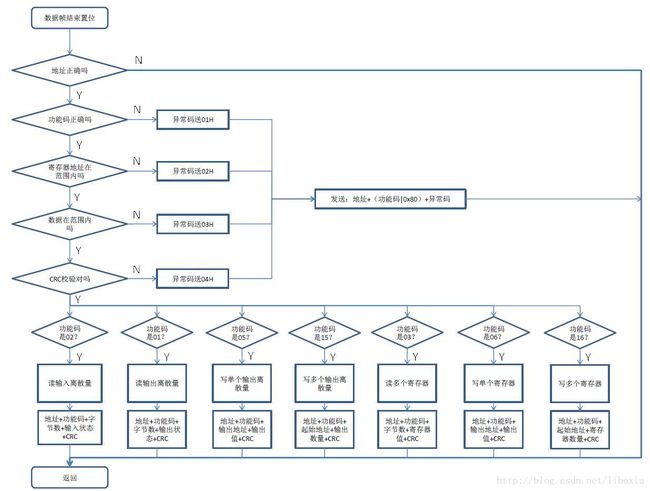
一个ModBus RTU程序(支持01、02、03、05、06、15、16功能码)
有两点需要注意的:1、modbus rtu标准协议规定:每帧数据间隔至少为3.5个字符时间。 2、接收发送数据最好改为中断模式,不然通信速度不够。
#include "RS485.h"
#include "CRC.h"
///////////////////////////////////////////////////////////
u32 RS485_Baudrate=9600;//通讯波特率
u8 RS485_Parity=0;//0无校验;1奇校验;2偶校验
u8 RS485_Addr=1;//从机地址
u16 RS485_Frame_Distance=4;//数据帧最小间隔(ms),超过此时间则认为是下一帧
u8 RS485_RX_BUFF[2048];//接收缓冲区2048字节
u16 RS485_RX_CNT=0;//接收计数器
u8 RS485_FrameFlag=0;//帧结束标记
u8 RS485_TX_BUFF[2048];//发送缓冲区
u16 RS485_TX_CNT=0;//发送计数器
////////////////////////////////////////////////////////////////////////////////////////////////////////////
//Modbus寄存器和单片机寄存器的映射关系
vu32 *Modbus_InputIO[100];//输入开关量寄存器指针(这里使用的是位带操作)
vu32 *Modbus_OutputIO[100];//输出开关量寄存器指针(这里使用的是位带操作)
u16 *Modbus_HoldReg[1000];//保持寄存器指针
u32 testData1=256,testData2=512;
void Modbus_RegMap(void)
{
//输入开关量寄存器指针指向
Modbus_InputIO[0]=(vu32*)&PEin(4);//KEY0
Modbus_InputIO[1]=(vu32*)&PEin(3);//KEY1
Modbus_InputIO[2]=(vu32*)&PEin(2);//KEY2
Modbus_InputIO[3]=(vu32*)&PAin(0);//KEY3
//输出开关量寄存器指针指向
Modbus_OutputIO[0]=(vu32*)&PBout(5);//LED0
Modbus_OutputIO[1]=(vu32*)&PEout(5);//LED1
//保持寄存器指针指向
Modbus_HoldReg[0]=(u16*)&testData1;//测试数据1
Modbus_HoldReg[1]=((u16*)&testData1)+1;//测试数据1
Modbus_HoldReg[2]=(u16*)&testData2;//测试数据2
Modbus_HoldReg[3]=((u16*)&testData2)+1;//测试数据2
}
/////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
//初始化USART2
void RS485_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOG,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_2;//PA2(TX)复用推挽输出
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
GPIO_SetBits(GPIOA,GPIO_Pin_2);//默认高电平
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_3;//PA3(RX)输入上拉
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;
GPIO_Init(GPIOA,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_9;//PG9(RE/DE)通用推挽输出
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_Init(GPIOG,&GPIO_InitStructure);
GPIO_ResetBits(GPIOG,GPIO_Pin_9);//默认接收状态
USART_DeInit(USART2);//复位串口2
USART_InitStructure.USART_BaudRate=RS485_Baudrate;
USART_InitStructure.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
USART_InitStructure.USART_WordLength=USART_WordLength_8b;
USART_InitStructure.USART_StopBits=USART_StopBits_1;
USART_InitStructure.USART_Mode=USART_Mode_Rx|USART_Mode_Tx;//收发模式
switch(RS485_Parity)
{
case 0:USART_InitStructure.USART_Parity=USART_Parity_No;break;//无校验
