强化学习经典算法笔记(十三):深度确定性策略梯度算法DDPG的pytorch实现
强化学习经典算法笔记(十三):深度确定性策略梯度算法DDPG的pytorch实现
一、DDPG算法的要点
- DDPG适用于连续动作空间的控制任务
- DDPG解决了DQN难以对连续动作估计Q值的问题
- 确定性策略是指:在某个状态 s t s_t st所采取的动作是确定的。由此带来了Bellman方程的改变。由
Q π ( s t , a t ) = E s t + 1 ∼ E , a t ∼ π [ r ( s t , a t ) + γ E π [ Q π ( s t + 1 , a t + 1 ) ] ] Q^{\pi}(s_t,a_t)=E_{s_{t+1}\sim E,a_t \sim \pi}[r(s_t,a_t)+\gamma E_{\pi}[Q^{\pi}(s_{t+1},a_{t+1})]] Qπ(st,at)=Est+1∼E,at∼π[r(st,at)+γEπ[Qπ(st+1,at+1)]]
变成了
Q μ ( s t , a t ) = E s t + 1 ∼ E [ r ( s t , a t ) + γ Q μ ( s t + 1 , μ ( s t + 1 ) ] Q^{\mu}(s_t,a_t)=E_{s_{t+1}\sim E}[r(s_t,a_t)+\gamma Q^{\mu}(s_{t+1},\mu(s_{t+1})] Qμ(st,at)=Est+1∼E[r(st,at)+γQμ(st+1,μ(st+1)]
区别在于确定性动作 μ ( s t ) \mu(s_t) μ(st)取代了从随机性策略中采样的动作 a t ∼ π ( a ∣ s t ) a_t \sim \pi(a|s_t) at∼π(a∣st),因此中括号内部对策略求期望的操作也省去了。只需要对环境求期望即可。
也就是说动作-状态值函数Q只和环境有关系,也就意味着外面可以使用off-policy来更新值函数(比如使用Q-learning方法等)。 - 使用Actor-critic框架,Actor输入状态,输出确定性动作,Critic输入状态和动作,输出Q值。
- 借鉴DQN,使用了Memory Buffer和Target Networks,对Critic网络做Off-policy的更新。
- 使用 soft target update,缓慢更新目标网络。
θ ′ ← τ θ + ( 1 − τ ) θ ′ , τ ≪ 1 \theta' \leftarrow \tau \theta + (1-\tau)\theta',\; \tau \ll 1 θ′←τθ+(1−τ)θ′,τ≪1 - 使用OU噪声,一种时序噪声,为确定性动作提供exploration的能力。
- 使用batch normalization。
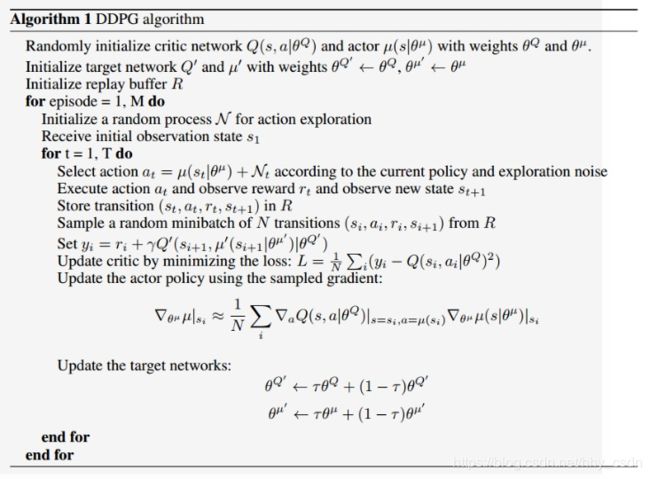

图片来自DDPG论文笔记。
二、DDPG的Pytorch实现
import torch
import torch.nn as nn
import torch.nn.functional as F
import numpy as np
import gym
import time
##################### hyper parameters ####################
MAX_EPISODES = 200 # 最大训练代数
MAX_EP_STEPS = 200 # episode最大持续帧数
RENDER = False
ENV_NAME = 'Pendulum-v0' # 游戏名称
SEED = 123 # 随机数种子
DDPG算法主体的实现。由于动作向量的取值范围是对称的,所以输入只有一个a_bound。
############################### DDPG ####################################
class DDPG(object):
def __init__(self, a_dim, s_dim, a_bound,):
self.a_dim = a_dim
self.s_dim = s_dim
self.a_bound = a_bound
self.pointer = 0 # exp buffer指针
self.lr_a = 0.001 # learning rate for actor
self.lr_c = 0.002 # learning rate for critic
self.gamma = 0.9 # reward discount
self.tau = 0.01 # 软更新比例
self.memory_capacity = 10000
self.batch_size = 32
self.memory = np.zeros((self.memory_capacity, s_dim * 2 + a_dim + 1), dtype=np.float32)
class ANet(nn.Module): # 定义动作网络
def __init__(self, s_dim, a_dim, a_bound):
super(ANet,self).__init__()
self.a_bound = a_bound
self.fc1 = nn.Linear(s_dim,30)
self.fc1.weight.data.normal_(0,0.1) # initialization
self.out = nn.Linear(30,a_dim)
self.out.weight.data.normal_(0,0.1) # initialization
def forward(self,x):
x = self.fc1(x)
x = F.relu(x)
x = self.out(x)
x = F.tanh(x)
actions_value = x * self.a_bound.item()
return actions_value
class CNet(nn.Module): # 定义价值网络
def __init__(self,s_dim,a_dim):
super(CNet,self).__init__()
self.fcs = nn.Linear(s_dim,30)
self.fcs.weight.data.normal_(0,0.1) # initialization
self.fca = nn.Linear(a_dim,30)
self.fca.weight.data.normal_(0,0.1) # initialization
self.out = nn.Linear(30,1)
self.out.weight.data.normal_(0, 0.1) # initialization
def forward(self,s,a):
x = self.fcs(s) # 输入状态
y = self.fca(a) # 输入动作
net = F.relu(x+y)
actions_value = self.out(net) # 给出V(s,a)
return actions_value
self.Actor_eval = ANet(s_dim, a_dim, a_bound) # 主网络
self.Actor_target = ANet(s_dim, a_dim, a_bound) # 目标网络
self.Critic_eval = CNet(s_dim, a_dim) # 主网络
self.Critic_target = CNet(s_dim, a_dim) # 当前网络
