是 S3C6410X.pdf 文档中 10-GPIO Page 338 介绍;
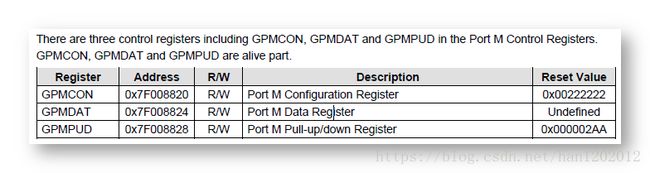
- 2.定义 GPM 数据寄存器地址常量 : GPM 控制寄存器的地址是 0x7F008824,
#define GPBDAT 0x7F008824, 上图是 S3C6410X.pdf 文档中 10-GPIO Page 338 介绍; - 3.定义 LED 操作标号 :
light_led :, 可以在其它位置通过 跳转到 该标号处执行 LED 灯打开的操作; - 4.装载控制寄存器地址 : 首先将 GPM 控制寄存器地址装载到 r0 中, 以方便之后访问这个地址,
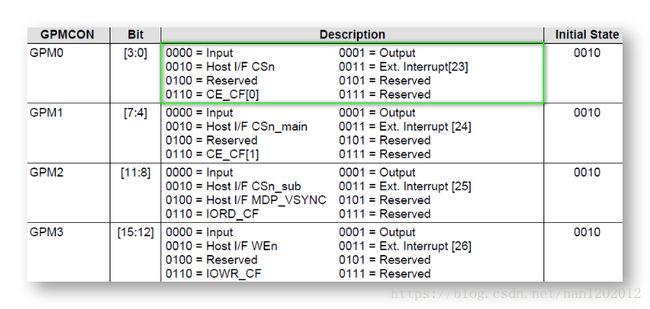
ldr r0, =GPBCON, 其中 将 0x7F008820 地址装载到了 r0 寄存器中,GPBCON是之前定义的 GPM 控制器地址 的常量 ; - 5.计算 GPM 控制寄存器值 : 下图是 GPM 控制寄存器的值, 4个 LED 灯分别由 GPM0, GPM1, GPM2, GPM3 控制, 因此需要**将 GPM0, GPM1, GPM2, GPM3 对应的控制器设置成输出模式**, 每一位设置占 4 位, 即设置成 0x1 即可, 前 0 ~ 15 位 设置成 0x1111, GPM4 和 GPM5 的内容不需要, 因此设置成0 即可, 最后该寄存器的值设置成 0x1111 即可; 代码为
ldr r1, =0x1111;
- 6.将 值 正式存储到 GPM 控制寄存器中 : 使用 str 指令, 将 r1 中的值 存储到 GPM 控制寄存器中, 代码为
str r1, [r0], 解读 : 将 r1 中的值 存储到 r0 指向的地址的内存中 ;
此时还未完成, 如果烧写该程序, 会出现无法点亮 LED 灯的情况, OK6410 开发板还需要进行外设基地址初始化步骤;
###(2) 外设端口基地址初始化
参考手册 : ARM核 手册 Arm1176jzfs.pdf ( 基于 OK6410 开发板 ARM 11 )
- 1.手册对应章节 : ***3 章节 ***;
- 2.S3C6410X.pdf手册下载地址 :
外设端口基地址初始化 步骤 :
- 1.C15 寄存器 ( 外设端口内存映射寄存器 ) 简介 : 控制外设基地址的寄存器的是 C15 寄存器;
- 2.设置汇编模块标号 : 设置一个标号, 方便汇编语句跳转, 代码
set_serial_port :; - 3.将基地址装载到 r0 寄存器中 : 查找 OK6410 开发板的 外设基地址, 在 S3C6410X.pdf 文档中查询到, 基地址值为
0x70000000; 使用ldr r0, =0x70000000语句将基地址值 0x70000000 立即数值 装载到 r0 寄存器中;- ① 语法解析 : 区分
ldr r0, =0x70000000和ldr r0, 0x70000000语句, 前者是将 立即数 0x7000000 装载到 r0 寄存器中, 后者是将 数字 0x70000000 的地址 装载到 r0 寄存器中;