case 1:USART_InitStructure.USART_Parity=USART_Parity_Odd;break;//奇校验
case 2:USART_InitStructure.USART_Parity=USART_Parity_Even;break;//偶校验
}
USART_Init(USART2,&USART_InitStructure);
USART_ClearITPendingBit(USART2,USART_IT_RXNE);
USART_ITConfig(USART2,USART_IT_RXNE,ENABLE);//使能串口2接收中断
NVIC_InitStructure.NVIC_IRQChannel=USART2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority=2;
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_Init(&NVIC_InitStructure);
USART_Cmd(USART2,ENABLE);//使能串口2
RS485_TX_EN=0;//默认为接收模式
Timer7_Init();//定时器7初始化,用于监视空闲时间
Modbus_RegMap();//Modbus寄存器映射
}
//定时器7初始化
void Timer7_Init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM7, ENABLE); //TIM7时钟使能
//TIM7初始化设置
TIM_TimeBaseStructure.TIM_Period = RS485_Frame_Distance*10; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =7200; //设置用来作为TIMx时钟频率除数的预分频值 设置计数频率为10kHz
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM7, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM_ITConfig( TIM7, TIM_IT_Update, ENABLE );//TIM7 允许更新中断
//TIM7中断分组配置
NVIC_InitStructure.NVIC_IRQChannel =TIM7_IRQn; //TIM7中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //先占优先级2级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
}
//////////////////////////////////////////////////////////////////////////////
//发送n个字节数据
//buff:发送区首地址
//len:发送的字节数
void RS485_SendData(u8 *buff,u8 len)
{
RS485_TX_EN=1;//切换为发送模式
while(len--)
{
while(USART_GetFlagStatus(USART2,USART_FLAG_TXE)==RESET);//等待发送区为空
USART_SendData(USART2,*(buff++));
}
while(USART_GetFlagStatus(USART2,USART_FLAG_TC)==RESET);//等待发送完成
}
/////////////////////////////////////////////////////////////////////////////////////
void USART2_IRQHandler(void)//串口2中断服务程序
{
u8 res;
u8 err;
if(USART_GetITStatus(USART2,USART_IT_RXNE)!=RESET)
{
if(USART_GetFlagStatus(USART2,USART_FLAG_NE|USART_FLAG_FE|USART_FLAG_PE)) err=1;//检测到噪音、帧错误或校验错误
else err=0;
res=USART_ReceiveData(USART2); //读接收到的字节,同时相关标志自动清除
if((RS485_RX_CNT<2047)&&(err==0))
{
RS485_RX_BUFF[RS485_RX_CNT]=res;
RS485_RX_CNT++;
TIM_ClearITPendingBit(TIM7,TIM_IT_Update);//清除定时器溢出中断
TIM_SetCounter(TIM7,0);//当接收到一个新的字节,将定时器7复位为0,重新计时(相当于喂狗)
TIM_Cmd(TIM7,ENABLE);//开始计时
}
}
}
///////////////////////////////////////////////////////////////////////////////////////
//用定时器7判断接收空闲时间,当空闲时间大于指定时间,认为一帧结束
//定时器7中断服务程序
void TIM7_IRQHandler(void)
{
if(TIM_GetITStatus(TIM7,TIM_IT_Update)!=RESET)
{
TIM_ClearITPendingBit(TIM7,TIM_IT_Update);//清除中断标志
TIM_Cmd(TIM7,DISABLE);//停止定时器
