kinect实时抠图程序
kinect实时抠图程序
深度图像可以确定人体的像素,bodyindex框架也是利用深度数据做处理来得到人体的像素点的,故我们可以联合彩色框架和bodyinedx框架来做一个抠图程序,彩色框架的分辨率是1920*1080,而bodyindex框架的分辨率是512*424,我们首先来判断bodyindex框架中的人体数据来标定彩色框架中属于人体的数据,如果属于人体,则显示出来,如果不属于人体,则拉黑。所以显示的彩色图像中只有属于人体的数据了。不过彩色框架中的数据是如何映射到深度框架中的数据的,我这里用的是CoordinateMapper类,这个类时kinect v2的sdk中提供的,不过映射的效果就有点。。。边缘处理的不平滑。如果要想边缘效果变得很好的话,就需要自己写函数来处理深度数据了。源码微软kinect v2sdk里面包含,大家可以去下载。
我的代码如下,关于xml的代码我就不贴出来了,添加一个背景图片和image用来显示实时图像就可以了。
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using System.Windows;
using System.Windows.Controls;
using System.Windows.Data;
using System.Windows.Documents;
using System.Windows.Input;
using System.Windows.Media;
using System.Windows.Media.Imaging;
using System.Windows.Navigation;
using System.Windows.Shapes;
using Microsoft.Kinect;
namespace 抠图
{
///
/// MainWindow.xaml 的交互逻辑
///
public partial class MainWindow : Window
{
//人体索引帧
private KinectSensor kinect1 = null;
private MultiSourceFrameReader multiframe = null;
private uint bitmapbackbufer = 0;
private DepthSpacePoint[] colormappertodepthponters = null;
private readonly int byteperpixel = (PixelFormats.Bgr32.BitsPerPixel+7)/8;//位图中RGB像素的大小
private WriteableBitmap colorbitmap = null;//位图
public MainWindow()
{
InitializeComponent();
this.kinect1 = KinectSensor.GetDefault();//得到设备
this.multiframe = this.kinect1.OpenMultiSourceFrameReader(FrameSourceTypes.Color | FrameSourceTypes.BodyIndex | FrameSourceTypes.Depth);
//多源帧框架读取器
this.multiframe.MultiSourceFrameArrived += mulsourceframe_MultiSourceFrameArrived;
//注册证到达事件,在事件里面对数据进行处理
FrameDescription depthdescription = this.kinect1.DepthFrameSource.FrameDescription;//帧描述,获取高度,宽度等
FrameDescription colordescription = this.kinect1.ColorFrameSource.CreateFrameDescription(ColorImageFormat.Bgra);
int depthwidth = depthdescription.Width; int depthheight = depthdescription.Height;
int colorwidth = colordescription.Width; int colorheight = colordescription.Height;
this.colormappertodepthponters = new DepthSpacePoint[colorwidth*colorheight];//这里为什么要是彩色框架的大小呢?是因为该深度数组要映射到彩色空间,所以必须是彩色框架的大小
this.colorbitmap = new WriteableBitmap(colorwidth, colorheight, 96.0, 96.0, PixelFormats.Bgra32, null);//位图初始化
this.bitmapbackbufer = (uint)((this.colorbitmap.BackBufferStride*(this.colorbitmap.PixelHeight-1))+(this.colorbitmap.PixelWidth*byteperpixel));
//得到彩色框架后台缓冲区的大小
this.body_pose.Source = this.colorbitmap;
this.kinect1.Open();
}
private void mulsourceframe_MultiSourceFrameArrived(object sender, MultiSourceFrameArrivedEventArgs e)
{//数据处理,既然要深度数据用于判断,则要获取深度数据
int depthWidth = 0;
int depthHeight = 0;
DepthFrame depthFrame = null;
ColorFrame colorFrame = null;
BodyIndexFrame bodyIndexFrame = null;
bool isBitmapLocked = false;
MultiSourceFrame multiSourceFrame = e.FrameReference.AcquireFrame();
// 帧为空则返回
if (multiSourceFrame == null)
{
return;
}
try
{
depthFrame = multiSourceFrame.DepthFrameReference.AcquireFrame();
colorFrame = multiSourceFrame.ColorFrameReference.AcquireFrame();