- ① 语法解析 : 区分
- 4.设置外设端口内存映射寄存器 值 : 下图的表就是该寄存器设置位说明, 我们要初始化 256M 内存, [4:0] 位 设置成 0b10011, 即 0x13, 整个寄存器的值应该是 0x70000000 与 0x13 进行与操作, 代码为
orr r0, r0, #0x13;

- 5.将 r0 寄存器中的值传递给 C15 协处理器 : 根据下图 c15 协处理器 的 CRn Op1 CRm Op2 , 使用 mcr 指令, 将 r0 值 传给 c15 寄存器; 语句为
mcr p15, 0, r0, c15, c2, 4;- ① 语法说明 :
MCR p,o,Rd,CRN,CRM,q将 rd 寄存器值 传递给 CRN 协处理器,
- ① 语法说明 :
- 6.跳转回原来的位置 :
mov pc, lr, 该标号处代码执行完毕, 跳转回调用处继续执行下面的内容; - 7.整体代码 :
set_serial_port :
ldr r0, =0x70000000 @ 将基地址装载到 r0 寄存器中, 该基地址 在 arm 核 手册中定义
orr r0, r0, #0x13 @ 设置初始化基地址的范围, 将 r0 中的值 与 0x13 立即数 进行或操作, 将结果存放到 r0 中
mcr p15, 0, r0, c15, c2, 4 @ 将 r0 中的值设置给 c15 协处理器
mov pc, lr
###(3) 完整汇编代码
完整汇编代码 : 详细注释版本 ;
@****************************
@File:start.S
@
@BootLoader 初始化代码
@****************************
.text @ 宏 指明代码段
.global _start @ 伪指令声明全局开始符号
_start: @ 程序入口标志
b reset @ reset 复位异常
ldr pc, _undefined_instruction @ 未定义异常, 将 _undefined_instruction 值装载到 pc 指针中
ldr pc, _software_interrupt @ 软中断异常
ldr pc, _prefetch_abort @ 预取指令异常
ldr pc, _data_abort @ 数据读取异常
ldr pc, _not_used @ 占用 0x00000014 地址
ldr pc, _irq @ 普通中断异常
ldr pc, _fiq @ 软中断异常
_undefined_instruction: .word undefined_instruction @ _undefined_instruction 标号存放了一个值, 该值是 32 位地址 undefined_instruction, undefined_instruction 是一个地址
_software_interrupt: .word software_interrupt @ 软中断异常
_prefetch_abort: .word prefetch_abort @ 预取指令异常 处理
_data_abort: .word data_abort @ 数据读取异常
_not_used: .word not_used @ 空位处理
_irq: .word irq @ 普通中断处理
_fiq: .word fiq @ 快速中断处理
undefined_instruction: @ undefined_instruction 地址存放要执行的内容
nop
software_interrupt: @ software_interrupt 地址存放要执行的内容
nop
prefetch_abort: @ prefetch_abort 地址存放要执行的内容
nop
data_abort: @ data_abort 地址存放要执行的内容
nop
not_used: @ not_used 地址存放要执行的内容
nop
irq: @ irq 地址存放要执行的内容
nop
fiq: @ fiq 地址存放要执行的内容
nop
reset: @ reset 地址存放要执行的内容
bl set_svc @ 跳转到 set_svc 标号处执行
bl set_serial_port @ 设置外设基地址端口初始化
bl disable_watchdog @ 跳转到 disable_watchdog 标号执行, 关闭看门狗
bl disable_interrupt @ 跳转到 disable_interrupt 标号执行, 关闭中断
bl disable_mmu @ 跳转到 disable_mmu 标号执行, 关闭 MMU
bl light_led @ 打开开发板上的 LED 发光二极管
set_svc:
mrs r0, cpsr @ 将 CPSR 寄存器中的值 导出到 R0 寄存器中
bic r0, r0, #0x1f @ 将 R0 寄存器中的值 与 #0x1f 立即数 进行与操作, 并将结果保存到 R0 寄存器中, 实际是将寄存器的 0 ~ 4 位 置 0
orr r0, r0, #0xd3 @ 将 R0 寄存器中的值 与 #0xd3 立即数 进行或操作, 并将结果保存到 R0 寄存器中, 实际是设置 0 ~ 4 位 寄存器值 的处理器工作模式代码
msr cpsr, r0 @ 将 R0 寄存器中的值 保存到 CPSR 寄存器中
mov pc, lr @ 返回到 返回点处 继续执行后面的代码
#define pWTCON 0x7e004000 @ 定义看门狗控制寄存器 地址 ( 6410开发板 )
disable_watchdog:
ldr r0, =pWTCON @ 先将控制寄存器地址保存到通用寄存器中
mov r1, #0x0 @ 准备一个 0 值, 看门狗控制寄存器都设置为0 , 即看门狗也关闭了
str r1, [r0] @ 将 0 值 设置到 看门狗控制寄存器中
mov pc, lr @ 返回到 返回点处 继续执行后面的代码
disable_interrupt:
mvn r1,#0x0 @ 将 0x0 按位取反, 获取 全 1 的数据, 设置到 R1 寄存器中
ldr r0,=0x71200014 @ 设置第一个中断屏蔽寄存器, 先将 寄存器 地址装载到 通用寄存器 R0 中
str r1,[r0] @ 再将 全 1 的值设置到 寄存器中, 该寄存器的内存地址已经装载到了 R0 通用寄存器中
ldr r0,=0x71300014 @ 设置第二个中断屏蔽寄存器, 先将 寄存器 地址装载到 通用寄存器 R0 中
str r1,[r0] @ 再将 全 1 的值设置到 寄存器中, 该寄存器的内存地址已经装载到了 R0 通用寄存器中
mov pc, lr @ 返回到 返回点处 继续执行后面的代码
disable_mmu :
mcr p15,0,r0,c7,c7,0 @ 设置 I-Cache 和 D-Cache 失效
mrc p15,0,r0,c1,c0,0 @ 将 c1 寄存器中的值 读取到 R0 通用寄存器中
bic r0, r0, #0x00000007 @ 使用 bic 位清除指令, 将 R0 寄存器中的 第 0, 1, 2 三位 设置成0, 代表 关闭 MMU 和 D-Cache
mcr p15,0,r0,c1,c0,0 @ 将 R0 寄存器中的值写回到 C1 寄存器中
mov pc, lr @ 返回到 返回点处 继续执行后面的代码
set_serial_port :
ldr r0, =0x70000000 @ 将基地址装载到 r0 寄存器中, 该基地址 在 arm 核 手册中定义
orr r0, r0, #0x13 @ 设置初始化基地址的范围, 将 r0 中的值 与 0x13 立即数 进行或操作, 将结果存放到 r0 中
mcr p15, 0, r0, c15, c2, 4 @ 将 r0 中的值设置给 c15 协处理器
mov pc, lr
#define GPBCON 0x7F008820
#define GPBDAT 0x7F008824
light_led :
ldr r0, =GPBCON @ 将 0x7F008820 GPM 控制寄存器的地址 0x7F008820 装载到 r0 寄存器中
ldr r1, =0x1111 @ 设置 GPM 控制寄存器的行为 为 Output 输出, 即每个对应引脚的设置为 0b0001 值
str r1, [r0] @ 将 r1 中的值 存储到 r0 指向的 GPBCON 0x7F008820 地址的内存中
ldr r0, =GPBDAT @ 将 GPBDAT 0x7F008824 地址值 装载到 r0 寄存器中
ldr r1, =0b110000 @ 计算 GPM 数据寄存器中的值, 设置 0 为 低电平, 设置 1 为高电平, 这里设置 0 ~ 3 位为低电平, 其它为高电平
str r1, [r0] @ 将 r1 中的值 存储到 r0 指向的 GPBDAT 0x7F008824 地址的内存中
mov pc, lr
##2. 链接器脚本
gboot.lds 链接器脚本 代码解析 :
- 1.指明输出格式 ( 处理器架构 ) : 使用
OUTPUT_ARCH(架构名称)指明***输出格式, 即处理器的架构***, 这里是 arm 架构的,OUTPUT_ARCH(arm); - 2.指明输出程序的入口 : 设置编译输出的程序入口位置, 语法为
ENTRY(入口位置), 在上面的 Start.S 中设置的程序入口是_start, 代码为ENTRY(_start); - 3.设置代码段 : 使用