self.ctrain = torch.optim.Adam(self.Critic_eval.parameters(),lr = self.lr_c) # critic的优化器
self.atrain = torch.optim.Adam(self.Actor_eval.parameters(),lr = self.lr_a) # actor的优化器
self.loss_td = nn.MSELoss() # 损失函数采用均方误差
def choose_action(self, s):
s = torch.unsqueeze(torch.FloatTensor(s), 0)
return self.Actor_eval(s)[0].detach() # detach()不需要计算梯度
def learn(self):
for x in self.Actor_target.state_dict().keys():
eval('self.Actor_target.' + x + '.data.mul_((1 - self.tau))')
eval('self.Actor_target.' + x + '.data.add_(self.tau * self.Actor_eval.' + x + '.data)')
for x in self.Critic_target.state_dict().keys():
eval('self.Critic_target.' + x + '.data.mul_((1- self.tau))')
eval('self.Critic_target.' + x + '.data.add_(self.tau * self.Critic_eval.' + x + '.data)')
# soft target replacement
indices = np.random.choice(self.memory_capacity, size = self.batch_size) # 随机采样的index
bt = self.memory[indices, :] # 采样batch_size个sample
bs = torch.FloatTensor(bt[:, :self.s_dim]) # state
ba = torch.FloatTensor(bt[:, self.s_dim: self.s_dim + self.a_dim]) # action
br = torch.FloatTensor(bt[:, -self.s_dim - 1: -self.s_dim]) # reward
bs_ = torch.FloatTensor(bt[:, -self.s_dim:]) # next state
a = self.Actor_eval(bs)
q = self.Critic_eval(bs,a) # loss=-q=-ce(s,ae(s))更新ae ae(s)=a ae(s_)=a_
# 如果 a是一个正确的行为的话,那么它的Q应该更贴近0
loss_a = -torch.mean(q)
# print(q)
# print(loss_a)
self.atrain.zero_grad()
loss_a.backward()
self.atrain.step()
a_ = self.Actor_target(bs_) # 这个网络不及时更新参数, 用于预测 Critic 的 Q_target 中的 action
q_ = self.Critic_target(bs_,a_) # 这个网络不及时更新参数, 用于给出 Actor 更新参数时的 Gradient ascent 强度
q_target = br + self.gamma * q_ # q_target = 负的
#print(q_target)
q_v = self.Critic_eval(bs,ba)
#print(q_v)
td_error = self.loss_td(q_target,q_v)
# td_error = R + self.gamma * ct(bs_,at(bs_))-ce(s,ba) 更新ce ,但这个ae(s)是记忆中的ba,让ce得出的Q靠近Q_target,让评价更准确
#print(td_error)
self.ctrain.zero_grad()
td_error.backward()
self.ctrain.step()
def store_transition(self, s, a, r, s_):
transition = np.hstack((s, a, [r], s_))
index = self.pointer % self.memory_capacity # replace the old memory with new memory
self.memory[index, :] = transition
self.pointer += 1 # 指示sample位置的指针+1
训练代码。
############################### training ####################################
env = gym.make(ENV_NAME)
env = env.unwrapped
env.seed(SEED) # 设置Gym的随机数种子
torch.manual_seed(SEED) # 设置pytorch的随机数种子
s_dim = env.observation_space.shape[0] # 状态空间
a_dim = env.action_space.shape[0] # 动作空间
a_bound = env.action_space.high # 动作取值区间,对称区间,故只取上界
ddpg = DDPG(a_dim, s_dim, a_bound)
var = 3 # 动作服从的高斯分布的方差,控制探索程度
t1 = time.time() # 开始时间
for i in range(MAX_EPISODES):
s = env.reset()
ep_reward = 0
for j in range(MAX_EP_STEPS):
if RENDER:
env.render()
# Add exploration noise
a = ddpg.choose_action(s)
a = np.clip(np.random.normal(a, var), -2, 2) # add randomness to action selection for exploration
s_, r, done, info = env.step(a)
ddpg.store_transition(s, a, r / 10, s_) # 为什么要对reward归一化
if ddpg.pointer > ddpg.memory_capacity: # 经验池已满
var *= .9995 # 学习阶段逐渐降低动作随机性decay the action randomness
ddpg.learn() # 开始学习
s = s_
ep_reward += r
if j == MAX_EP_STEPS-1:
print('Episode:', i, ' Reward: %i' % int(ep_reward), 'Explore: %.2f' % var, )
# if ep_reward > -300:
# RENDER = True
break
print('Running time: ', time.time() - t1)