bodyIndexFrame = multiSourceFrame.BodyIndexFrameReference.AcquireFrame();
if ((depthFrame == null) || (colorFrame == null) || (bodyIndexFrame == null))
{
return;
}
// 深度帧的描述
FrameDescription depthFrameDescription = depthFrame.FrameDescription;
depthWidth = depthFrameDescription.Width;
depthHeight = depthFrameDescription.Height;
// 使用深度帧数据将整个帧从颜色空间映射到深度空间
using (KinectBuffer depthFrameData = depthFrame.LockImageBuffer())
{
this.kinect1.CoordinateMapper.MapColorFrameToDepthSpaceUsingIntPtr(
depthFrameData.UnderlyingBuffer,
depthFrameData.Size,
this.colormappertodepthponters);//现在colormapperdepthponters里面全是从颜色空间映射到深度空间的数据,这样就可以用深度数据来标定彩色数据了
}
// 释放
depthFrame.Dispose();
depthFrame = null;
// Lock the bitmap for writing
this.colorbitmap.Lock();
isBitmapLocked = true;
//将原始格式转换为所需格式,并将数据复制到所提供的内存位置。
colorFrame.CopyConvertedFrameDataToIntPtr(this.colorbitmap.BackBuffer, this.bitmapbackbufer, ColorImageFormat.Bgra);
// We're done with the ColorFrame
colorFrame.Dispose();
colorFrame = null;
using (KinectBuffer bodyIndexData = bodyIndexFrame.LockImageBuffer())
{
unsafe
{
byte* bodyIndexDataPointer = (byte*)bodyIndexData.UnderlyingBuffer;
int colorMappedToDepthPointCount = this.colormappertodepthponters.Length;
fixed (DepthSpacePoint* colorMappedToDepthPointsPointer = this.colormappertodepthponters)
{
//得到彩色帧后台缓冲区的数据,即彩色帧数据
uint* bitmapPixelsPointer = (uint*)this.colorbitmap.BackBuffer;
// 循环判断深度数据中每一点的像素数据,如果属于人体,则把彩色帧中的该点显示,否则置零。
for (int colorIndex = 0; colorIndex < colorMappedToDepthPointCount; ++colorIndex)
{
float colorMappedToDepthX = colorMappedToDepthPointsPointer[colorIndex].X;
float colorMappedToDepthY = colorMappedToDepthPointsPointer[colorIndex].Y;
if (!float.IsNegativeInfinity(colorMappedToDepthX) &&
!float.IsNegativeInfinity(colorMappedToDepthY))
{
// 确保深度像素映射到彩色空间中的有效点
int depthX = (int)(colorMappedToDepthX + 0.5f);
int depthY = (int)(colorMappedToDepthY + 0.5f);
if ((depthX >= 0) && (depthX < depthWidth) && (depthY >= 0) && (depthY < depthHeight))
{
int depthIndex = (depthY * depthWidth) + depthX;
//如果是属于人体的像素则跳过这次循环
if (bodyIndexDataPointer[depthIndex] != 0xff)
{
continue;
}
}
}
//否则将彩色图像中这点的数据置零
bitmapPixelsPointer[colorIndex] = 0;
}
}
this.colorbitmap.AddDirtyRect(new Int32Rect(0, 0, this.colorbitmap.PixelWidth, this.colorbitmap.PixelHeight));
}
}
}
finally
{
if (isBitmapLocked)
{
this.colorbitmap.Unlock();
}
if (depthFrame != null)
{
depthFrame.Dispose();
}
if (colorFrame != null)
{
colorFrame.Dispose();
}
if (bodyIndexFrame != null)
{
bodyIndexFrame.Dispose();
}
}
}
private void Windows_closing(object sender, System.ComponentModel.CancelEventArgs e)
{
if (this.multiframe != null)
{
this.multiframe.Dispose();
this.multiframe = null;
}
if (this.kinect1 != null)
{
this.kinect1.Close();
this.kinect1 = null;
}
}
}
}
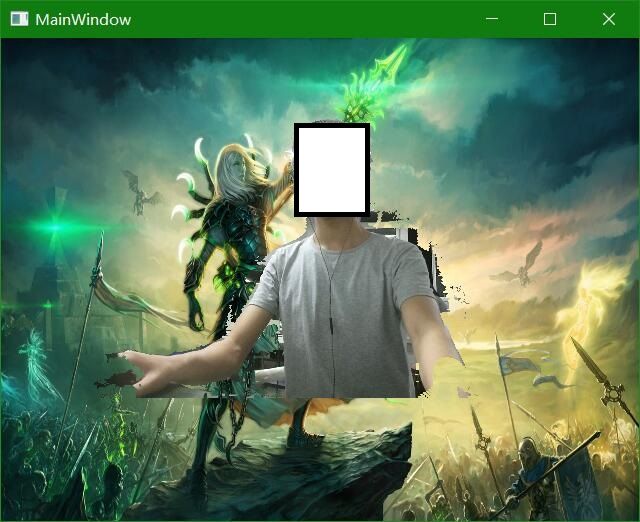
总之,实时抠图程序思想就是这样,效果还可以慢慢去改,不过有框架改的时候好很多,就是根据深度数据判断,标定彩色数据,然后根据标定的彩色数据显示即可。具体的运行效果如下: