运动跟踪(一):calcOpticalFlowFarneback(),稠密光流法
关于金字塔LK光流的Demo已经在上一篇的blog中说明了,地址:https://blog.csdn.net/liangchunjiang/article/details/79869830
测试OpenCV的函数calcOpticalFlowFarneback()的效果
void cv::calcOpticalFlowFarneback( InputArray _prev0, InputArray _next0,
OutputArray _flow0, double pyr_scale, int levels, int winsize,
int iterations, int poly_n, double poly_sigma, int flags )
// 参数说明如下:
// _prev0:输入前一帧图像
// _next0:输入后一帧图像
// _flow0:输出的光流
// pyr_scale:金字塔上下两层之间的尺度关系
// levels:金字塔层数
// winsize:均值窗口大小,越大越能denoise并且能够检测快速移动目标,但会引起模糊运动区域
// iterations:迭代次数
// poly_n:像素领域大小,一般为5,7等
// poly_sigma:高斯标注差,一般为1-1.5
// flags:计算方法。主要包括OPTFLOW_USE_INITIAL_FLOW和OPTFLOW_FARNEBACK_GAUSSIAN(1)OpenCV Demo
#include "stdafx.h"
#include "opencv2/video/tracking.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include
using namespace cv;
using namespace std;
static void help()
{
cout <<
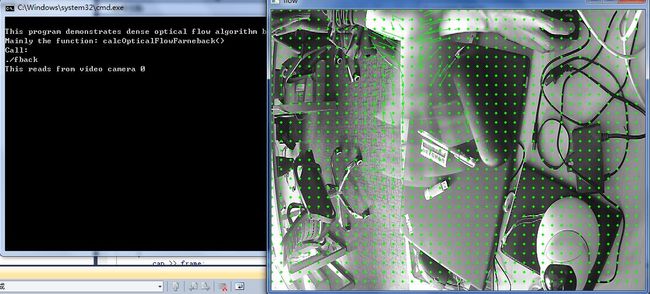
"\nThis program demonstrates dense optical flow algorithm by Gunnar Farneback\n"
"Mainly the function: calcOpticalFlowFarneback()\n"
"Call:\n"
"./fback\n"
"This reads from video camera 0\n" << endl;
}
static void drawOptFlowMap(const Mat& flow, Mat& cflowmap, int step,
double, const Scalar& color)
{
for(int y = 0; y < cflowmap.rows; y += step)
for(int x = 0; x < cflowmap.cols; x += step)
{
const Point2f& fxy = flow.at(y, x);
line(cflowmap, Point(x,y), Point(cvRound(x+fxy.x), cvRound(y+fxy.y)),
color);
circle(cflowmap, Point(x,y), 2, color, -1);
}
}
int main(int, char**)
{
VideoCapture cap(0);
help();
if( !cap.isOpened() )
return -1;
Mat prevgray, gray, flow, cflow, frame;
namedWindow("flow", 1);
for(;;)
{
cap >> frame;
cvtColor(frame, gray, COLOR_BGR2GRAY);
if( prevgray.data )
{
calcOpticalFlowFarneback(prevgray, gray, flow, 0.5, 3, 15, 3, 5, 1.2, 0);
cvtColor(prevgray, cflow, COLOR_GRAY2BGR);
drawOptFlowMap(flow, cflow, 16, 1.5, Scalar(0, 255, 0));
imshow("flow", cflow);
}
if(waitKey(30)>=0)
break;
std::swap(prevgray, gray);
}
return 0;
}
参考:
https://blog.csdn.net/yzhang6_10/article/details/51225545