RS485_TX_EN=1;//停止接收,切换为发送状态
RS485_FrameFlag=1;//置位帧结束标记
}
}
/////////////////////////////////////////////////////////////////////////////////////
//RS485服务程序,用于处理接收到的数据(请在主函数中循环调用)
u16 startRegAddr;
u16 RegNum;
u16 calCRC;
void RS485_Service(void)
{
u16 recCRC;
if(RS485_FrameFlag==1)
{
if(RS485_RX_BUFF[0]==RS485_Addr)//地址正确
{
if((RS485_RX_BUFF[1]==01)||(RS485_RX_BUFF[1]==02)||(RS485_RX_BUFF[1]==03)||(RS485_RX_BUFF[1]==05)||(RS485_RX_BUFF[1]==06)||(RS485_RX_BUFF[1]==15)||(RS485_RX_BUFF[1]==16))//功能码正确
{
startRegAddr=(((u16)RS485_RX_BUFF[2])<<8)|RS485_RX_BUFF[3];//获取寄存器起始地址
if(startRegAddr<1000)//寄存器地址在范围内
{
calCRC=CRC_Compute(RS485_RX_BUFF,RS485_RX_CNT-2);//计算所接收数据的CRC
recCRC=RS485_RX_BUFF[RS485_RX_CNT-2]|(((u16)RS485_RX_BUFF[RS485_RX_CNT-1])<<8);//接收到的CRC(低字节在前,高字节在后)
if(calCRC==recCRC)//CRC校验正确
{
/////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
switch(RS485_RX_BUFF[1])//根据不同的功能码进行处理
{
case 2://读输入开关量
{
Modbus_02_Solve();
break;
}
case 1://读输出开关量
{
Modbus_01_Solve();
break;
}
case 5://写单个输出开关量
{
Modbus_05_Solve();
break;
}
case 15://写多个输出开关量
{
Modbus_15_Solve();
break;
}
case 03: //读多个寄存器
{
Modbus_03_Solve();
break;
}
case 06: //写单个寄存器
{
Modbus_06_Solve();
break;
}
case 16: //写多个寄存器
{
Modbus_16_Solve();
break;
}
}
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
}
else//CRC校验错误
{
RS485_TX_BUFF[0]=RS485_RX_BUFF[0];
RS485_TX_BUFF[1]=RS485_RX_BUFF[1]|0x80;
RS485_TX_BUFF[2]=0x04; //异常码
RS485_SendData(RS485_TX_BUFF,3);
}
}
else//寄存器地址超出范围
{
RS485_TX_BUFF[0]=RS485_RX_BUFF[0];
RS485_TX_BUFF[1]=RS485_RX_BUFF[1]|0x80;
RS485_TX_BUFF[2]=0x02; //异常码
RS485_SendData(RS485_TX_BUFF,3);
}
}
else//功能码错误
{
RS485_TX_BUFF[0]=RS485_RX_BUFF[0];
RS485_TX_BUFF[1]=RS485_RX_BUFF[1]|0x80;
RS485_TX_BUFF[2]=0x01; //异常码
RS485_SendData(RS485_TX_BUFF,3);
}
}
RS485_FrameFlag=0;//复位帧结束标志
RS485_RX_CNT=0;//接收计数器清零
RS485_TX_EN=0;//开启接收模式
}
}
//Modbus功能码02处理程序
//读输入开关量
void Modbus_02_Solve(void)
{
u16 ByteNum;
u16 i;
RegNum= (((u16)RS485_RX_BUFF[4])<<8)|RS485_RX_BUFF[5];//获取寄存器数量
if((startRegAddr+RegNum)<100)//寄存器地址+数量在范围内
{
RS485_TX_BUFF[0]=RS485_RX_BUFF[0];
RS485_TX_BUFF[1]=RS485_RX_BUFF[1];
ByteNum=RegNum/8;//字节数
if(RegNum%8) ByteNum+=1;//如果位数还有余数,则字节数+1
RS485_TX_BUFF[2]=ByteNum;//返回要读取的字节数
for(i=0;iif(i%8==0) RS485_TX_BUFF[3+i/8]=0x00;
RS485_TX_BUFF[3+i/8]>>=1;//低位先发送
RS485_TX_BUFF[3+i/8]|=((*Modbus_InputIO[startRegAddr+i])<<7)&0x80;
if(i==RegNum-1)//发送到最后一个位了
{
if(RegNum%8) RS485_TX_BUFF[3+i/8]>>=8-(RegNum%8);//如果最后一个字节还有余数,则剩余MSB填充0
}
}