.text :设置代码段; - 4.设置数据段 : 使用
.data :设置数据段; - 5.设置 BSS 段 : 使用
.bss :设置 BSS 段;- ( 1 ) 记录 BSS 段的起始地址 :
bss_start = .;; - ( 2 ) 记录 BSS 段的结束地址 :
bss_end = .;;
- ( 1 ) 记录 BSS 段的起始地址 :
- 6.对齐 : 每个段都需要设置内存的对齐格式, 使用
. = ALIGN(4);设置四字节对齐即可; - 7.代码示例 :
OUTPUT_ARCH(arm) /*指明处理器结构*/
ENTRY(_start) /*指明程序入口 在 _start 标号处*/
SECTIONS {
. = 0x50008000; /*整个程序链接的起始位置, 根据开发板确定, 不同开发板地址不一致*/
. = ALIGN(4); /*对齐处理, 每段开始之前进行 4 字节对齐*/
.text : /*代码段*/
{
start.o (.text) /*start.S 转化来的代码段*/
*(.text) /*其它代码段*/
}
. = ALIGN(4); /*对齐处理, 每段开始之前进行 4 字节对齐*/
.data : /*数据段*/
{
*(.data)
}
. = ALIGN(4); /*对齐处理, 每段开始之前进行 4 字节对齐*/
bss_start = .; /*记录 bss 段起始位置*/
.bss : /*bss 段*/
{
*(.bss)
}
bss_end = .; /*记录 bss 段结束位置*/
}
##3. Makefile 编译脚本
makefile 文件编写 :
- 1.通用规则 ( 汇编文件编译规则 ) : 汇编文件 编译 成同名的 .o 文件, 文件名称相同, 后缀不同,
%.o : %.S, 产生过程是arm-linux-gcc -g -c $^, 其中^标识是所有的依赖文件, 在该规则下 start.S 会被变异成 start.o ; - 2.通用规则 ( C 文件编译规则 ) : C 代码编译成同名的 .o 文件,
%.o : %.c, 产生过程是arm-linux-gcc -g -c $^; - 3.设置最终目标 : 使用
all:设置最终编译目标;- ( 1 ) 依赖文件 : 产生最终目标需要依赖 start.o 文件, 使用
all: start.o表示最终目标需要依赖该文件; - ( 2 ) 链接过程 :
arm-linux-ld -Tgboot.lds -o gboot.elf $^, 需要使用链接器脚本进行连接, ①链接工具是 arm-linux-ld 工具, ②使用-Tgboot.lds设置链接器脚本 是刚写的 gboot.lds 链接器脚本, ③输出文件是 gboot.elf 这是个中间文件, ④ 依赖文件是$^代表所有的依赖; - ( 3 ) 转换成可执行二进制文件 :
arm-linux-objcopy -O binary gboot.elf gboot.bin, 使用-O binary设置输出二进制文件, 依赖文件是gboot.elf, 输出的可执行二进制文件 即 结果是gboot.bin;
- ( 1 ) 依赖文件 : 产生最终目标需要依赖 start.o 文件, 使用
- 4.makefile 文件内容 :
all: start.o #依赖于 start.o
arm-linux-ld -Tgboot.lds -o gboot.elf $^ #使用链接器脚本, 将 start.o 转为 gboot.elf
arm-linux-objcopy -O binary gboot.elf gboot.bin #将 gboot.elf 转化为可以直接在板子上执行的 gboot.bin 文件
%.o : %.S #通用规则, 如 start.o 是由 start.S 编译来的, -c 是只编译不链接
arm-linux-gcc -g -c $^
%.o : %.c #通用规则, 如 start.o 是由 start.c 编译来的, -c 是只编译不链接
arm-linux-gcc -g -c $^
.PHONY: clean
clean: #清除编译信息
rm *.o *.elf *.bin
##4. 编译输出可执行文件
编译过程 :
- 1.文件准备 : 将 汇编代码 ( start.S ) 链接器脚本 ( gboot.lds ) makefile 文件 拷贝到编译目录 ;
- 2.执行编译命令 :
make; - 3.编译结果 : 可以看到 生成了 编译目标文件 start.o, 链接文件 gboot.elf, 可执行的二进制文件 gboot.bin ;

##5. 烧写代码到开发板并执行
###( 1 ) OK6410 开发板启动切换方式
OK6410 开发板启动切换方式 : 通过控制 开发板右侧的 8个开关来设置启动来源;
- 1.sd 卡启动 : (1~8) 位置 : 0, 0, 0, 1, 1, 1, 1, 1;
- 2.nand flash 启动 : (1~8) 位置 : x, x, x, 1, 1, 0, 0, 1;
- 3.nor flash 启动 : (1~8) 位置 : x, x, x, 1, 0, 1, 0, x;
###( 2 ) 制作 SD 卡启盘 并 准备程序
制作 SD 卡启动盘 :
- 1.找到开发板的烧写工具 : OK6410-A 开发板的烧写工具 在开发光盘 A 的 OK6410-A-1G用户光盘(A)-20160812\Linux-3.0.1\Linux烧写工具 目录下, 开发板光盘资料下载地址 ;

- 2.设置 SD_Writer.exe 属性 ( win10系统需要进行的设置 ) : 右键点击属性, 在兼容性一栏, 设置 以 Windows 7 兼容模式运行, 并设置 以管理员身份运行此程序 ;

- 3.先格式化 SD 卡 : 注意这里要使用 SD_Writer 中的 format 功能进行格式化 , 按照下面的步骤, 一步一步点击确定执行 ;



- 4.选择要烧写的文件 : 这里选择 OK6410-A-1G用户光盘(A)-20160812\Linux-3.0.1\Linux烧写工具\mmc_ram256.bin 文件;
- 5.烧写文件到 SD 卡中 : 直接点击 Program 按钮, 就将启动程序烧写到了 SD 卡中;

- 6.准备 LED 灯程序 : 将编译出的 gboot.bin 文件名修改成 u-boot.bin, 必须修改成该文件名, 否则无法烧写上去;
- 7.将程序拷贝到 SD 卡中 : 将程序直接拷贝到 SD 卡中即可;
参考资料 : OK6410烧写裸板程序方法
这是之前写过的博客, 仅作为参考;
###( 3 ) SecureCRT 连接开发板并烧写程序
SecureCRT 连接开发板并烧写程序 步骤 :
- 1.硬件连接操作 : 使用 USB 转 串口工具 将电脑 与 开发板链接, USB 插在电脑端, 串口端插在 开发板上, 插上电源适配器, 但是不要打开电源开关;
- 2.开发板设置 : 将开发板右侧的开关设置成 SD 卡启动, 即 (1~8) 位置 : 0, 0, 0, 1, 1, 1, 1, 1; 该步骤很重要;
- 2.查询串口端口号 : 在设备管理器中查看串口端口号, 这里可以看到是 COM9;

- 3.SecureCRT 连接串口 : 打开 SecureCRT 软件, 点击快速连接, 然后在弹出的对话框中按照下面进行配置, ① 首先要选择 Serial 协议, ② 然后选择端口, 这个端口从设备管理器中查看, ③ 波特率选择 115200, ④ 取消 RTS/CTS 选项;

- 4.打开开发板 ( 很重要 ) : 选中 SecureCRT 软件, 然后按住空格键不放, 这个操作很重要, 打开开发板开关, ① 先按住空格键, ②再打开开关;

- 5.首先格式化 Nand Flash : 选择 [1] 选项, 格式化 Nand Flash;

- 6.选择从 SD 卡中烧写 : 选择 [2] Burn image from SD card 选项, 从 SD 卡中向开发板烧写程序;

- 7.选择烧写 u-boot : 选择 [2] Flash u-boot, 烧写 u-boot, 会从 SD 卡中查找 u-boot.bin 文件, 然后烧写到 nand flash 中, 如果 SD 卡中 没有 u-boot.bin 会报错;

- 8.设置从 Nand Flash 启动 : 设置开发板上的启动开关, (1~8) 位置 : x, x, x, 1, 1, 0, 0, 1; 此时 四个 LED 全亮;
- 9.效果展示 : 设置的 GPBDAT 寄存器值为 0b110000, 四个 LED 灯都亮起来;

- 10.修改 LED 灯显示参数后显示结果 : 设置 GPBDAT 寄存器中值为 0b110101 是 第一个 和 第三个 LED 亮起来;
本博客的参考文章及相关资料下载 :
- 1.本博客代码及参考手册下载 : https://download.csdn.net/download/han1202012/10573310