calCRC=CRC_Compute(RS485_TX_BUFF,ByteNum+3);
RS485_TX_BUFF[ByteNum+3]=calCRC&0xFF;
RS485_TX_BUFF[ByteNum+4]=(calCRC>>8)&0xFF;
RS485_SendData(RS485_TX_BUFF,ByteNum+5);
}
else//寄存器地址+数量超出范围
{
RS485_TX_BUFF[0]=RS485_RX_BUFF[0];
RS485_TX_BUFF[1]=RS485_RX_BUFF[1]|0x80;
RS485_TX_BUFF[2]=0x02; //异常码
RS485_SendData(RS485_TX_BUFF,3);
}
}
//Modbus功能码01处理程序
//读输出开关量
void Modbus_01_Solve(void)
{
u16 ByteNum;
u16 i;
RegNum= (((u16)RS485_RX_BUFF[4])<<8)|RS485_RX_BUFF[5];//获取寄存器数量
if((startRegAddr+RegNum)<100)//寄存器地址+数量在范围内
{
RS485_TX_BUFF[0]=RS485_RX_BUFF[0];
RS485_TX_BUFF[1]=RS485_RX_BUFF[1];
ByteNum=RegNum/8;//字节数
if(RegNum%8) ByteNum+=1;//如果位数还有余数,则字节数+1
RS485_TX_BUFF[2]=ByteNum;//返回要读取的字节数
for(i=0;iif(i%8==0) RS485_TX_BUFF[3+i/8]=0x00;
RS485_TX_BUFF[3+i/8]>>=1;//低位先发送
RS485_TX_BUFF[3+i/8]|=((*Modbus_OutputIO[startRegAddr+i])<<7)&0x80;
if(i==RegNum-1)//发送到最后一个位了
{
if(RegNum%8) RS485_TX_BUFF[3+i/8]>>=8-(RegNum%8);//如果最后一个字节还有余数,则剩余MSB填充0
}
}
calCRC=CRC_Compute(RS485_TX_BUFF,ByteNum+3);
RS485_TX_BUFF[ByteNum+3]=calCRC&0xFF;
RS485_TX_BUFF[ByteNum+4]=(calCRC>>8)&0xFF;
RS485_SendData(RS485_TX_BUFF,ByteNum+5);
}
else//寄存器地址+数量超出范围
{
RS485_TX_BUFF[0]=RS485_RX_BUFF[0];
RS485_TX_BUFF[1]=RS485_RX_BUFF[1]|0x80;
RS485_TX_BUFF[2]=0x02; //异常码
RS485_SendData(RS485_TX_BUFF,3);
}
}
//Modbus功能码05处理程序
//写单个输出开关量
void Modbus_05_Solve(void)
{
if(startRegAddr<100)//寄存器地址在范围内
{
if((RS485_RX_BUFF[4]==0xFF)||(RS485_RX_BUFF[5]==0xFF)) *Modbus_OutputIO[startRegAddr]=0x01;
else *Modbus_OutputIO[startRegAddr]=0x00;
RS485_TX_BUFF[0]=RS485_RX_BUFF[0];
RS485_TX_BUFF[1]=RS485_RX_BUFF[1];
RS485_TX_BUFF[2]=RS485_RX_BUFF[2];
RS485_TX_BUFF[3]=RS485_RX_BUFF[3];
RS485_TX_BUFF[4]=RS485_RX_BUFF[4];
RS485_TX_BUFF[5]=RS485_RX_BUFF[5];
calCRC=CRC_Compute(RS485_TX_BUFF,6);
RS485_TX_BUFF[6]=calCRC&0xFF;
RS485_TX_BUFF[7]=(calCRC>>8)&0xFF;
RS485_SendData(RS485_TX_BUFF,8);
}
else//寄存器地址超出范围
{
RS485_TX_BUFF[0]=RS485_RX_BUFF[0];
RS485_TX_BUFF[1]=RS485_RX_BUFF[1]|0x80;
RS485_TX_BUFF[2]=0x02; //异常码
RS485_SendData(RS485_TX_BUFF,3);
}
}
//Modbus功能码15处理程序
//写多个输出开关量
void Modbus_15_Solve(void)
{
u16 i;
RegNum=(((u16)RS485_RX_BUFF[4])<<8)|RS485_RX_BUFF[5];//获取寄存器数量
if((startRegAddr+RegNum)<100)//寄存器地址+数量在范围内
{
for(i=0;iif(RS485_RX_BUFF[7+i/8]&0x01) *Modbus_OutputIO[startRegAddr+i]=0x01;
else *Modbus_OutputIO[startRegAddr+i]=0x00;
RS485_RX_BUFF[7+i/8]>>=1;//从低位开始
}
RS485_TX_BUFF[0]=RS485_RX_BUFF[0];
RS485_TX_BUFF[1]=RS485_RX_BUFF[1];
RS485_TX_BUFF[2]=RS485_RX_BUFF[2];
RS485_TX_BUFF[3]=RS485_RX_BUFF[3];
RS485_TX_BUFF[4]=RS485_RX_BUFF[4];
RS485_TX_BUFF[5]=RS485_RX_BUFF[5];
calCRC=CRC_Compute(RS485_TX_BUFF,6);
RS485_TX_BUFF[6]=calCRC&0xFF;
RS485_TX_BUFF[7]=(calCRC>>8)&0xFF;
RS485_SendData(RS485_TX_BUFF,8);
}
else//寄存器地址+数量超出范围
{
RS485_TX_BUFF[0]=RS485_RX_BUFF[0];
RS485_TX_BUFF[1]=RS485_RX_BUFF[1]|0x80;
RS485_TX_BUFF[2]=0x02; //异常码
RS485_SendData(RS485_TX_BUFF,3);
}
}
//Modbus功能码03处理程序
//读保持寄存器
void Modbus_03_Solve(void)
{
u8 i;
RegNum= (((u16)RS485_RX_BUFF[4])<<8)|RS485_RX_BUFF[5];//获取寄存器数量
if((startRegAddr+RegNum)<1000)//寄存器地址+数量在范围内
{
RS485_TX_BUFF[0]=RS485_RX_BUFF[0];
RS485_TX_BUFF[1]=RS485_RX_BUFF[1];
RS485_TX_BUFF[2]=RegNum*2;
for(i=0;i3+i*2]=*Modbus_HoldReg[startRegAddr+i]&0xFF;//先发送低字节
RS485_TX_BUFF[4+i*2]=(*Modbus_HoldReg[startRegAddr+i]>>8)&0xFF; //后发送高字节
}
calCRC=CRC_Compute(RS485_TX_BUFF,RegNum*2+3);
RS485_TX_BUFF[RegNum*2+3]=calCRC&0xFF;
RS485_TX_BUFF[RegNum*2+4]=(calCRC>>8)&0xFF;
RS485_SendData(RS485_TX_BUFF,RegNum*2+5);
}
else//寄存器地址+数量超出范围
{
RS485_TX_BUFF[0]=RS485_RX_BUFF[0];
RS485_TX_BUFF[1]=RS485_RX_BUFF[1]|0x80;
RS485_TX_BUFF[2]=0x02; //异常码
RS485_SendData(RS485_TX_BUFF,3);
}
}
//Modbus功能码06处理程序
//写单个保持寄存器
void Modbus_06_Solve(void)
{
*Modbus_HoldReg[startRegAddr]=RS485_RX_BUFF[4];//低字节在前
*Modbus_HoldReg[startRegAddr]|=((u16)RS485_RX_BUFF[5])<<8;//高字节在后
RS485_TX_BUFF[0]=RS485_RX_BUFF[0];
RS485_TX_BUFF[1]=RS485_RX_BUFF[1];
RS485_TX_BUFF[2]=RS485_RX_BUFF[2];
RS485_TX_BUFF[3]=RS485_RX_BUFF[3];
RS485_TX_BUFF[4]=RS485_RX_BUFF[4];
RS485_TX_BUFF[5]=RS485_RX_BUFF[5];
calCRC=CRC_Compute(RS485_TX_BUFF,6);
RS485_TX_BUFF[6]=calCRC&0xFF;
RS485_TX_BUFF[7]=(calCRC>>8)&0xFF;
RS485_SendData(RS485_TX_BUFF,8);
}
//Modbus功能码16处理程序
//写多个保持寄存器
void Modbus_16_Solve(void)
{
u8 i;
RegNum= (((u16)RS485_RX_BUFF[4])<<8)|RS485_RX_BUFF[5];//获取寄存器数量
if((startRegAddr+RegNum)<1000)//寄存器地址+数量在范围内
{
for(i=0;i7+i*2]; //低字节在前
*Modbus_HoldReg[startRegAddr+i]|=((u16)RS485_RX_BUFF[8+i*2])<<8; //高字节在后
}
RS485_TX_BUFF[0]=RS485_RX_BUFF[0];
RS485_TX_BUFF[1]=RS485_RX_BUFF[1];
RS485_TX_BUFF[2]=RS485_RX_BUFF[2];
RS485_TX_BUFF[3]=RS485_RX_BUFF[3];
RS485_TX_BUFF[4]=RS485_RX_BUFF[4];
RS485_TX_BUFF[5]=RS485_RX_BUFF[5];
calCRC=CRC_Compute(RS485_TX_BUFF,6);
RS485_TX_BUFF[6]=calCRC&0xFF;
RS485_TX_BUFF[7]=(calCRC>>8)&0xFF;
RS485_SendData(RS485_TX_BUFF,8);
}
else//寄存器地址+数量超出范围
{
RS485_TX_BUFF[0]=RS485_RX_BUFF[0];
RS485_TX_BUFF[1]=RS485_RX_BUFF[1]|0x80;
RS485_TX_BUFF[2]=0x02; //异常码
RS485_SendData(RS485_TX_BUFF,3);
}
}